“LPP-EUV”光源中的高功率CO2激光监测与控制系统
2013-04-27姜振华王挺峰
姜振华,王挺峰,郭 劲
(中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033)
“LPP-EUV”光源中的高功率CO2激光监测与控制系统
姜振华*,王挺峰,郭 劲
(中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033)
为了满足激光诱导等离子体(LPP)体制下极紫外(EUV)光源对CO2激光器提出的稳定性需求,建立了简化的CO2激光传输系统模型,根据光束稳定性需求对光束功率、指向和位置的监测与控制方法进行了理论和实验研究。根据高功率CO2激光传输系统特点,在实验室内建立了上述光束监测和控制实验系统,包括光束功率控制模块、光束指向控制模块和光束参数监测模块,其中光束参数监测模块可实时测量光束功率、指向、尺寸及发散角等重要参数。仿真与实验结果表明:光束功率控制模块对线偏振激光功率的控制接近1%~100%,光束指向控制模块实现的光束指向稳定度在10 μrad以内,可满足CO2激光驱动源的高稳定性要求。
极紫外光源;CO2激光器;参数监测;指向控制
1 引 言
光刻机中采用13.5 nm极紫外[1](EUV)光源可进一步提高集成度,制作出更加精细的半导体器件[2]。目前开展的紫外光源研究集中在激光诱导等离子体[3](LPP)和放电等离子体[4](DPP)这两种体制上。LPP-EUV光源具有收集效率高、热负载小等优点,是极紫外光源研发的重点[5]。
LPP是指利用高能脉冲照射高密度靶,从而激发等离子体获取极紫外光[6]。在驱动光源的选择上,由于CO2激光器具有转换效率高、离子体碎屑少等优势[7],使其成为了LPP-EUV体制下的主要驱动激光源。CO2驱动激光通常由高重频调Q CO2主振荡激光器加多级激光放大器[8](Master Oscillator and Power Amplifier,MOPA)来实现,整个CO2激光系统的光路传输长度在100 m左右,光路中所用各种光学元件在200个左右,每个光学元件不可避免地会受到振动、热变形和电压稳定性等因素的影响,造成光束指向和功率的漂移[9]。目前,常规CO2激光器光束功率漂移为2%~5%,难以获得稳定的极紫外光输出。激光器的光束指向漂移为±100μrad,位置漂移为± 100μm,经过光束传输系统后,所产生的聚焦光斑位置漂移将严重地影响打靶精度[10]。为保证高能脉冲激光能够稳定、精确地照射到液滴靶上,对CO2激光系统提出了相当苛刻的稳定性要求[11]。
美国的Cymer公司针对极紫外输出光提出了一种光束指向稳定方案[12],以确保极紫外光照射硅片时的光束稳定需求,但该方案并不适用于长波及高功率CO2驱动源所带来的特殊工作环境。日本的Gigaphoton公司设计了一套CO2激光传输系统[13],能够实现对光束指向的稳定控制,对激光器内放大效率有明显增益效果,但不能实现高密度液滴靶照明光的功率控制。
本文针对LPP-EUV系统对驱动源功率和指向的稳定性需求,设计一种适用于LPP-EUV体制下CO2激光器的光束传输系统。通过主动控制的方式,实时监测和控制CO2激光的功率与指向稳定性,以解决光束传输系统中光束控制问题,实现高稳定的CO2激光输出。
2 光束监测与控制系统构成及其功能
图1为光束监测与对准系统组成图。它主要由光束功率控制单元、光束指向控制单元、激光参数监测单元等组成,系统安放在密封导光装置内,保证环境清洁并避免杂散光逸出。

图1 光束监测与对准系统原理框图Fig.1 Functional block diagram of beam monitoring and aligning system
2.1 光束功率控制模块的构成及功能
图2为光束功率控制模块组成图。它主要由起偏器、检偏器、光束偏移补偿组、伺服驱动电机和支撑结构等构成。该模块的功能是对入射激光进行选偏并实现功率控制。
激光以布儒斯特角入射光束功率控制模块,硒化锌片堆组成的起偏器筛选出光束中的水平偏振光,阻止垂直偏振光透过。利用伺服驱动电机改变检偏器的角度,即可控制偏振光透过强度。光束通过起偏器与检偏器后,光束会发生偏移,光束偏移补偿组的作用是补偿这一部分光束偏移,使出射光与入射光同轴出射。

图2 光束功率控制模块原理图Fig.2 Schematic diagram of beam power control system
2.2 光束指向控制模块的构成及功能
图3为光束指向控制模块组成图。它主要由两套二维快速反射镜,两个高能激光分束器以及相应的控制模块组成。光束指向控制模块的功能是对入射激光的位置偏移和指向偏移进行校正,保证出射激光沿预设光轴同轴出射。

图3 光束指向控制模块原理图Fig.3 Schematic diagram of beam pointing control system
2.3 光束参数监测模块的构成及功能
图4为光束参数监测模块组成图。它主要由激光能量计、光束质量分析仪及两套长波四象限探测器等构成。它的功能是实时监测激光功率、光束位置、光束指向及光束发散角和尺寸等重要参数,同时为光束功率和指向控制模块提供控制输入。
激光能量计实时监测光束能量,作为光束功率控制模块的反馈输入。两套长波四象限探测器分别监测光束位置和指向,作为光束指向控制模块的控制输入。光束质量分析仪监测光束尺寸及发散角等重要参数,以供系统分析激光器性能所需。

图4 光束参数监测模块原理框图Fig.4 Functionalblock diagram of beam parametermonitoring system
3 光束监测与控制系统的工作原理
光束监测与控制系统的工作原理为:通过激光参数监测模块对光束功率、位置、指向等重要参数进行实时测量及分析,光束功率的变化作为光束功率控制模块的控制输入,利用功率控制算法对光束功率进行实时控制。光束位置、指向的变化作为光束指向控制模块的控制输入,利用指向稳定算法对光束位置和指向进行实时控制。
3.1 光束功率监视与控制原理
在保证主光路光功率不会受到明显影响的前提下,利用分束器对CO2激光进行采样,通常采样比例为1%或更低,采样后的光束进入激光能量计,实时测量光束能量并通过预处理软件对光束能量进行等比例还原等数据处理工作。
测量到的光束能量变化视为光束功率的扰动量,利用内嵌有PID控制算法的伺服电机控制器驱动伺服电机改变检偏器角度,进而改变出射激光功率。
以左旋圆偏振光入射为例,左旋圆偏振光的归一化斯托克斯矢量为{1,0,0,-1},水平线偏振光的归一化斯托克斯矢量为{1,1,0,0},透光轴在水平方向上的偏振器的密勒矩阵M如式(1)所示。从式(2)中可以看出,以布儒斯特角入射的左旋圆偏振光从偏振器出射后为水平线偏振光,光强为入射圆偏振光光强的50%。出射的水平线偏振光再经过透光轴与偏振器透光轴成θ角的检偏器后出射光仍为水平线偏振光,光强为左旋圆偏振光的cos2θ/2。

因此,实时调整检偏器角度即可实现对水平线偏振光功率的有效控制,控制能力理论上可达0%~100%。实际操作过程中,由于偏振器件并不是理想的,通常最高消光比只能达到500∶1。
3.2 光束指向监视与控制原理
光束指向监视与控制装置中的核心是两块高精度快速反射镜和两个四象限位置探测器。第一块快速反射镜用于校正光束的位置偏移,其作用是将光束投射到第二块快速反射镜的镜面中心,并使其稳定在该位置,光束位置偏移量的动态反馈由光束参数监测模块中的第一块四象限位置探测器提供。第二块快速反射镜用于校正光束的角度偏移,将光束稳定在系统预设的光轴上,光束空间角度偏移量由光束参数监测模块中的第二块四象限位置探测器实现动态反馈。激光光束指向监视与控制装置中,两个四象限位置探测器共同实现对光束位置、指向稳定性的四维监视;两套由快速反射镜与四象限探测器组成的闭环控制回路协同实现激光光束沿预设光轴出射。
4 测量实验与结果
4.1 光束功率控制实验
光束功率控制实验原理如图5所示,光源采用波段为532 nm的连续固体激光器,偏振器件为北光生产的反射式偏振片,旋转台为北京卓立汉光仪器有限公司生产的RSA200电动转台,功率计为ophir公司的30(150)A。实验过程如下:光束经起偏器选偏后出射光束为水平线偏振光,水平线偏振光由光束功率控制器改变光束功率后出射,功率计实时监测出射光功率。光束功率控制器主要由伺服旋转台与检偏器组成,检偏器透光轴与起偏器透光轴夹角θ随转台转动而改变。当θ为0时,透过光功率最大;θ为90°时,透过光功率最小。
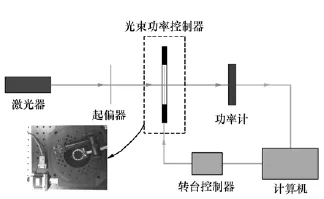
图5 光束功率控制实验原理图Fig.5 Schematic diagram of beam power control experiment
实验结果如图6所示,图中实验点绘制曲线为实测结果,平滑曲线为仿真所得的理论曲线。由图中可以看出,实验结果基本符合理论值,水平线偏振光功率变化约为1~100%,与理论值之间的均方根误差约为2.5 mW。误差主要来自控制系统的控制误差、光学元件热吸收、散射等因素,在实际工程应用中,可通过精确标定及进一步改进伺服控制系统以提高其控制精度。
4.2 光束指向监测与控制实验
在实验室内初步搭建了光束指向监测与控制实验平台,实验原理如图7所示。其主要由快速反射镜、位置检测传感器、光束取样器、聚焦透镜、数字控制系统等构成。实验光源采用波长为532 nm的连续型固体激光器;执行机构为德国PI公司生产的压电陶瓷快速反射镜;位置探测器分别采用了上海欧光公司生产的PSD探测器;光束取样元件为美国Thorlabs公司生产的光束取样镜,透反比为92∶8;数据处理器为美国NI公司的USB-6008数据采集卡;功率放大器为德国PI公司开发的E-504压电陶瓷功率放大模块;伺服控制器采取上下位机形式,基于Labview自主开发。

图6 光束功率随θ变化曲线Fig.6 Plot ofθ-power

图7 光束指向控制实验原理图Fig.7 Schemaitc diagram of beam pointing control experiment
光束漂移分离检测采用聚焦分离方式,利用聚焦透镜使PSD接收到的光斑偏移量只含有光束的指向偏差信息,光束指向偏移量可由式(3)得出。

式中:θx与θy是光束指向在两个正交方向上的指向偏移量,x与y是PSD测量得到的位置偏移量,f为聚焦透镜的焦距,实验中透镜焦距为10 cm。
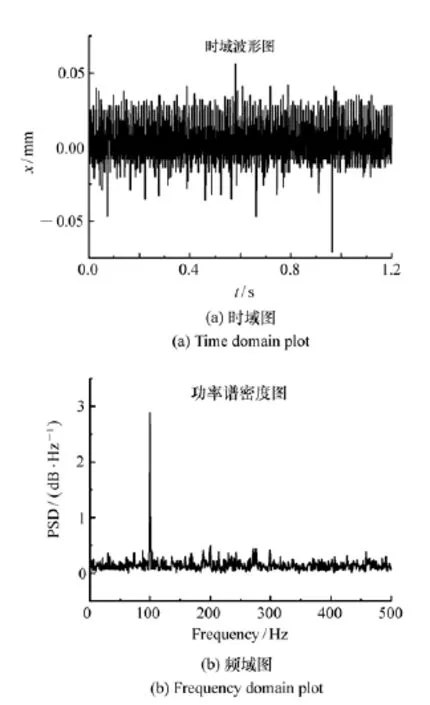
图8 校正前光束指向在x方向上的瞬时误差Fig.8 Beam pointing error in the x direction before correction
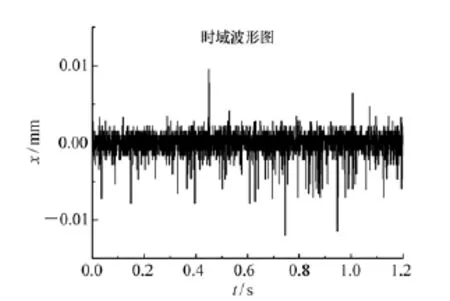
图9 校正后光束指向在x方向上的瞬时误差Fig.9 Beam pointing error in the x direction after correction
以x方向为例,光束指向控制模块工作前,实验激光器在x方向上光束指向漂移的时域与频域信息如图8(a)与图8(b)所示,光束指向漂移主要集中在100 Hz以内,漂移量峰-峰值为35μrad,RMS值为475μrad。实验激光器激光指向经光束指向控制模块校正后,采集3 000个数据点,获得的光束指向瞬时稳定性实验结果如图9所示,光束指向在x方向上瞬时变化的RMS值为10μrad,峰峰值约90μrad。
从光束指向控制原理中可以看出,当位置敏感探测器前的透镜焦距足够长时,理论上光束指向控制精度只受限与快速反射镜控制精度,目前快速反射镜控制精度普遍可以达到微弧度量级,因此,在实际工程应用中,通过优化系统组成和布局还可进一步提高光束指向控制模块的性能。
5 结 论
本文针对LPP-EUV体制对CO2激光驱动源提出的稳定性要求,设计了一套光束监测与控制系统,该系统能够完成对激光束功率、指向、位置、发散角及尺寸等重要参数的实时监测,并实现激光功率与指向的实时控制。文中介绍了各组成模块的工作原理,并初步搭建了光束功率控制与指向控制实验平台,开展了基于偏振法的光束功率控制和基于快速反射镜的光束指向控制实验。实验结果表明:光束功率控制模块对线偏振光具有良好的控制效果,功率控制能力接近1~100%,光束指向控制模块可实现10μrad的光束稳定性指标,可以满足CO2激光驱动源的高稳定性要求。目前的快速反射镜控制精度普遍达到了微弧度量级,当位置敏感探测器前的透镜焦距足够长时,控制精度将只受限于快速反射镜的控制精度。在实际工程应用中,通过优化系统还可进一步提高光束指向控制模块的性能。
[1] 谢常青,叶甜春.极端远紫外光刻技术[J].半导体情报,2011,38(5):28-32. XIE C Q,YE T CH.Extreme ultraviolet lithography technology[J].Semiconductor Information,2011,38(5):28-32.(in Chinese)
[2] 王占山,曹建林,陈星旦.极紫外投影光刻技术[J].科学通报,1998,43(8):785-791. WANG Z SH,CAO JL,CHEN X D.Extreme ultraviolet lithography technology[J].Chinese Science Bull.,1998,43(8):785-791.(in Chinese)
[3] 窦银萍,孙长凯,林景全.激光等离子体极紫外光刻光源[J].中国光学,2013,6(1):20-33. DOU Y P,SUN CH K,LIN JQ.Laser-produced plasma light source for extreme ultraviolet lithography[J].Chinese Optics,2013,6(1):20-33.(in Chinese)
[4] SONG IH,WATANABE M,HAYASHIY,et al..Experimental study of capillary Z-pinch discharge plasma for EUV lithography[C]//31stEPSConference on Plasma Phys,Jun 28-July 2,2004,London,UK,2004.
[5] 程元丽,李思宁,王骐.激光等离子体和气体放电EUV光刻光源[J].激光技术,2004,28(6):561-564. CHENG Y L,LISN,WANG Q.Extreme ultraviolet source ofmicrolithography based on laser induced plasma and discharge induced plasma[J].Laser Technology,2004,28(6):561-564.(in Chinese)
[6] MATSUOKA Y,NAKAIY,FUJIOKA S,et al..Comparative and quantitative study of neutral debris emanated from tin plasmas produced by neodymium-doped yttrium-aluminum-garnet and carbon dioxide laser pulses[J].Appl.Phys.Lett.,2010,97:111502
[7] TAO Y,TILLACK M S,SEQUOIA K L,etal..Efficient13.5 nm extreme ultraviolet emission from Sn plasma irradiated by a lon CO2laser pulse[J].Appl.Phys.Lett..,2008,92:251501
[8] EUV radiation characteristics of a CO2laser produced Xe plasma[J].Appl.Physics B,2006,83(2):213-218
[9] 吴伟伟,唐军,吴兆杰.高能脉冲激光远场多参量测试系统设计[J].光学与光电技术,2011,9(1):9-12. WUW W,TANG J,WU ZH J.Design of far-field muti-parameters testing system for high-energy pulsed laser[J].Opt. Optoelectronic Technol.,2011,9(1):9-12.(in Chinese)
[10] 刘芳,徐嘉,张燕,等.光学器件微振动引起的光束指向稳定性分析[J].光学学报,2011,31(11):1120001-7. LIU F,XU J,ZHANG Y,etal..Analysis on beam directing stability problem caused bymicro-vibration ofoptical compo-nents[J].Acta Optica Sinc,2011,31(11):1120001-7.(in Chinese)
[11] 王思雯,郭立红,赵帅,等.高功率CO2激光对远场HgCdTe探测器的干扰实验[J].光学精密工程,2010,18(4):798-804. WANG SW,GUO LH,ZHAO SH,et al..Experiments of high-power CO2laser disturbance to far-field HgCdTe detectors[J].Opt.Precision Eng.,2010,18(4):798-804.(in Chinese)
[12] LUBLINA L,WARKENTINA D,DASPP,etal..High-performance beam stabilization for next-generation arf beam delivery systems[J].SPIE,2003,5040:1682-1693.
[13] FUJIMOTO J,OHTA T,NOWAK K M,et al..Development of the reliable 20 kW class pulsed carbon dioxide laser system for LPP EUV light source[J].SPIE,2011,7969:79692S.
Monitoring and controlling system for high power CO2laser in“LPP-EUV”light source
JIANG Zhen-hua*,WANG Ting-feng,GUO Jin
(State Key Laboratory of Laser Interaction with Matter,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,Chian)
*Corresponding author,E-mail:pily09@163.com
Tomeet the high stability requirements of the extreme ultraviolet(EUV)light source driven by a CO2laser under the Laser Produced Plasma(LPP)system,the simplified CO2laser transmission system model is established.Themonitoring and controllingmethods of the beam power,pointing and the location are studied theoretically and experimentally based on the requirements of the beam stability.The beam monitoring and controlling experimental system is set up in a laboratory according to the characteristics of the high-power CO2laser transmission system.The system includes a beam power controlmodule,a beam pointing controlmodule and a beam parametermonitoring module.The beam parametermonitoring module can accomplish the realtimemeasurements of beam powers,pointing,sizes and divergence angles and other important parameters.The simulation and experimental results show that the beam power controlmodule can control the linearly polarized laser power from 1%to 100%and the beam pointing controlmodule can control the beam pointing stability to be less than 10μrad,whichmeets the high stability requirements of the extreme ultraviolet(EUV)lithography for the CO2laser source under the Laser Produced Plasma(LPP)system.
extreme ultraviolet source;CO2laser;parametermonitoring;pointing control
TN248.2;TP273
A
10.3788/CO.20130604.0544

姜振华(1984—),男,吉林长春人,硕士,研究实习员,2011年于哈尔滨工业大学获得硕士学位,主要从事光束控制、自动控制等领域的研究。E-mail:pily09@163.com

郭 劲(1964—),男,吉林长春人,研究员,博士生导师,2007年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事光电测控与光电对抗技术研究。E-mail:guojin1964@126. com

王挺峰(1977—),男,山东文登人,副研究员,硕士生导师,2005年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事光电测控与光电总体技术研究。E-mail:wtfeng@sina. com
1674-2915(2013)04-0544-07
2013-04-11;
2013-06-17
吉林省重大科技攻关专项(No.20120615)
