考虑目标重要性及历史任务信任度的无人机任务决策方法
2013-02-23黄长强唐传林黄汉桥王勇杜海文
黄长强,唐传林,黄汉桥,王勇,杜海文
(空军工程大学 航空航天工程学院,陕西 西安710038)
0 引言
近年来,随着国内无人机领域的快速发展,以无人机(UAV)协同作战相关内容的研究工作已经广泛地开展,并取得很多研究成果。任务决策是多UAV 协同任务规划的重要组成部分,随着未来UAV的规模、执行任务的能力以及任务的复杂性和多重耦合性的增加而更显重要。
多UAV 协同任务决策问题有很多求解方法。例如,遗传算法[1]、合同网[2]、贝叶斯算法[3]、线性规划[4]、粒子群算法[5]、蚁群算法[6]、分布式拍卖算法[7]等,这些文献对多UAV 任务决策进行了研究,但是都没有考虑UAV 的历史任务完成情况,没有对UAV 的任务信任度进行评估,在实时环境中,不能为UAV 执行后续任务提供可信的决策支持。现有的大多数方法基于任务的耦合性和次序性进行研究,将环境因素的影响理想化。文献[8 -9]虽然考虑了环境因素,但只是将目标的机动或者突现作为不确定条件看待,而对目标的重要性和UAV 执行任务的可信程度则没有进行研究。目前,国内外学者对多UAV 协同作战任务信任度的研究还很少,几乎没有相关的研究成果。
在任务决策过程中,必须考虑重要目标优先被打击。因此,在任务开始前,应该首先对目标进行重要性评估,在此基础上根据UAV 的当前任务信任度进行任务决策,以便得到更符合实战环境的决策结果。针对该问题,本文首先通过改进的模糊物元目标重要性评估方法,得到目标重要性排序,然后建立UAV 信任度模型,提出通过编队中各个UAV 的历史任务信息来评估、计算UAV 的当前任务信任度,以当前任务信任度作为编队Leader 选择的依据,实施可信的决策。
1 任务描述
复杂环境下,由于UAV 自身探测能力的限制和复杂电磁环境对飞机电子静默和战术隐身的要求,UAV 不能形成完备的战场态势感知信息,而有限分布式Leader-Follower 的异构型结构[10]使这一困难得以解决,本文采用有限分布式结构实现UAV 间的信息交互。
任务设定为:UAV 编队执行反恐打击任务,每个目标上须依次执行4 类任务:搜索发现、目标确认、攻击、目标毁伤评估。
1)对目标区预先进行侦察,获取该区域目标的相关信息,包括:防空单元、反雷达装置、房屋、车辆等。设定UAV 编队起降点,根据侦察结果,规划好航迹。
2)进行目标重要性评估,决定目标任务的执行顺序。
3)在UAV 执行任务的过程中如果发现新目标,对目标进行识别并更新态势信息,对新发现目标进行重要性评估,并将新目标信息发布给所有UAV。
4)UAV 返回对新目标的任务意向信息,长机根据各个UAV 的历史任务数据、当前状态等信息,求解基于UAV 历史任务信任度的信任网络模型,为UAV任务决策提供一个判据,优化UAV 任务决策结果。
2 改进的模糊物元目标重要性评估
由于在复杂环境下,UAV 依靠自身的传感器收集的信息有模糊性[11]。构建目标的模糊物元R ={M,Z,V},其中M 表示目标名称,Z 表示目标评价指标,V 表示评价指标量值。
目标评价指标体系为:1)目标类型(z1);2)机动性(z2);3)电磁干扰能力(z3);4)目标距离(z4);5)时间敏感性(z5);6)目标安全时间(z6);7)火力毁伤程度(z7);8)易损性(z8)。每个UAV 依据上述评价指标进行综合模糊评判,综合评判函数为

式中:aji表示UAV jth对目标ith的综合评价;ηjik为UAVjth对目标ith的第k 项评价指标权重;val(zjik)为UAVjth对目标ith的第k 项评价指标的估值。根据本文所述重点,目标类型在目标评价指标体系中占较大权重,其余评价指标权重可合理分配。易知aji值域区间为[1,100].
对模糊物元R={M,Z,V}的组元进行置换。根据评价指标,各个UAV 已计算出各个目标的综合指标量值A,用A 代替模糊物元中评价指标量值V.用UAV 代替评价指标Z.于是得到各UAV 对各目标的基于目标重要性的模糊物元集Rmn:
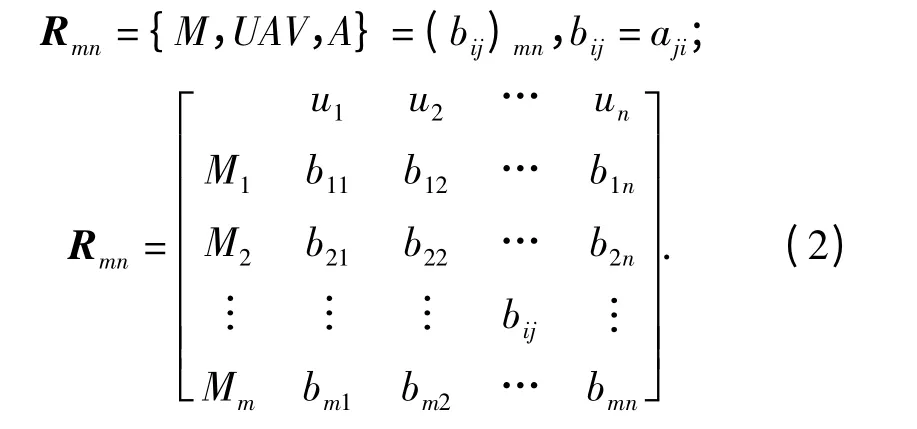
定义 论域U 上,模糊集R∈U,给定了一个映射:f:R→[0,1],则称f(R)为模糊集合的隶属函数。f(a)表示U 中各个元素a 属于R 集合的程度,当a是一个确定的元素a0时,称f(a0)为元素a0对模糊集合的隶属度。构造统一隶属函数f(x),称之为S型隶属函数,其函数形式为
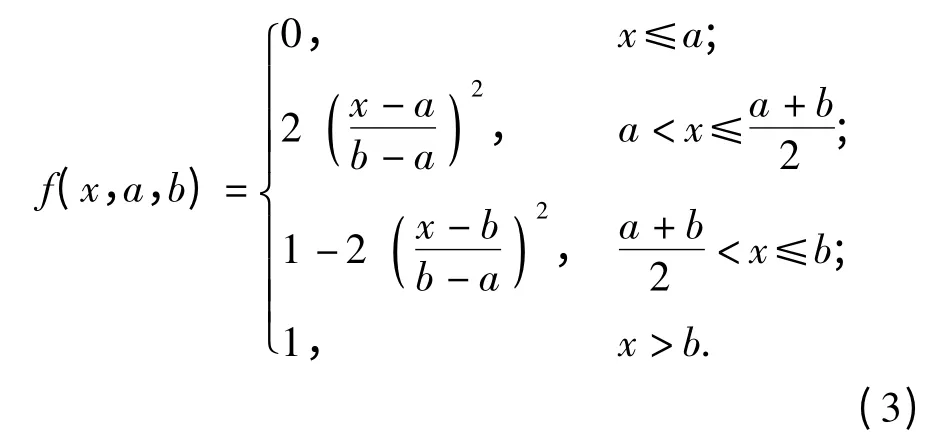
S 型隶属函数中参数a,b 的取值范围为:a∈(0,Rmin],b∈(a,Rmax],其中,Rmin表示模糊集的最小元素值,Rmax表示模糊集的最大元素值。由aji知,模糊集取值范围在(0,100]之间,故本文取a=1,b=100.
与概率函数[12]相比,使用S 型隶属函数作为衡量函数的特点及其对物元评估结果的影响在于:1)S 型隶属函数具有映射值分布均匀合理的特性,模糊值与隶属度值呈一一映射关系;2)在目标数目即模糊集发生变化时,只需要对新目标进行模糊评估,避免了重复计算。
将模糊物元集Rmn中的元素bij经过隶属度函数f(x)处理后,得到新物元μij, 构成物元集R†mn:

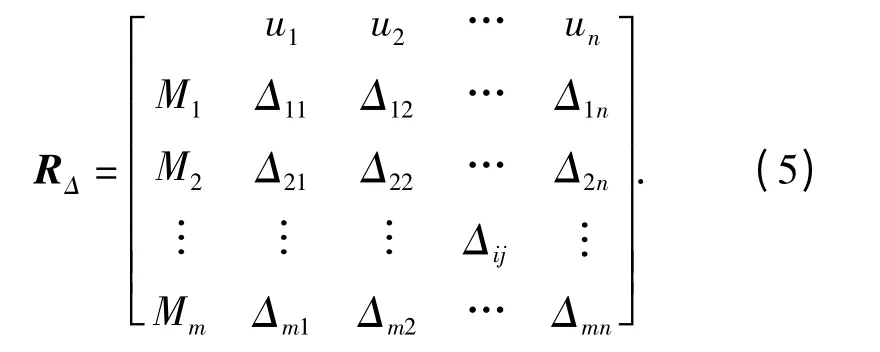
利用信息熵进行数据处理:

式中osi表示经数据处理得到的目标i 的物元值,最终得到各个目标模糊物元R'OS:

考虑到UAV 作战前预先指定了首要攻击目标,在上面的基础上,加入影响因子

则最终物元

通过引入影响因子,使首要攻击目标的重要性增大,在任务执行过程中就能优先被攻击,体现作战主观意图。
3 基于历史任务的UAV 信任度评估
随着任务的执行,UAV 编队及战场环境可能发生变化,导致UAV 的任务发生改变。以任务过程中新增目标任务为例,本文提出一种基于UAV 历史任务信任度的任务决策模型,作为UAV 能否执行新增任务的判别依据。
3.1 UAV 编队信任网络模型
将编队各个飞机的信任关系用网络表示,如图1所示。在网络中,节点表示各个飞机,整个编队构成一个节点集node_set ={a,b,c,d,e,f,g},节点之间的连线表示二者的信息交互关系,所赋权值定义为信任度,定义2 个紧连的节点为直接信任关系。由于信任不具有对称性,所以信任度是有向的。

图1 信任网络模型Fig.1 Model of trust network
3.2 UAV 信任度计算
UAV 信任度分为直接信任度和间接信任度[13]。信任度的评价因子有UAV 的任务完成度tc、任务效费比与预定效费比偏差值战损度bd、剩余载弹量rl、航迹保持度pk、剩余燃油量ro.信任度是基于UAV 历史完成任务信息,根据上述评价因子综合分析结合时间衰减性、任务相关性计算出的信任估计值。
UAVith对UAVjth第n 次任务的直接信任度值计算公式为

UAVith对UAVjth的前n 次直接信任度ψij=其中0≤≤1,设直接信任度阀值为Q,ψij中所有大于等于Q 的值组成集合Sij=所有小于Q 的值组成集合Fij=ψij-Sij,即则UAVith对UAVjth执行第n+1 次任务的直接信任度值dtn+1ij,其计算公式为

式中:δc为任务相关性因子,表示前后任务的衔接程度,如果前后任务衔接紧密则取值为1,否则取小于1 的常数值;ϑt为时间衰减因子,对于近期执行的任务取值为1,随着交互记录距今时间的增加而逐渐减小;当前位置函数φ(cp)刻画与目标的距离关系,其值越靠近1 则距离目标越近;α 为权值参数。
间接信任度可以通过多条信任链获取,但是间接推荐的信任度应遵循如下原则:
原则1:从推荐的多条信任链中,除去开始节点和终节点,每条信任链中间节点构成的集合之间的交集为空集。
原则2:从某条信任链中,最终得到的间接信任度应小于该信任链中节点的最小信任度。Tab.
设UAVith与UAVjth之间不紧连且存在N 条信任链,每条信任链由若干节点相连,则UAVith与UAVjth的间接信任度表示为idtnij,计算公式如下所示:
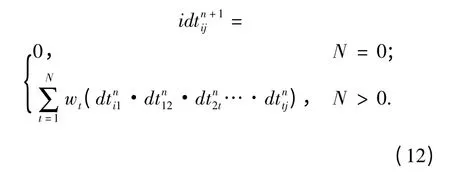
式中wt为第t 条信任链的权重,间接信任度随着信任链中节点数的增加而不断减小,其可信程度也越来越小。因此本文中设定为3 层,以控制其不可信程度。
UAVith对UAVjth的总信任度用tn+1ij表示,本文采用文献[13]中设计的计算公式,引述如下:

当UAV 间不存在紧连关系即z =0 时,则不必考虑直接的推荐信任。
权值qd的大小根据直接信任度和间接信任度自身的不确定性来设定。采用的信息熵理论,直接信任度的熵函数如(14)式所示,权值计算方法如(16)式所示。

式中p 为信任度评估等级数。本文可将信任分为5 个级别:完全信任(信任度等于1)、比较信任(信任度大于等于0.8、小于1)、一般信任(信任度大于等于0.5,小于0.8)、不信任(信任度大于等于0.2,小于0.5)以及完全不信任(信任度小于0.2).间接信任度权值的计算方法同直接信任度计算方法。
由此,编队Leader 就获得了编队中各UAV 的历史任务信任度。在任务变更或者新任务出现时,编队Leader 便可以根据知识库里的各个UAV 的当前时刻任务信任度以及各UAV 提供的对新任务的效费比信息,进行加权求和获得各个UAV 的总效益值,对所有UAV 按照总效益值进行降序排列,总效益值高的UAV 将优先获得新目标的任务,待新任务分配完毕后,编队Leader 将任务决策结果发送给各个UAV.由于战场环境的实时动态性,在出现新任务时,UAV 编队的环境条件不尽相同,因此对于此处加权权重的选取,由编队Leader 根据实时战场情形主观确定。
4 数字仿真及分析
4.1 目标重要性评估仿真
设计2个实验说明本文所提出的评估方法的性能。
1)假设UAV 编队规模为7 架机,发现4 个目标,飞机对目标的评估构成的模糊物元,见表1所示。通过本文所提的评估方法,得到目标重要性评估结果,如图2所示。仿真环境为XP 系统,主频1.8 GHz,内存3.25 G,Matlab 平台。仿真时间为0.056 096 3 s.
表1 模糊物元Tab.1 Value of fuzzy matter-elements

图2 目标重要性隶属度Fig.2 Target importance membership grade
2)在执行任务过程中,发现2 个新目标,经过传感器的探测,得到各机对目标的评估数据如表2所示。
表2 各机对新目标的评估值Tab.2 New targets’evaluated value among UAVs
图3显示了新增目标后的仿真结果。在相同的仿真环境下,仿真时间为0.056 979 7 s.图2和图3都是采用本文提出的目标重要性评估方法,根据设定的仿真初始数据进行计算得出的结果,没有考虑加入影响因子λ,是由于只要知道了原本的目标重要性排序(图2、图3所示),作战决策者就可根据作战意图,引入影响因子,很容易得到基于作战主观意图的最终目标重要性排序。

图3 目标重要性隶属度Fig.3 Target importance membership grade
从仿真结果可看出,目标数的变化导致原有目标的隶属度发生了轻微的变化。这是由于新增目标的影响,用于提取信息量的熵函数中对新目标进行了数据融合,所以原有目标的隶属度会发生变化。从仿真运行时间看,时间差为0.000 88 s,不到毫秒级。理论上本方法可以在实时环境中用于进行目标重要性的评估。
对于目标数很大或者目标急剧增加的情况。实验假设UAV 从1 增加到30,目标数从1 增加到50.仿真时间变化如图4所示。从图中可以更进一步证明,理论上该方法能够满足在线评估的要求。

图4 仿真时间变化趋势Fig.4 Variety trend line of running time
4.2 UAV 信任度仿真
对于在执行任务过程中出现的新目标,应根据当前各UAV 的任务信任度以及对新任务所持态度综合做出决定,由哪些UAV 执行任务。
实验假设在任务过程中发现了新目标,经过目标重要性评估后,确定为优先攻击对象。假设当前各机已经执行6 次任务。任务数据见表3.
设置表3中6 个评价因子的权重分别为0.22、0.2、0.13、0.14、0.17、0.14,任务相关性因子δc根据各UAV 的任务情况决定,时间相关性因子ϑt分别为0.089、0.11、0.31、0.53、0.78、0.82,当前位置φ(cp)由各UAV 决定。其中α1、α2、α3的权重分别为0.4、0.2、0.4.
实验设置编队规模如图5所示。直接信任度可由实验数据直接求得,间接信任链为3 层。例如,求“1—2”的间接信任度可通过“1—3—2”和“1—7—2”求得。
当新目标出现时,要求Leader 根据各机的任务完成情况进行信任度评估。通过本文建立的信任度评估模型,计算得到当前各UAV 执行下一次任务的直接信任度、间接信任度和总信任度分别见表4~表6.
表3 UAV 历次任务数据Tab.3 History mission data of UAVs
图5 编队规模Fig.5 Dimension of formation

表4 直接任务信任度评估结果Tab.4 Results of direct mission trust value evaluation

表5 间接任务信任度评估结果Tab.5 Results of indirect mission trust value evaluation
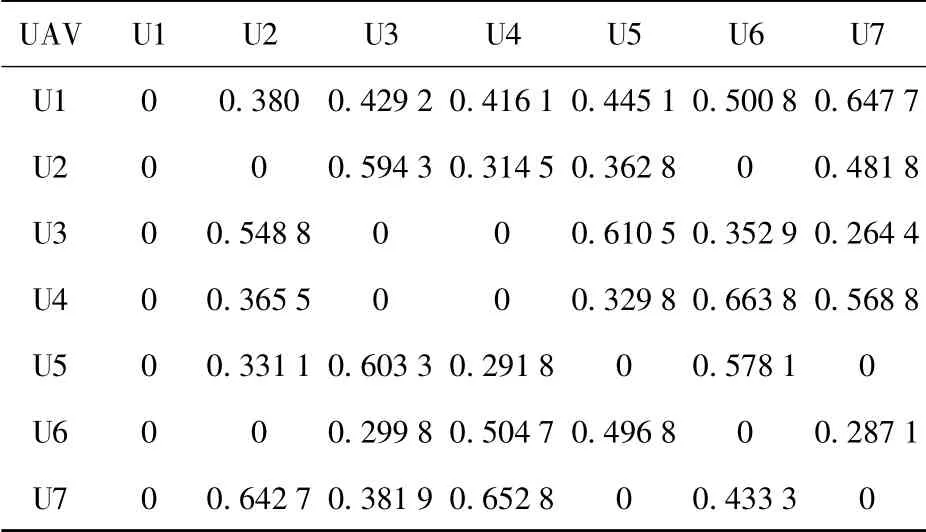
表6 总任务信任度评估结果Tab.6 Results of collective mission trust evaluation
表4~表6表明了当前时刻UAV 编队的直接信任度和间接信任度及总任务信任度。
在上述相同的仿真环境下仿真时间为0.388 5 s.由于本实验设计1 号机为Leader,为了任务决策方便有效,故其他UAV 对1 号机的信任度置为0,同时UAV 对自身的信任度也置为0,信任链中节点数大于3 时,其信任度为0.
同样的条件下,在没有使用信任网络模型的情况下,如果选择执行新任务的UAV 是6 号机,通过信任网络模型可以看出7 号机的信任度比6 号机高,使用7 号机较好地完成新任务的可信度更强。因此决策结果为派遣7 号机执行新任务。根据历史任务数据提供的信息提取出的当前UAV 任务可信度作为UAV 任务决策的判据,可使任务决策结果更优。
5 结论
针对多UAV 协同任务决策问题,提出了一种考虑目标重要性和UAV 任务信任度两种因素的任务决策方法。该方法由基于改进的模糊物元的目标重要性评估和基于历史任务的UAV 任务信任度评估两部分组成。其中,前者通过改进物元组成结构以及采用统一隶属函数,使得改进后的目标评估方法实时性强,能迅速求解出评估结果。后者以UAV 历史任务数据为基础,构建了多UAV 信任网络模型,给出直接信任度、间接信任度和通过信息熵理论计算总信任度的计算方法。仿真结果表明,本文提出的任务决策方法实时性强,能够满足UAV 任务决策需求,具有一定的可行性。
References)
[1] 余家祥,王绍华,程文鑫.基于改进局部搜索遗传算法的目标分配决策[J].系统工程与电子技术,2008,30(6):1114 -1117.YU Jia-xiang,WANG Shao-hua,CHENG Wen-xin.Target allocation decision making based on improved genetic algorithm with local search[J].System Engineering and Electronics,2008,30(6):1114 -1117.(in Chinese)
[2] 刘跃峰,张安.有人机/无人机编队协同任务分配方法[J].系统工程与电子技术,2010,32(3):584 -588.LIU Yue-feng,ZHANG An.Cooperative task assignment method of manned/unmanned aerial vehicle formation[J].System Engineering and Electronics,2010,32(3):584 -588.(in Chinese)
[3] 张安,史志富,刘海燕,等.基于贝叶斯优化算法的UCAV 编队对地攻击协同任务分配[J].电光与控制,2009,16(1):1 -5.ZHANG An,SHI Zhi-fu,LIU Hai-yan,et al.Cooperative task allocation for UCAV air-to-ground combat based on Bayesian optimization algorithm[J].Electronics Optics & Control,2009,16(1):1 -5.(in Chinese)[4] Serdar Erkan,Mahmut Kandemir,Gary Giger.Advanced task assignment for unmanned combat aerial vehicles targeting cost efficiency and survivability[C]∥46th AIAA Aerospace Sciences Meeting and Exhibit.Reno:AIAA,2008 -873.
[5] 叶文,朱爱红,欧阳中辉.基于混合离散粒子群算法的多无人作战飞机协同目标分配[J].兵工学报,2010,3(31):331 -336.YE Wen,ZHU Ai-hong,OUYANG Zhong-hui.Multi-UCAV cooperation mission assignment based on hybrid discrete particle swarm optimization algorithm[J].Acta Armamentarii,2010,3(31):331 -336.(in Chinese)
[6] 陈晶,潘全科.改进蚁群算法求解同型机任务调度问题[J].计算机工程与应用,2011,47(6):44 -48.CHEN Jing,PAN Quan-ke.Improved ant colony algorithm to solve identical parallel machine task scheduling problem[J].Computer Engineering and Applications,2011,47(6):44 -48.(in Chinese)
[7] Sujit P B,Beard R.Multiple MAV task allocation using distributed auctions[C]∥AIAA Guidance,Navigation and Control Conference and Exhibit.Hilton Head:AIAA,2007 -6452.
[8] Mehdi Alighanbari,Jonathan P How.A robust approach to the UAV task assignment problem[J].International Journal of Robust and Nonlinear Control,2008,18(2):118 -134.
[9] Johnson L B,Ponda S,Choi H-L.Asynchronous decentralized task allocation for dynamic environments[C]∥Proceedings of the AIAA Infotech@ Aerospace Conference,St.Louis:AIAA,2011-1441.
[10] 孙海波,周锐,邹丽,等.通信和测量受限条件下异构多UAV分布式协同目标跟踪方法[J].航空学报,2011,32(2):299-310.SUN Hai-bo,ZHOU Rui,ZOU Li,et al.Distributed cooperation target tracking for heterogeneous multi-UAV under communication and measurement constraints[J].Acta Aeronautica et Astronautica Sinica,2011,32(2):299 -310.(in Chinese)
[11] 杨兆兰.多目标决策模糊物元分析[J].甘肃联合大学学报:自然科学版,2005,19(3):12 -14.YANG Zhao-lan.Fuzzy matter-element analysis on multi-objection decision[J].Journal of Gansu Lianhe University:Natural Sciences,2005,19(3):12 -14.(in Chinese)
[12] 任佳,高晓光,郑景嵩,等.复杂环境下的无人机任务决策模型[J].系统工程与电子技术,2010,32(1):100 -103.REN Jia,GAO Xiao-guang,ZHENG Jing-song,et al.Mission decision making for UAV under dynamic environment[J].System Engineering and Electronics,2010,32(1):100 -103.(in Chinese)
[13] 彭涛,窦万峰.群组协同决策中基于决策者可信的信任模型研究[J].南京师范大学学报:工程技术版,2010,10(2):79-83.PENG Tao,DOU Wang-feng.Research on trust model based on trusted decision makers in group collaborative decision making[J].Journal of Nanjing Normal University:Engineering and Technology Edition,2010,10(2):79 -83.(in Chinese)
