一种基于虚拟移动长基线的多AUV协同导航算法
2013-05-28张福斌
张福斌, 马 朋
一种基于虚拟移动长基线的多AUV协同导航算法
张福斌, 马 朋
(西北工业大学 航海学院, 陕西 西安, 710072)
高精度的协同导航定位是多自主水下航行器(MAUVs)协同作业的基础, 协同导航算法是多AUV协同的关键技术。针对双领航者广播通信模式下的多AUV协同导航系统, 基于移动长基线(MLBL)导航理论, 提出并建立了一种虚拟移动长基线(SMLBL)协同导航模型, 应用加权最小二乘法, 设计了基于单向水声通信的协同导航算法, 使得跟随AUV内、外部导航信息得到有效融合。仿真结果表明, 该算法可大幅度提高跟随AUV的导航定位精度。
多自主水下航行器; 虚拟移动长基线; 协同导航定位
0 引言
在多自主水下航行器(multiple autonomous underwater vehicles, MAUVs)协同导航定位系统中, 利用水声通信技术测量AUV间相对位置关系, 提高系统整体定位精度, 已成为国内外MAUVs导航定位领域研究重点。2000年, Larsen M.B[1-2]等提出了虚拟长基线(synthetic long baseline, SLBL)的概念, 并利用自行设计的SLBL和航位推算系统进行了试验, 取得了不错效果。2004年, Vaganay J[3]等在基于几何解算的协同定位研究中, 首次提出“移动长基线”的概念, 即利用无人水面舰船或水面浮标充当可移动的长基线定位基阵, 通过AUV间的探测和定位方程的解算确定AUV的位置坐标。2005年, Curcio[4]等研究了基于移动长基线的协同定位算法, 利用时间同步信号和水声传播延迟进行相对位置测量, 对1个领航者、2个跟随者进行了试验, 并进行了误差分析; Bahr A[5]等应用卡尔曼滤波对领航-跟随式多AUV协同定位方法进行了研究, 并进行了试验验证。2008年, 张立川[6-7]等在测量水声传播延迟的条件下, 对多AUV协同导航算法进行了研究; Yao Yao[8]等研究了多AUV间的位置关系对协同定位精度的影响。2010年, 李闻白[9]等在基于单信标测距的水下协同导航系统中给出了可观测性分析。
当前, 多AUV协同导航的问题与难点在于AUV间相对位置关系的测量, 而水下通信时间延迟及时钟漂移都会对AUV协同导航定位精度造成影响。本文针对双领航者广播通信模式下的多AUV协同导航系统, 基于移动长基线(moving long baseline, MLBL)导航理论, 提出并建立了一种虚拟移动长基线(synthetic moving long baseline, SMLBL)协同导航模型, 应用加权最小二乘法, 设计了基于单向水声通信的协同导航算法, 并进行了数学仿真验证。
1 移动长基线定位系统
长基线(long baseline, LBL)水声定位系统[10]通常是由基线长度为几千米的海底应答器阵和被定位载体上的问答器组成。如图1所示, 它利用各应答器与问答器间的声波往返时间确定水下载体与各应答器间的距离, 并据距离信息, 通过定位方程解算得水下载体相对于海底应答器阵的相对坐标。在海底应答器阵绝对地理位置已知情况下, 解算出水下载体在大地坐标系的绝对位置。
LBL水声定位的基线长度一般为100~6 000 m, 定位精度较高, 但在深水区使用时, 位置数据更新率较低, 布放、校准和回收作业过程较为繁琐, 仅能提供固定区域的导航定位服务。近年来, 在传统LBL水声定位系统基础上, 发展出了MLBL水声定位系统, 最大特点是应答器不是固定布设在海底, 而是多布设在大型AUV上, 见图2。
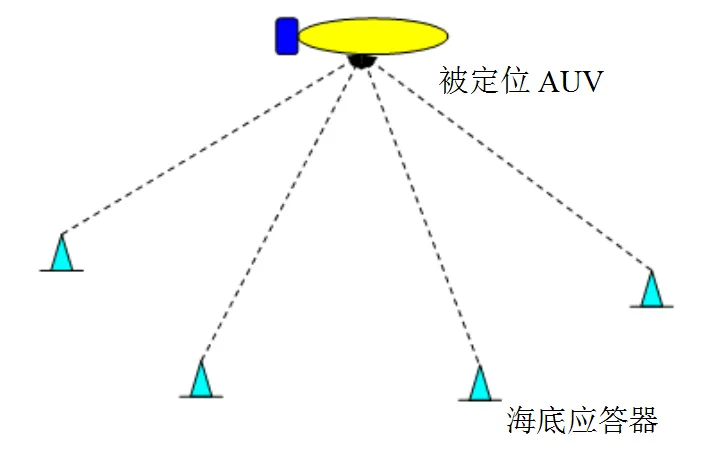
图1 长基线水声定位系统

图2 移动长基线水声定位系统
在MLBL水声定位系统进行导航定位过程中采用单向水声通信测距模式。步骤如下: 1) 所有AUV均统一内部时钟; 2) 所有主AUV采用广播方式以不同频率同时发送水声信息数据包, 包括时间、位置、位置估计方差等信息; 3) 被定位AUV在接收到水声信息数据包后, 通过计算被定位AUV当前时刻与主AUV发送信息时刻间的时间差, 即可获得两者之间的斜距; 4) 利用主AUV位置信息以及计算所得斜距信息, 根据一定导航算法更新被定位AUV位置信息。
2 SMLBL定位系统
在基于双领航者广播通信的多AUV协同导航系统中, 领航AUV配置高精度导航定位设备和水声通信装置, 跟随AUV配置低精度导航定位设备和水声通信装置, 协同导航过程中利用同步时钟进行单向水声通信测距。

图3 虚拟移动长基线水声定位系统
3 基于加权最小二乘的导航算法
3.1 AUV运动数学模型
3.2 基于加权最小二乘的协同导航算法








简化上式为


写为矩阵形式, 有

其中



4 时钟同步问题
利用SMLBL进行协同导航过程中, AUV间相对位置关系的测量是决定导航精度的关键, AUV间距离测量误差越大, 则跟随AUV导航定位精度越低。为了降低AUV功耗, 提高数据更新速率, 选择单向水声通信测距模式, 领航、跟随AUV均配备低功耗精确稳定的同步时钟。单向测距法要求所有AUV内部时钟时刻保持同步, 虽在AUV出航前可通过GPS授时等方式实现, 但随着时间的增加, AUV内部时钟电路必然会产生漂移, 从而对水声距离测量精度造成影响, 进而影响跟随AUV定位精度。AUV时钟同步问题虽可通过外部GPS授时、内部时间协同等方式解决, 但非本文研究重点, 则另文重点分析。
5 仿真结果与分析
为了验证算法的有效性, 进行MATLAB仿真分析研究。在本算法仿真中将AUV 3D运动简化成2D运动。

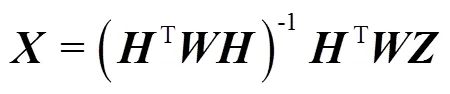
图4 领航和跟随AUV的航行轨迹
图4为跟随AUV的真实轨迹以及协同定位轨迹; 图5为跟随AUV协同定位误差与航位推算误差的比较; 图6和图7为跟随AUV的协同定位误差。由图6、图7可以看出, 利用SMLBL协同导航定位算法, 可以有效地抑制跟随AUV定位误差增长, 大幅度提高导航定位精度。
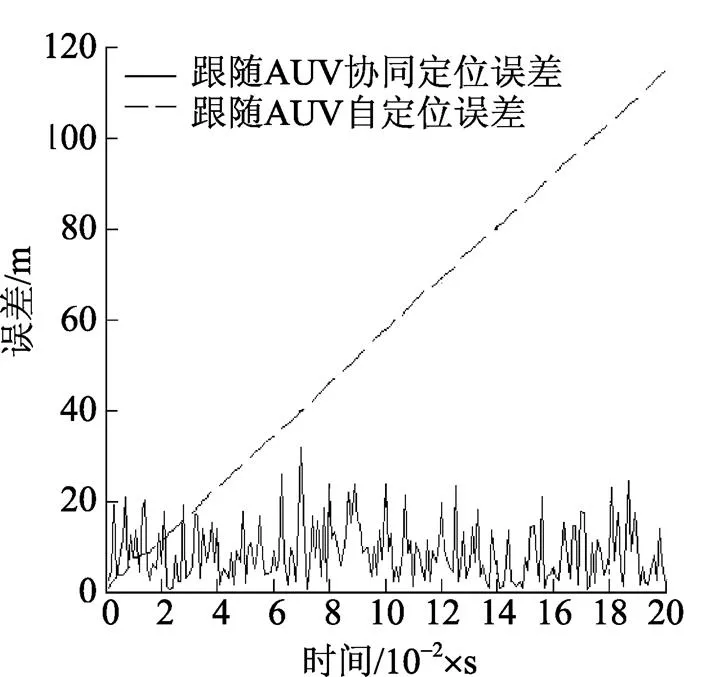
图5 跟随AUV定位误差

图6 跟随AUV协同定位x轴误差
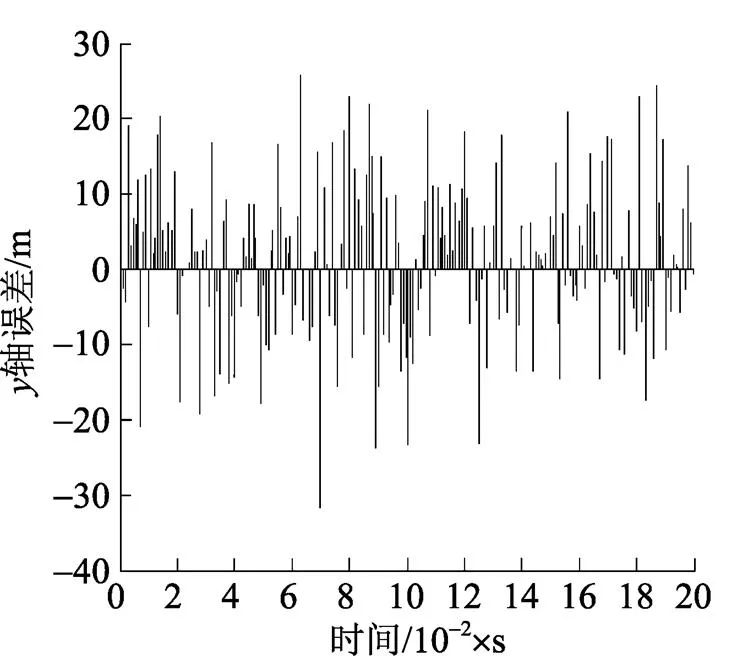
图7 跟随AUV协同定位y轴误差
6 结束语
本文针对领航AUV广播通信的多AUV协同导航问题进行了研究, 建立了SMLBL协同导航模型, 基于加权最小二乘法设计了一种多AUV协同导航算法, 并进行了仿真验证, 结果表明, 所提算法能有效抑制跟随AUV定位误差增长, 提高其导航定位精度。
[1] Larsen M B. High Performance Doppler Inertial Navigation Experimental Results[C]//OCEAN 2000MTS/IEEE Confe- rence and Exhibition, Providence, RI, 2000: 1449-14.
[2] Larsen M B. Synthetic Long Baseline Navigatin of Under- water Vehicles[C]//OCEANS 2000 MTS/IEEE Conference and Exhibition, 2000: 2043-2050.
[3] Vaganay J, Leonard J J, Curcio A C, et al. Experimental Validation of the Moving Long Baseline Navigation Concept[C]// Proceedings of the IEEE Oceanic Engineering Society AUV 2004 Conference, 2004: 59-65.
[4] Curcio J, Leonard J, Vaganay J, et al. Experiments Inmoving Baseline Navigation Using Auto-nomous Surface Craft[C]// Proceedings of the 2005 MTS/IEEE Oceans Conference. IEEE, 2005: 730-735.
[5] Bahr A, Leonard J. Cooperative Localization for AutonomousUnderwater Vehicles[C]//In Proceedings of the10th International Symposiumon Experimental Robotics (ISER), 2006: 1-10.
[6] 张立川, 刘明雍, 徐德民, 等. 基于水声传播延迟的主从式多无人水下航行器协同导航定位研究[J]. 兵工学报, 2009, 30(12): 1674-1678.Zhang Li-chuan, Liu Ming-yong, Xu De-min, et al. CooperativeLocalization for Multi-UUV Based on Time-of-flight of Acoustic Signal[J]. Acta Armamentarii, 2009, 30(12): 1674-1678.
[7] 张立川, 徐德民, 刘明雍, 等. 基于移动长基线的多AUV协同导航[J]. 机器人, 2009, 31(6): 581-585.Zhang Li-chuan, Xu De-min, Liu Ming-yong, et al. CooperativeNavigation of Multiple AUVs using Moving Long Baseline[J]. Robot, 2009, 31(6): 581-585.
[8] Yao Yao, De-min Xu, Wei-sheng Yan, et al. An Optimal Measure Choosing Strategy to AUVs Cooperative Localization[C]// Proceedings of 4thIEEE Conference on Indu-strial Electr- onic and Application(ICIEA), 2009: 1889-1894.
[9] 刘明雍, 李闻白, 刘富樯, 等. 基于单信标测距的水下导航系统可观测性分析[J]. 西北工业大学学报, 2011, 29(1): 87-92. Liu Ming-yong, Li Wen-bai, Liu Fu-qiang, et al. Observability Analysis for Underwater Navigation System Based on Range Measurements with a Single Beacon[J]. Journal of Northwestern Polytechnical University, 2011, 29(1): 87-92.
[10] 田坦. 水下定位与导航技术[M]. 北京: 国防工业出版社, 2007.
A Cooperative Navigation Algorithm of Multiple AUVs Based on Synthetic Moving Long Baseline
ZHANG Fu-bin, MA Peng
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
High precision cooperative navigation and localization are the bases for multiple autonomous underwater vehicles(MAUVs) cooperation, and cooperative navigation algorithm is the key technique of multiple AUVs cooperation. In a multiple AUVs cooperation system composed of two leader AUVs with high precision navigation sensors and multiple follower AUVs with low precision navigation sensors, assuming the follower AUVs receive the broadcast information from the leader AUVs using acoustic communication equipments, the distance between leader and follower AUVs, as well as the leader AUVs position information, can be obtained. In this paper, a cooperative navigation system model is established by taking the leader AUVs as the synthetic moving long baseline(SMLBL) nodes, a multiple cooperative navigation algorithm is proposed based on one-way acoustic broadcast communication from leader AUVs, and effective fusion of the internal and external navigation information of the follower AUVs is achieved. Simulation results indicate that the proposed algorithm can greatly improve the navigation accuracy of the follower AUVs.
multiple autonomous underwater vehicles; synthetic moving long baseline(SMLBL); cooperative navigation and localization
TJ630.33
A
1673-1948(2013)02-0115-05
2012-09-02;
2012-11-12.
国家自然科学基金(61273333), 西北工业大学基础研究基金(JC20100224).
张福斌(1972-), 男, 博士, 副教授, 研究方向为水下航行器导航与控制技术.
(责任编辑: 杨力军)
