盾构机密封舱土压平衡综合优化控制
2013-03-20刘宣宇
刘宣宇,邵 诚,栗 觅
(1.辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001;2.大连理工大学 先进控制技术研究所,辽宁 大连 116024;3.北京工业大学 国际WIC研究院,北京 100124;4.辽宁石油化工大学 计算机与通信工程学院,辽宁 抚顺 113001)
0 引 言
盾构机是一种地下隧道开挖的专用工程机械,主要由盾体、刀盘系统、推进系统、排渣系统、管片拼装系统、同步注浆系统以及盾尾密封系统等构成,广泛适用于地铁隧道、矿山巷道、城市市政隧道等各种地下工程[1].密封舱土压平衡控制是盾构技术中最关键的技术之一,土压控制不当将引起开挖面失稳,导致地表隆起、塌陷甚至灾难性事故的发生.现有的土压平衡控制方法主要是操作者凭经验调节推进速度或螺旋输送机转速[2].对于密封舱土压平衡的自动控制,国内外学者也进行了一些相关的理论研究,但研究成果相对较少.Yeh[3]采用BP神经网络构建了盾构土压平衡控制系统.陈立生等[4]针对密封舱压力控制标准的不确定性,提出以土压平衡比为辅助方法来控制密封舱土压平衡.文献[5]利用自适应模糊神经网络(ANFIS)建立了以螺旋输送机转速为输出的盾构土压平衡控制系统.文献[6]设计了一种模糊免疫自调整PID 控制器,应用于具有时变、时滞的非线性土压平衡仿真控制系统中,实验证明系统具有良好的动态特性和稳定性.文献[7]在假设土仓内渣土为理想的塑性材料前提下,以刀盘进土体积与螺旋输送机排土体积相平衡为基础,分别建立了推进速度和螺旋输送机转速的控制模型.文献[8]利用微型盾构模型进行试验研究,揭示了密封舱压力、总推力、螺旋输送机转速以及刀盘扭矩等参数之间的关系.文献[9]根据盾构排土过程的机理分析建立了密封舱压力控制模型,采用系统辨识方法识别模型中的参数,并给出了螺旋输送机转速的优化控制方法,最后利用模拟试验台验证了方法的有效性.文献[10]提出了一种基于LS-SVM 和PSO 相结合的土压平衡优化控制方法,通过实时优化推进速度和螺旋输送机转速实现了盾构土压平衡的优化控制.文献[11]基于改性后渣土的非线性本构关系,建立了以螺旋输送机转速为操纵变量的盾构机土仓压力控制模型.
以上研究表明,目前盾构施工还难以通过刀盘、推进和排渣等多子系统综合协调来实现密封舱压力的高效平衡控制.但密封舱压力是由刀盘系统、推进系统和排渣系统等多子系统相互耦合作用所决定的,为了实现在不同地质条件及工况下开挖面稳定的准确高效控制,实施多子系统协调优化控制以使各子系统以最优的方式运行是十分必要的.为此,本文基于地层识别系统,提出专家系统控制和非线性预测控制相结合的刀盘、推进和排渣等多子系统的综合优化控制方法.
1 土压平衡综合优化控制系统的设计
盾构机的土压平衡控制主要由刀盘系统、推进系统和排渣系统来完成,综合优化协调控制这3个子系统的关键在于调节刀盘转速、推进速度以及螺旋输送机转速.刀盘是盾构机的关键部件之一,其主要功能是开挖、稳定和搅拌.因为整个施工过程中掘进断面的土质状况变化范围大,刀盘驱动的工况很复杂,刀盘的切削扭矩及转速的变化很大,但通常刀盘转速的调节规则是:土质条件不变时,即使刀盘扭矩有较大变化,刀盘转速保持稳定;土质条件改变时,刀盘转速可调.为调整刀盘转速,同时调整推进速度与螺旋输送机转速来协调控制这3个系统以使密封舱土压平衡,本文基于地层识别系统设计了密封舱土压平衡的综合优化协调控制系统,控制系统结构如图1所示.图中T表示刀盘扭矩,F为盾构总推力,vc为刀盘转速,va为推进速度,vs表示螺旋输送机转速,v*c(k)、v*a(k)和v*s(k)分别表示k时刻由综合优化控制器给出的各参数的优化设定值,p表示检测的密封舱压力值.
综合优化控制系统主要由地层识别系统、综合优化控制模块、刀盘系统、推进系统和排渣系统组成,其中综合优化控制模块主要由专家决策系统和预测控制器组成,来协调优化控制刀盘、推进和排渣3个子系统,完成对刀盘转速、推进速度和螺旋输送机转速的优化设定工作.地层识别系统对地层状态进行识别,其结果作为刀盘控制系统的决策依据.专家决策系统根据地层识别的结果,结合专家经验给出与地层相适应的刀盘转速v*c(k).在刀盘转速确定的前提下,利用非线性预测控制算法计算出与刀盘转速相适应的推进速度v*a(k)和螺旋输送机转速v*s(k),实现密封舱土压平衡的刀盘、推进和排渣3个子系统的协调优化控制.在基于模型的非线性预测控制算法中,采用LS-SVM 建立了密封舱土压预测模型,并且基于ACS算法实现了推进速度和螺旋输送机转速的滚动优化.

图1 盾构机土压平衡综合优化控制系统结构图Fig.1 Structure of the integrated optimization control system of EPB shield machine
2 地层识别
由工程实践可知,刀盘扭矩T、推进速度va、推力F和刀盘转速vc能反映出开挖面地层的变化情况.因此,定义了扭矩切深指数TPI和场切深指数FPI,对数据样本进行分类,在此基础上对地层进行判断.TPI和FPI分别定义如下[12]:

式中:Prev为刀盘刀具的切深.
TPI和FPI分别表示单位切深所需的扭矩和推力,反映了刀盘与开挖面土层的切向和法向作用的本质,能够表征前方土层对掘进性能的影响.
以砂土、黏土、砂砾土为对象,利用各种地质情况下的现场施工数据刀盘扭矩、推进速度、推力和刀盘转速经过二次变换,转换为特征输入参数TPI和FPI,令x=FPI,y=TPI,则构成了反映地质特性的特征空间,特征参数的分布具有显著差异,基本分布在了以直线为边界的砂土区、黏土区、砂砾区3个区域.为了进一步判定每一种地层的土质特性,对每个区域内的特征参数进行二次分类.这里,引入了贴近度的概念,参数点Di(xi,yi)与相对应直线的贴近度可由下式计算[12]:

式中:yaj为特征参数空间分布的边界直线,djD为参数点到相应直线的距离.因此,由贴近度可以进一步判断土层的特性如下:
(1)当yi>ya1(xi)时,若贴近度n(Di,ya1)趋近于1,则认为盾构掘进的地层基本正常,而n(Di,ya1)越小,则扭矩表现为异常大,说明盾构很可能遇到了裹挟性地质.
(2)当ya2(xi)≤yi≤ya1(xi)时,说明盾构处于正常掘进状态.此时,若yi<ya3(xi),则贴近度n(Di,ya3)越小,表明开挖面土层越软;若yi≥ya3(xi),则n(Di,ya3)越小,表明土层越硬.
(3)当yi<ya2(xi)时,若贴近度n(Di,ya2)趋近于1,则认为盾构掘进的地层基本属于正常,而n(Di,ya2)越小,则表明推力越大,说明盾构可能遇到了加固土层或者强障碍.
3 盾构机多子系统综合优化控制策略
3.1 基于专家系统的刀盘转速控制
由于地质条件的复杂多变以及土体的各向异性等因素的影响,至今尚未得到工程界普遍认可的盾构开挖面土体的本构模型,这也是岩土工程界的一大难题.同时,盾构刀盘负载实时变化,很难用一个精确的数学模型来表示.因此,经典或先进的控制理论都无法较好地应用于盾构机刀盘的实时控制.但熟练的盾构操作者可以根据当前的地质变化情况以及掘进参数的变化等做出正确的决策判断,使掘进控制系统与刀盘的负载变化相适应.因此,本文采用基于地层状态识别与专家系统控制相结合的控制策略,克服了隧道沿线地质勘测的粗略预报以及盾构操作者人为因素导致的误操作等缺点.刀盘转速的专家控制系统主要由知识库、推理机、动态数据库、检测系统等组成,控制系统结构如图2所示.
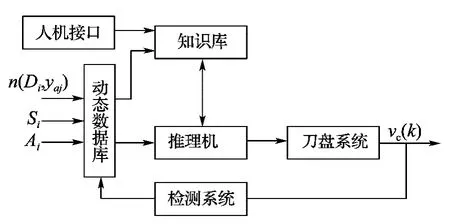
图2 刀盘转速专家控制系统结构图Fig.2 Structure of expert control system of cutter speed
(1)知识库
知识库主要由控制规则集、专家现场施工经验、各种国家标准以及专门知识等组成.在该系统中,假设Sa、Sb、Sc分别代表黏土、砂土和砂砾土,Ai(i=1,…,4)代表数据点在参数空间所属的区域,采用产生式规则来表示知识[13],即
if〈(土质),Ai,(n(Di,yaj))〉then〈v*c(k)〉
根据盾构实际掘进过程中刀盘转速的控制经验,部分控制规则列举如下:


(2)动态数据库
动态数据库存放各种实时检测的输入、输出数据,各种参数的设定值和性能指标,系统运行过程中的各种特征参数等.
(3)推理机
根据动态数据库提供的信息以及知识库的知识规则,采用正向推理的方法,进行搜索匹配,判断推理,提取相应的规则,最后给出刀盘转速的控制策略.
专家系统接收输入的土质、所在分区Ai及相应的贴近度n(Di,yaj)的量化参数,推理机根据一定的推理规则从知识库中选择相关的知识,对输入数据进行推理,最后给出与地层特性相适应的刀盘转速.在知识库中,随着地质条件、施工参数等的改变,原来可用的专家规则可能会变得不再适用于对象,因此需要对规则库进行实时更新,以保证专家系统能获得对象的变动信息,给出正确可用的结果.
3.2 推进速度和螺旋输送机转速的非线性预测协调控制
盾构机在掘进过程中,刀盘旋转开挖前方土体,切削下来的泥土充满密封舱和螺旋输送机内部的全部空间,由推进液压缸推动盾构前行,同时将推力通过承压隔板传递给密封舱内的泥土,加上土体本身自重产生的侧向压力,二者共同提供支护压力以平衡开挖面的水土压力;盾构机在开挖的同时由螺旋输送机将密封舱内的泥土排出盾体,维持进土量和出土量平衡,以此来控制密封舱土压和开挖面的土压平衡.因此,密封舱压力不仅与掘进过程中的应力场、温度场、渗流场等多场耦合作用密切相关,而且还受到推进速度与排渣速度等因素的影响,是由推进系统、排渣系统、刀盘系统等多子系统综合作用的结果.因此,盾构掘进过程是高度非线性的复杂力学过程,难以建立完善的机理模型.基于结构风险最小化的支持向量机(SVM)回归能够很好地解决非线性、小样本、高维数以及局部极小等问题,具有较强的泛化能力.而最小二乘支持向量机(LS-SVM)是标准SVM 的一种扩展,它将SVM 的二次规划问题转化为求解线性方程组,大大简化了计算的复杂度.因此,为了实现密封舱土压的动态平衡控制,本文采用LS-SVM 方法建立了在线密封舱土压预测模型.
(1)LS-SVM 土压预测模型的建立
考虑如下非线性回归模型:
其中m、n是系统的输入输出阶次.本文控制系统的控制输入为螺旋输送机转速vs(k)、推进速度va(k)和 刀 盘 转 速vc(k),即u(k)= (vc(k)va(k)vs(k));输出为密封舱内监测点的压力p(k).根据文献[14]设该系统为二阶系统,即m=n=2,所以,引入如下回归变量:

在每一时刻实时采集新的数据,更新训练集,并用上一时刻的KKTk条件对新增数据进行测试,若新增数据满足KKTk条件,不必重新训练建模;否则,利用新样本集对模型进行重新训练建立新的土压预测模型[10].
(2)反馈校正及参考轨迹
由于掘进过程各种不确定因素的影响,模型的预测输出与实际值总是存在一定的误差.为了减小误差产生的影响,需要对预测模型进行反馈校正,对预测输出进行补偿.在k时刻模型的预测误差为

所以,在预测时域n内,经过反馈校正的模型预测土压为

其中p(k+j|k)为模型预测输出土压,pp(k+j|k)为经反馈校正后的模型输出土压.
为了使系统的输出能够按照预期逐渐地光滑过渡到设定值,避免大的超调出现,这里引入了参考轨迹,采用当前时刻实际输出土压值p(k)为起始的一阶指数变化形式来描述:

式中:pr(k+j)是输出的参考轨迹,ps(k+j)是密封舱土压的设定值,α=exp(-T/τ),T是采样时间,τ是参考轨迹的时间常数,j是预测步长.
(3)基于改进ACS算法的滚动优化
滚动优化的目标函数为
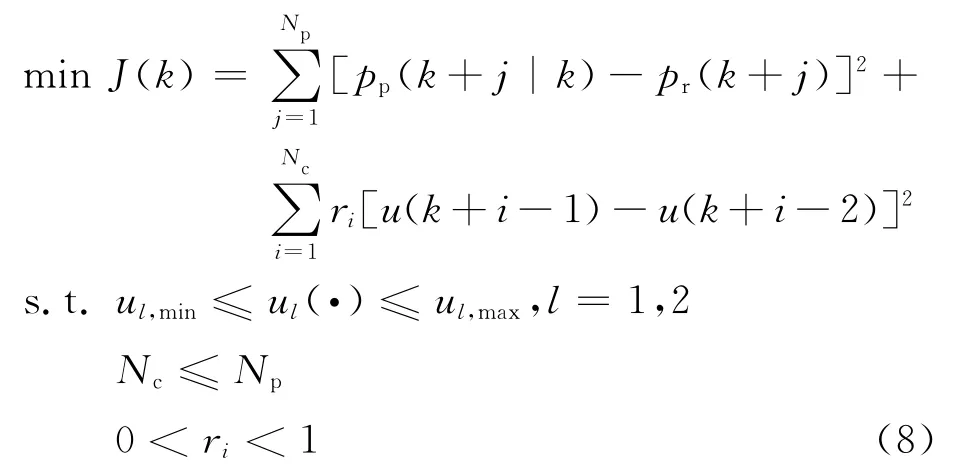
式中:ul(·)(l=1,2)分别代表螺旋输送机转速vs和推进速度va,即u(k)=(vs(k)va(k))T,ul,min、ul,max分别表示其最小值与最大值,ri≥0为加权系数,Np是预测时域,Nc是控制时域.
由于优化函数(8)属于有约束的非线性问题,采用传统的数值优化方法很难对其进行求解.然而,蚁群算法调整参数少,易于计算,且非常适用于求解复杂的非线性优化问题[16].为了使优化速度更快,并加大全局搜索最优解的力度,本文将蚁群算法进行了改进,用于求解最优的推进速度和螺旋输送机转速;同时为了尽量减少优化时间,在预测控制算法中取预测时域Np=1,即预测控制器进行单步预测.
改进的蚁群算法的主要思想是:在每一次迭代过程中,每只蚂蚁独立地选择一条路径,每条路径代表一组控制序列,然后将控制序列作用于预测模型,得到一组预测输出,再将这些值代入优化函数(8)中,得到目标函数值.算法根据这些目标函数值更新信息素,然后进入下一次迭代,当所有的蚂蚁都收敛到同一路径或者达到最大迭代次数,算法结束.算法主要步骤如下:
(1)搜索路径
控制变量u(k)代表k时刻的螺旋输送机转速v*s(k)和推进速度v*a(k).由于螺旋输送机转速一般在0~22.4r/min,而推进速度一般都小于100 mm/min,将其范围限定在0 ~99.9 mm/min,也可以根据实际情况进行调整.因此,每一个控制变量都由3位有效数字表示,设小数点前后分别为2位和1位,其节点和路径分布如图3所示.横坐标xi第1 ~3、4 ~6 分别代表u(k)的各个数位,其中第1~3位表示螺旋输送机转速v*s(k),而4~6位表示推进速度v*a(k).纵坐标yij的0~9分别代表每个数位上可能取的值,而由于螺旋输送机最大转速的限定,L1仅取0、1、2.用(xi,yij)表示在Li上的节点j的值yij.蚂蚁从起始点0开始,每向前一步都要从下一条直线Li选择一个节点作为目标前进,直到经过所有直线L1,L2,…,L5,最后到达L6,完成一次循环,它的移动路径可以表示为Path={0,(x1,y1j),(x2,y2j),…,(x6,y6j)}.
所以这条路径所对应的控制变量的值可以表示为

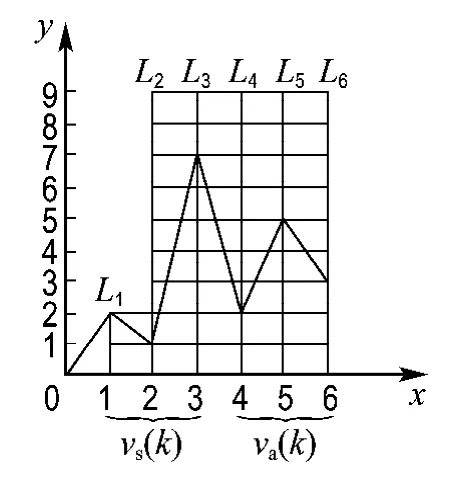
图3 蚂蚁搜索路径Fig.3 The searching path of the ants
(2)节点的选择
蚂蚁在行进过程中,根据各条路径上的信息量决定转移方向.pkij(t)表示蚂蚁k在t时刻由位置i转移到j的概率:

式中:τ(xi,yij,t)为在t时刻节点(xi,yij)的信息素浓度,allowedk是下一步允许选择的节点集合,α是信息素浓度的权重系数.
(3)信息素的更新
经过n个时刻所有蚂蚁完成一次循环后,对所经过路径上的节点进行信息素更新:

其中ρ(0<ρ<1)是挥发因子,τ(xi,yij,0)=τ0,Δτ是节点信息素的增量,Q是常数,Fk是所得控制量作用于系统后所对应的目标函数值.为了避免算法过早地收敛于局部最优解,每条路径上的信息素浓度限定在[τmin,τmax].
4 仿真研究
采集了广州某地铁隧道的施工数据进行仿真实验.首先利用现场数据建立密封舱土压预测模型.利用LS-SVM 建立密封舱压力的预测模型,采集400组施工数据{Xi(k),pi(k+1)},300组作为训练集,100组作为测试集.经测试确定参数σ2=0.4,C=10,利用数据样本进行训练建模,并将其作为土压预测模型应用于下面的预测控制算法.用于滚动优化的蚁群算法中参数的选择对算法性能至关重要,但对于选择的方法和原则目前尚无确切的理论依据.通过经验和试算最后确定蚁群 算 法 的 参 数 如 下:α=1,ρ=0.65,τmin=0.002,τmax=1.在预测控制算法中ri=0.8,Np=3,Nc=1.
以文献[17]所建立的盾构机密封舱土压模型作为被控对象进行仿真研究,模型如下:

式中:T(·)表示密封舱土压值,vt为推进速度,vs为螺旋输送机转速,vh为刀盘转速,F为总推力.为了更好地检验系统的控制性能,选用砂土和黏土两种地质情况下的数据进行仿真实验.在砂土和黏土中模型参数分别为砂土:a=0.005 6,b=0.042 8,c=0.002 1,d=0.005 3,e=0.002 6,f=0.001 1,g=0.009 8,h=1.062 0;黏土:a=0.003 1,b=0.054 7,c=0.004 9,d=0.004 7,e=0.002 9,f=0.000 6,g=0.013 5,h=0.653 0,推力F根据实际工况确定.假设盾构机是在砂土与黏土交互式的地层中前进,在前250s是在砂土中掘进,在250~500s是在黏土中掘进,而在500~750s又在砂土中掘进.采集的数据包括密封舱压力、螺旋输送机转速、推进速度、刀盘转速、推力、扭矩,采样周期为5s.控制参数刀盘转速v*c(k)、螺旋输送机转速v*s(k)、推进速度v*a(k)的协调优化控制结果如图4~6所示,密封舱土压平衡的控制效果如图7所示.
从图4可以看出,在同一种地质情况下,刀盘转速产生了波动,反映地层的土质状态确实发生了变化,这体现了地层识别系统与专家系统相结合进行地层辨识和判断的优点;而螺旋输送机转速和推进速度在不同的地质条件下也发生了相应的变化,如图5、6所示.从图7的土压平衡控制效果可以看出,本文方法能够使密封舱土压很好地跟踪设定的土压值,效果明显好于现场实际监测的人工凭经验的控制结果.尤其在地层情况发生变化时,系统能够很快识别并适应地层的变化,综合协调优化各子系统,使掘进控制变量得到了实时优化,说明系统具有较好的协调优化控制能力,能够高效地控制密封舱土压平衡.

图4 优化后的刀盘转速Fig.4 Cutter speed after optimization
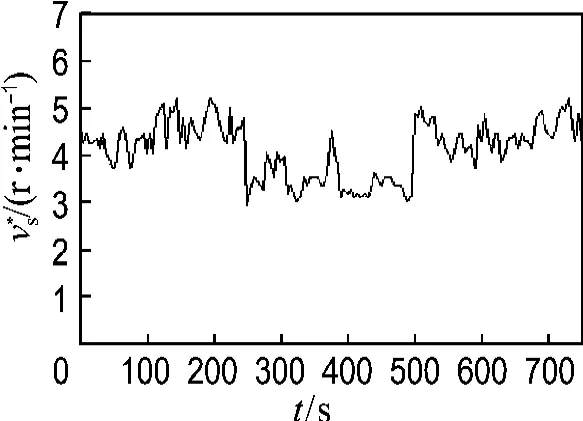
图5 优化后的螺旋输送机转速Fig.5 Screw conveyor speed after optimization

图6 优化后的推进速度Fig.6 Advance speed after optimization

图7 综合优化控制效果与实际效果对比Fig.7 Contrast between the integrated control effect and actual one
5 结 论
为了使掘进控制参数在施工过程中能够得到实时调整和优化,盾构机以最优的方式控制各子系统运行以达到密封舱土压动态平衡的目的,本文提出了盾构机刀盘、推进和排渣多子系统的综合优化控制方法,并利用隧道现场的施工数据进行了仿真验证.仿真实验结果表明,该方法能够在盾构掘进过程中根据地层变化调整刀盘转速,并实时协调优化推进速度和螺旋输送机转速.从密封舱土压平衡的控制效果可以看出,密封舱压力能够较好地与设定值吻合,控制精度较高,即使在地层发生变化时,系统也能够快速识别并自适应地层的变化,并有效控制密封舱土压平衡,表明本文提出的盾构机刀盘、推进、排渣等多子系统的综合优化控制方法是合理有效的.
[1] 张凤祥,朱合华,傅德明.盾构隧道[M].北京:人民交通出版社,2004.ZHANG Feng-xiang,ZHU He-hua,FU De-ming.Shield Tunnel[M].Beijing:China Communication Press,2004.(in Chinese)
[2] 张庭华.土压平衡盾构土舱压力控制技术研究[J].铁道标准设计,2005(8):83-85.ZHANG Ting-hua.Study on the earth pressure control technology in chamber of EPB shield machine[J].Railway Standard Design,2005(8):83-85.(in Chinese)
[3] Yeh I C.Application of neural networks to automatic soil pressure balance control for shield tunneling[J].Automation in Construction,1997,5(5):421-426.
[4] 陈立生,王洪新.土压平衡盾构平衡控制的新思路[J].上海建设科技,2008(5):18-21.CHEN Li-sheng,WANG Hong-xin.New idea about balance control for earth pressure balance shield [J].Shanghai Construction Science &Technology,2008(5):18-21.(in Chinese)
[5] 施 虎,龚国芳,杨华勇.盾构掘进土压平衡控制模型[J].煤炭学报,2008,33(3):343-346.SHI Hu,GONG Guo-fang,YANG Hua-yong.Control model of earth pressure balance for shield tunneling[J].Journal of China Coal Society,2008,33(3):343-346.(in Chinese)
[6] LI Xiao,CHEN Zhen-huan.Fuzzy immune control for shield′s earth-pressure-balance simulation system [C]//Fourth International Conference on Natural Computation.Jinan:IEEE Computer Society,2008:648-652.
[7] YANG Hua-yong,SHI Hu,GONG Guo-fang,etal.Earth pressure balance control for EPB shield[J].Science in China Series E:Technological Sciences,2009,52(10):2840-2848.
[8] XU Q W,ZHU H H,DING W Q.Laboratory model tests and field investigations of EPB shield machine tunneling in soft ground in Shanghai[J].Tunneling and Underground Space Technology,2011,26(1):1-14.
[9] 李守巨,屈福政,曹丽娟,等.土压平衡盾构机密封舱压力控制实验研究[J].煤炭学报,2011,36(6):934-937.LI Shou-ju,QU Fu-zheng,CAO Li-juan,etal.Experimental investigation about chamber pressure control of earth pressure balance shield[J].Journal of China Coal Society,2011,36(6):934-937.(in Chinese)
[10] LIU X Y,SHAO C,MA H F,etal.Optimal earth pressure balance control for shield tunneling based on LS-SVM and PSO [J].Automation in Construction,2011,20(4):321-327.
[11] 李守巨,曹丽娟.盾构机土仓压力控制模型及其参数辨识[J].煤炭学报,2012,37(2):206-210.LI Shou-ju,CAO Li-juan.Pressure control model on soil chamber of shield machine and its parameter identification[J].Journal of China Coal Society,2012,37(2):206-210.(in Chinese)
[12] 邢 彤,赵 阳.盾构掘进土层识别及刀盘转速控制策 略 研 究 [J].浙 江 工 业 大 学 学 报,2010,38(6):649-654.XING Tong,ZHAO Yang.Earth layer recognition during the shield machine digging and control strategy of the cutter head speed [J].Journal of Zhejiang University of Technology,2010,38(6):649-654.(in Chinese)
[13] 阳春华,沈德耀,吴 敏,等.焦炉配煤专家系统的定性定量综合设计方法[J].自动化学报,2000,26(2):226-232.YANG Chun-hua,SHEN De-yao,WU Min,etal.Synthesis of qualitative and quantitative methods in a coal blending expert system for coke oven [J].Acta Automatica Sinca,2000,26(2):226-232.(in Chinese)
[14] 李 笑,陈振环,陈烘陶.盾构土压平衡电液模拟系统的研究[J].机床与液压,2006(7):129-131.LI Xiao,CHEN Zhen-huan,CHEN Hong-tao.Study on electro-hydraulic simulation system of earth pressure balance of tunnel boring machine[J].Machine Tool & Hydraulics,2006(7):129-131.(in Chinese)
[15] Suykens J A K,Vandewalle J.Least squares support vector machine [J].Neural Processing Letters,1999,9(3):293-300.
[16] Dorigo M,Maniezzo V,Colorni A.Ant system:optimization by a colony of cooperating agents[J].IEEE Transaction on Systems,Man and Cybernetics,1996,26:28-41.
[17] 刘任喜.基于LS-SVM 的盾构密封舱土压建模仿真研究[D].大连:大连理工大学,2009.LIU Ren-xi.Modeling and simulation of shield sealed cable′s earth pressure based on LS-SVM[D].Dalian:Dalian University of Technology,2009.(in Chinese)
