全自动椰子剥衣机
2013-03-20张瀚卿龙亮亮
张瀚卿 龙亮亮 张 燕
(海南大学机电工程学院,海南 海口 570228)
椰子作为中国主要的经济作物之一,是一种大型的棕榈科植物,其树高可达20 m 以上,叶长可达6 m,主要产于华南热带的沿海地区。椰子果肉有很高的营养价值,可制成各种营养丰富的椰子类食品。椰子水主要用于生产椰鲜果(也称纳塔),富含糖、矿物质、蛋白质、氨基酸及其他微量成分。椰纤果的用途广泛,不仅可以作为添加剂和新型食品加工半成品,还可作为新型生物材料。椰子壳表面坚硬,受撞击时易裂开。果仁俗称椰肉,为椰壳所包覆,可供食用[1]。椰子作为多年生的热带木本油料作物和食品能源作物,具有很高的综合经济价值,在医疗、卫生、保健、食品等行业均有应用。
目前中国椰子加工企业有300家左右,但是大部分企业加工量比较小,未能形成产业化规模化[2]。少数如海南天际、春光等具有一定规模的专业化的椰子综合加工企业也仅仅是实现了椰子加工后续工序的机械化。椰子加工的第一步都是去掉外壳。因为椰子的外衣非常厚实,所以去掉椰衣后有利于椰子的运输和后续加工。海南的椰子剥衣工作主要靠工人手工或借助简单的工具完成。这种手工剥除椰衣劳动强度大,效率低,费时费工,而且危险性很大[3]。
目前,国内外有许多相关机构和人员都在从事椰子剥衣这方面的研究,并且取得了很大的进展。比如,有利用六角刀具扎入椰衣旋转剥开椰衣的自动剥衣机[4]。虽然传感器和计算机技术以及液压技术的应用能使机器的自动化程度得到较大的提高,但是这些技术在椰子剥衣机方面的应用还较少[5]。而且这些椰子剥衣机在工作的过程中都必须要有工人的参与,没有办法实现完全的自动化。因此设计一种全自动的椰子剥衣机,运用工业流水线式的加工方式对椰子进行加工,不仅能够提高椰子剥衣速率,还能够减少椰子剥衣的损伤率,减少在剥衣过程中对工作人员的伤害。本试验的设计全部由PLC控制。
1 全自动剥衣机的工作原理
1.1 总体设计思路
采用工业上常用的流水线生产方式,将椰子的整个剥衣过程分成3个部分:上料、剥衣、卸料,这3个工位加工部件分别固定在一个大圆盘对应的位置上,在大圆盘上安装分度盘,来控制圆盘按角度旋转。并且在同一圆周上安装3个三角卡盘,每两个卡盘之间成120°(见图1),用来保证3个工位的加工同时进行,提高加工效率。当椰子完成一个加工后,控制电机,让转盘转动120°进行下一次的加工。在整个过程中,全部由PLC程序控制,只需要提前输入程序,就可以让整个加工过程自动进行。这样既可以完全省去人员的劳动力,也可以提高椰子剥皮的效率。
1.2 上料装置和卸料装置
工业机械手是近年来自动控制领域中出现的一种新型技术,已成为现代制造生产系统中不可缺少的组成部分[5]。机械手可以完成如搬物、装配、切割、喷染等多种作业,应用面非常广泛。目前,中国机械手的发展非常迅速,功能越来越先进,灵活性也越来越高。
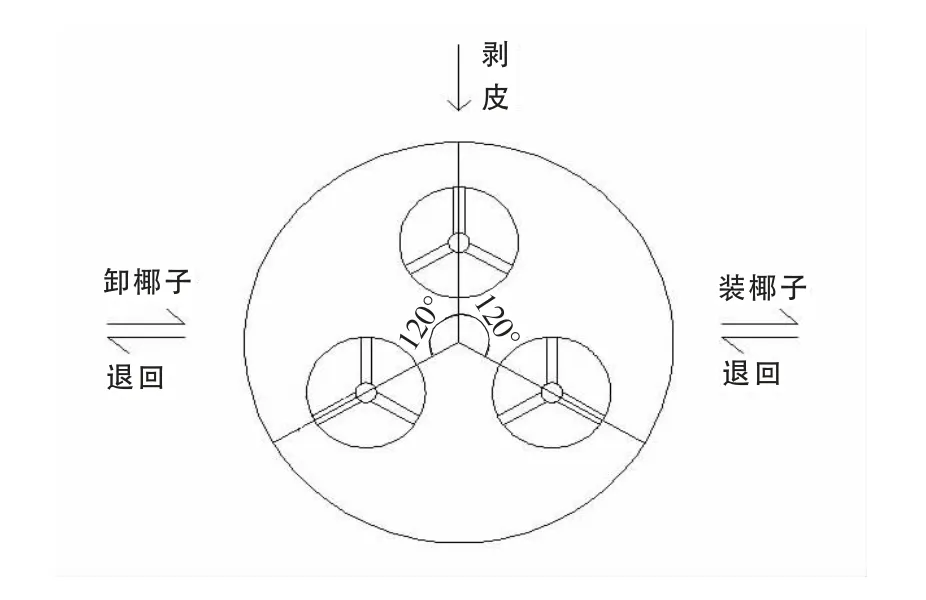
图1 椰子衣加工过程示意图Figure1 The Schematic diagram of working process
上料装置和卸料装置都用机械手来控制,这里采用简单的气压控制式机械手[6](见图2)。在第一工位时,机械手从放料箱中取出椰子,并且将椰子放在第一转盘上的三角卡盘上,在第三工位时,机械手主要将椰子从转盘上取下来放在收集箱中。在两个过程中机械手的运动相同,因此可以采用同一类型的机械手控制。
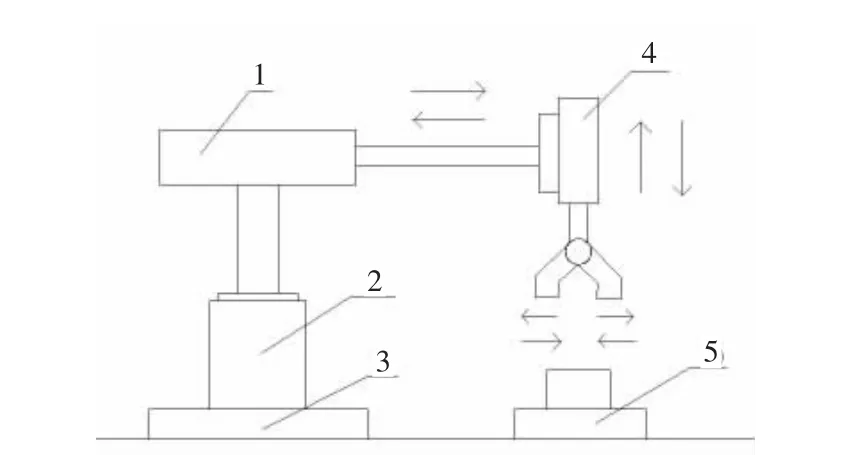
图2 机械手加工过程示意图Figure2 The Schematic diagram of manipulator’s work process
机械手的初始位置停止在原点,启动按钮打开后,机械手将依次完成下降——加紧椰子(定时1s)——上升——顺时针旋转180°——下降——松开椰子(定时1s)——上升——逆时针旋转180°的过程。由相应的限位开关来控制。夹紧和放松动作则有气压上的M 型三位五通型电磁换向阀控制。
1.3 椰子剥皮装置
在以往的设计中因为椰子大致是椭圆形的。为了让刀具沿着剥皮机的外轮廓走,需要人工控制刀具的进给,尤其是在剥衣机上进行剥皮的时候。在原有椰子剥衣机的基础上进行改良,用涡轮蜗杆机构来控制刀具的下降和旋转,用一个电机控制整个剥衣过程。
整体的设计如图3所示。
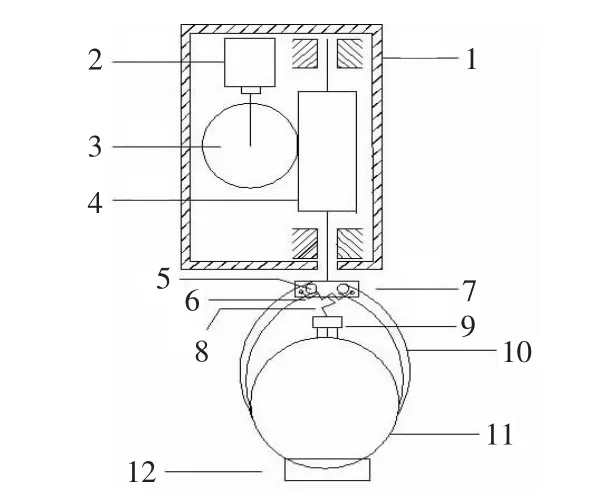
图3 椰子剥衣机的机构简图Figure3 Coconut shell dryer’s structure diagram
椰子剥机的基本工作原理:当椰子转到第二工位后,电动机正转打开,带动涡轮转动,通过涡轮与蜗杆的啮合作用,带动蜗杆向下运动并且转动。在蜗杆轴上安装有刀具盘,刀具盘通过键槽安装在蜗杆轴上。刀具盘上通过铰链与6把刀具连接。刀具与刀具之间通过弹簧连接在一起。刀具盘的下方用弹簧连接有三脚顶针。开始时刀具顶尖和三足顶尖处于同一水平面上(见图4),当刀具下降到碰到椰子的时候三脚顶针通过弹簧弹力的作用将椰子固定住。刀具碰到椰子后在压力的作用下被分开,边旋转剥皮,边下降。当刀具下降到一定位置碰到行位开关后。电动机开始反转。蜗杆向上运动,刀具收回,直到碰到行程开关后电动机停止。在整个椰子剥皮的过程中,在第二工位旁边安装空气动力压缩机,将剥下来的椰衣从工作台上吹下来。

图4 刀具盘处的设计Figure4 The design of tool tray
1.4 刀具的设计
椰子由外果皮、中果皮、内果皮、种皮、种仁(胚乳)、胚、椰子水等部分构成。外表皮光滑,与中果皮相连接;中果皮俗称椰衣,为厚而疏松的棕色纤维层,不易剥除;外果皮俗称椰壳,呈黑褐色。因为主要要求去除椰子的外表皮和中果皮,大部分是纤维层。所以这里刀具不采用平刃,而采用锯齿刃。通过实践研究得出结论,在对切割绳索等软性物料时,锯齿刃比平刃快。椰衣是纤维状的,椰衣和椰壳的硬度不一样,刀具采用锯齿形刀具,这样能保证在不损坏椰子内壳的情况下剥衣。椰子是圆形的,为了保证大部分的椰衣都能被剥掉,这里用带有一定弧度的刀具。
2 软件设计
2.1 总程序的设计
PLC 由微处理器(CPU)、输入输出(I/O)模块、存储器(EPROM、ROM)、外设I/O 接口、电源等组成。其中各个部分又通过总线(电源总线、地址总线、控制总线、数据总线)连接[7]。分析椰子剥衣整体过程,得出椰子剥衣的整体流程图见图5。

图5 全自动椰子剥衣机的流程图Figure5 The flow chart of Automatic coconut shell dryer
2.2 PLC的选用及I/O 口的分配
本设计采用三菱公司生产的FX2NX系列中的FX2N-32M 型。FX2N 系列可编程控制器具有很强的抗干扰能力和很高的可靠性,对工作电源没有特殊的要求,适用于普通的工业环境,因而选用此类型的PLC。FX2N 系列的PLC具有指令功能完善、储存容量大、运行速度快等特点,它能完成逻辑位置控制、模拟量控制、数据排列、数据检索、顺序控制、平方根以及浮点数运算、三角函数运算等多项功能[6]。可见所选的PLC满足要求,I/O 口的分配如表1所示。
每个卡盘上只有1个工位上有工件检测装置压力继电器X2,在另外2个工位上没有其他的检测装置。这里采用的是为3个工位设置3 个标志,分别用辅助继电器M10~M12控制。当第一工位上的检测装置检测到工件存在时设置M10为1,转盘转动后,用左移指令FNC32RCL 将M10~M12左移一个位元。这样3个工位的启动辅助继电器控制机器的运行。这样可以避免发生空工位的现象。
PLC控制的顺序功能图见图6。
用P10代表子程序符号。因为在装、卸椰子时机械手的运动基本上相同,程序也相同,可以用同一个程序控制。为了使程序简单清晰,这里将机械手的程序编写子程序。在主程序执行的过程中用子程序调用指令FNC01CALL 配合FNC02SRET 指令使用一起调用子程序。
机械手的控制程序见图7。

表1 I/O 口的分配Table1 The assignment of I/O ports
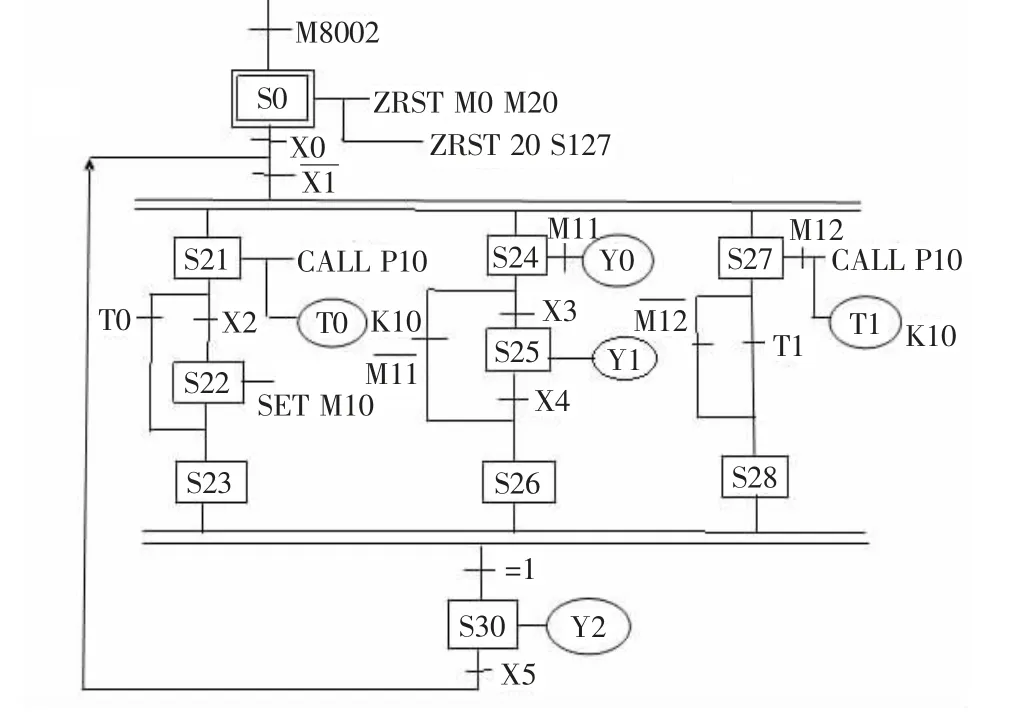
图6 主程序顺序功能图Figure6 The Sequential Function Chart of main process

图7 机械手的控制程序Figure7 The control program of manipulator
3 主要技术参数
椰子整个剥衣过程中,电机功率选为2kW,蜗杆模数选用m =8,分度圆直径90mm,完全由PLC程序控制,3个工位可以同时工作,这样可以大大提高生产效率,减少劳动力。对由于椰子品种差异和含水量造成的形状、硬度不同,都能够完成工作任务。根据实体样机验证,该剥衣机可剥衣300多个以上,并且损伤率控制在5%以内。比前人[8]研究的剥衣机更简单,故障率更低。
用于大批量的椰子生产,将机械和电子紧密结合在一起,实现椰子剥衣过程的全自动化。将椰子的上料,剥皮,卸料在一个工艺中完成。这样不仅可以减少劳动力,而且便于工厂的统一化生产。同时,如果要进行椰子的其他加工,例如椰子打孔,也可以使用本研究的系统设计。
1 李秀娟,李小慧.新鲜椰子的综合加工[J].食品科技,1999(1):47~49.
2 肖红,易美华.椰子的开发利用[J].海南大学学报(自然科学版),2003,6(2):183~189.
3 赵松林.椰子综合加工技术[M].北京:中国农业出版社,2007:35~42.
4 肖仁鹏,马鑫,刘四新,等.椰子自动剥衣机的设计[J].食品与机械,2012,28(1):142~143.
5 尚江坤,张燕.椰子剥衣机研制的现状和展望[J].安徽农业科学,2012,40(6):3 803~3 805.
6 黄伟,胡青龙.机械手PLC 控制系统的设计[J].机电工程技术,2008(37):11.
7 廖常初.PLC 的顺序控制编程方法[J].工业自动化(香港),1997(8):153~156.
8 张旭飞,张燕,梁栋.基于PLC 的椰子切割机的设计与控制研究[J].农机化研究,2012(3):199~202.
