摄像机参数与地面点坐标改正数的分离估计
2013-02-23余家祥赵晓哲梁德清姜鲁东周晶
余家祥,赵晓哲,梁德清,姜鲁东,周晶
(1.海军大连舰艇学院 战术学博士后流动站,辽宁 大连116018;2.海军装备部,北京100083)
0 引言
利用无人机、电视侦察弹等空中平台的航空侦察图像对地面目标进行实时定位具有极其重要的军事价值,因而受到普遍重视[1]。目前,根据航空图像进行实时目标定位的方法大致可以归为4 种,即基于数字高程(DEM)的定位方法[2-4]、基于激光测距的定位方法[5]、基于多帧图像联测的定位方法[6]和基于多帧图像同名点的定位方法[7-8]。
基于多帧图像同名点的定位方法是为降低其他3 种方法的使用条件而产生的一种地面目标定位方法,应用一次完成最小二乘算法(LMS)求解摄像机参数改正数和地面点坐标改正数是该方法的一个重要环节。然而,在运用该方法的实践中发现,当图像帧数及同名点数目较大时,一次完成LMS 的系数矩阵规模偏大、算法时间复杂度高、效率低。为解决该问题,本文根据改正数约束方程的特点,提出了基于分离LMS 原理的分离估计算法,该算法运用迭代方式交替估计航空摄像机参数改正数和地面点坐标改正数,能够有效提高改正数估计算法的效率。
1 分离LMS 原理
考虑如下线性方程组

式中:x 为l 维未知参数向量;b 为q 维观测数据列向量;A 为q×l 维系数矩阵(q >l).
为了估计未知参数,将x 划分成n 组,并相应地将矩阵A 划分成n 块,即将x 和A 分别写成如下形式

将(2)式和(3)式代入(1)式,可得

式中:A1,A2,…,An分别为q ×l1,q ×l2,…,q ×ln阶矩阵;未知参数向量x1,x2,…,xn的维数分别为l1,l2,…,ln,并且有

假设估计顺序为x1→x2→…→xn.在估计xi时,将x1,x2,…,xi-1的本次迭代估计值和xi+1,xi+2,…,xn的上次迭代估计值(或首次迭代初值)一并代入(4)式,移项整理后得

根据(6)式可以得到xi的估计值

根据测量平差理论的惯例[9],将(8)式中Wbi称为观测向量bi的权阵,它是bi的协因数阵Qbi的逆阵,即

式中协因矩阵Qbi可以通过如下运算得到

式中Qb为b 的协因矩阵。
当k <i 时,(10)式中的Qxk为xk当前迭代估计值的协因数阵;k >i 时,Qxk为xk上一次迭代估计值的协因数阵,且对于第一次迭代有

当i=1 时,(11)式被定义为

(11)式中xk的当前迭代估计值的协因数阵Qxk可以通过下式求取

根据(8)式得到xi的估计值以后,用类似的方式依次求解其他n-1 组参数。所有n 组参数{xk|k=1,2,…,n}计算完成后,意味着关于未知参数向量x 的第一次迭代步骤结束,得到x 的一个近似值。接着进入下一次迭代,直到所有参数组估计精度满足要求。
通过证明可分离算法估计结果与Jacobi 迭代计算结果等价,可以判断LMS 的收敛性[10-11]。为此,将(1)式写成如下形式

与(4)式类似,(14)式可以等价地写为

使用Jacobi 迭代,得到(15)式的解

显然,由(16)式确定的解与由(8)式确定的解相同。由于矩阵ATWA 是对称正定的,因此上述可分离算法的交替迭代过程是收敛的。
2 改正数约束方程
文献[7]指出:如果m 个地面点在从不同方位上摄取的n 帧图像上均有可识别像点,则根据这些像点可以建立2mn 个关于航空摄像机参数改正数和地面点坐标改正数的约束方程组,且该方程组可以简洁地表示为

式中:

3 改正数的分离估计方法
3.1 地面点坐标改正数的分离估计
求解u 之前,将(17)式改写成类似于(1)式的形式,即

式中

式中v 为上一次迭代的估计值(或首次迭代的初值)。
若v 是给定的常量初值,则bu的协因数阵Qbu与b 的协因数阵Qb相同,即

否则,若v 是上一次迭代估计值,则根据误差传播规律可以推导出

式中Qv为上一次迭代v 估计值的协因数阵。
根据误差传播规律,u 的协因数阵Qu可以由下式求取

式中Wb通常称为观测向量b 的权阵,它是协因数阵Qb的逆阵,即

由于m 个地面点坐标改正数u1,u2,…,uj,…,um相互独立,因此可以利用分离算法求解(23)式。为此,将(23)式重写为

式中Au1,Au2,…,Aum为矩阵C 的2mn×3 阶子块。
假设估计顺序为:u1→u2→…→um.在估计uj时,将u1,u2,…,uj-1的本次迭代估计值和uj+1,uj+2,…,um的上次迭代估计值代入(29)式,移项、整理后,得

式中

这样,uj的估计值为

式中Wbuj为观测向量buj的权阵,它是buj的协因数阵Qbuj的逆阵,即

根据(31)式可以推导Qbuj的表达式

当k <j 时,(34)式中的Quk为uk当前迭代估计值的协因数阵;当k >j 时,Quk为uk上一次迭代估计值的协因数阵,且对于第一次迭代有

当j=1 时,(35)式被定义为

(34)式和(35)式中,uk的当前迭代估计值的协因数阵Quk可以通过(37)式求取

3.2 摄像机参数改正数的分离估计
用分离算法估计v 的过程与估计u 类似。首先,将(17)式改写成类似于(23)式的形式,即

式中

式中u 为当前迭代估计值。
根据误差传播规律,可以得到bv的协因数阵

式中Qu为u 的协因数阵,由(27)式确定。估计值v 的协因数阵

由于n 个摄像机参数改正数v1,v2,…,vi,…,vn相互独立,因此(38)式也适用分离算法,且算法实现原理与(29)式~(37)式所示运算过程类同。
4 仿真分析
由于改正数估计的精度最终以同名地面点定位误差的形式反映,因此实验以定位误差作为衡量分离LMS 和一次完成最小二法计算精度指标,并在此基础上比较两类方法的运算效率。
仿真条件:1)图像帧数为n,分别由摄像机从均匀分布在以待定位地面点的天顶点为圆心的圆圈上的n 个摄站上拍摄,如图1所示;2)图1中,圆圈直径相对于待定地面点张角α 为90°,摄站与与待定位地面点的距离为2 500 m;3)摄像机焦距为120 mm;在图1中的500 m ×500 m ×200 m 长方体内随机产生m 个地面点;4)仿真计算时,摄像机内外参数和地面点坐标的迭代初值与真值的偏差大小设置为真值的10%.仿真结果如表1所示。
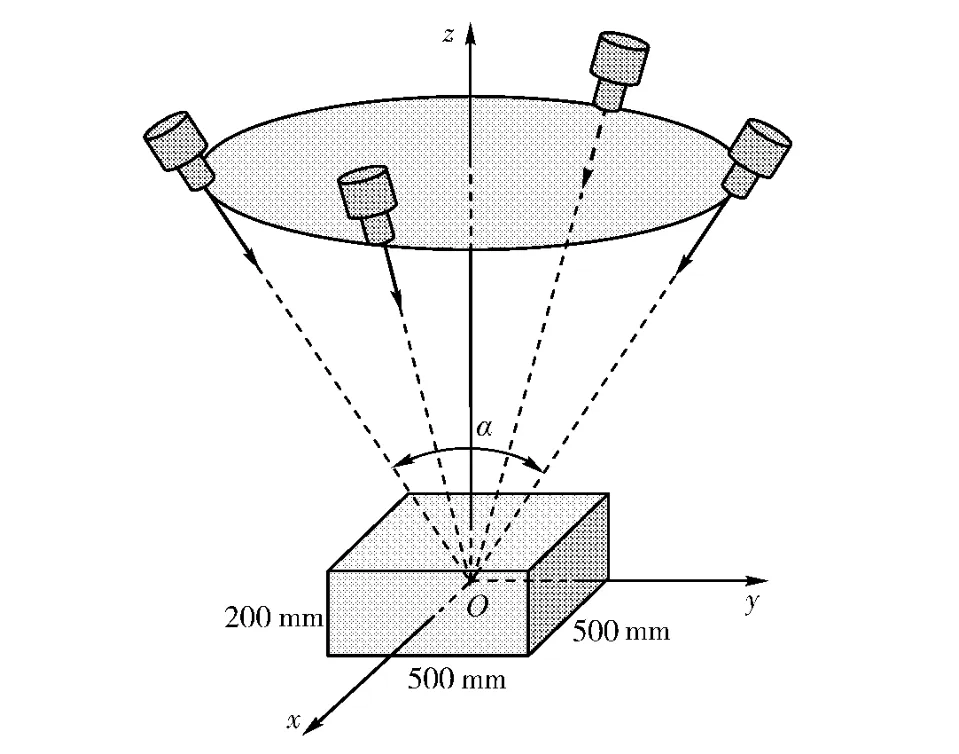
图1 摄站分布示意图Fig.1 Layout of cameras

表1 两种LMS 定位性能比较Tab.1 Location capability comparison of two LMS methods
分析表1可以得到如下两点结论:1)分离算法和一次完成LMS 的计算精度相当;2)分离算法的运算效率高于一次完成算法,且随着同名点数目增加,运算效率提高越显著。
5 结论
针对一次完成LMS 运算效率较低的问题,根据摄像机参数改正数和地面点坐标改正数约束方程组的特点,给出了基于分离LMS 的改正数迭代交替计算模型。仿真分析表明,分离估计算法与一次完成LMS 的计算精度相当,但其运算效率高于一次完成算法,且随着同名点数目增加,运算效率提高越显著,体现了改正数分离估计算法的优越性。本文后续研究内容将主要考虑分离估计算法对摄像机空间位置分布的鲁棒性。
References)
[1] 余家祥.航空侦察摄像机参数估计与对地定位方法研究[D].北京:清华大学,2007.YU Jia-xiang.Research on aerial reconnaissance camera parameter estimation and geo-location methods[D].Beijing:Tsinghua University,2007.(in Chinese)
[2] Sheng Y.Theoretical analysis of the iterative photogrammetric method to determining ground coordinates from photo coordinates and a DEM[J].Photogrammetric Engineering and Remote Sensing,2005,71(7):863 -871.
[3] 李雯,肖凯,刘文.应用单张像片解析法实现测绘图像实时定位[J].航空学报,2002,23(1):82 -84.LI Wen,XIAO Kai,LIU Wen.Real-time location Determination of mapping image using single photo analytic method[J].Acta Aeronautica et Astronautica Sinica,2002,23(1):82 -84.(in Chinese)
[4] 姚杰,江碧涛.利用单张航空像片和DEM 实现GIS 空间数据的更新[J].解放军测绘学院学报,1996,(12):276 - 279.YAO Jie,JIANG Bi-tao.Updating spatial data of GIS with a single photo and DEM[J].Journal of Institute of Surveying and Mapping,1996,(12):276 -279.(in Chinese)
[5] 毛昭军,汪德虎.姿态测量/激光测距的无人机目标定位模型[J].火力与指挥控制,2003,28(5):14 -17.MAO Zhao-jun,WANG De-hu.A model of target position for UAV based attitude measuring/laser range-finder[J].Fire Control& Command Control,2003,28(5):14 -17.(in Chinese)
[6] 段连飞.基于图像序列的目标定位方法研究[M].合肥:中国科学技术大学出版社,2002:57 -86.DUAN Lian-fei.Research on target location methods using image series[M].Hefei:University of Science and Technology of China,2002:57 -86.(in Chinese)
[7] 余家祥,萧德云,姜鲁东.基于多帧图像同名点的无人机对地定位新方法[J].兵工学报,2008,29(3):360 -364.YU Jia-xiang,XIAO De-yun,JIANG Lu-dong.A new UAV geolocation approach based on common points on multiple images[J].Acta Armamentarii,2008,29(3):360 -364.(in Chinese)
[8] Yu J X,Xiao D Y,Jiang L D,et al.New geo-location approach based on camera coordinates and common points on multiple images[J].Defense Science Journal,2009,59 (1):43 -48.
[9] 游祖吉,樊功瑜.测量平差教程[M].北京:测绘出版社,1991.YOU Zu-ji,FAN Gong-yu.Surveying adjustment[M].Beijing:Survey Press,1991.(in Chinese)
[10] Phillips C,Cornelius B.Computational numerical methods[M].Chichester:Ellis Horwood,1986:375.
[11] Wang X,Clarke T A.Separate adjustment in close-range photogrammetry[J].ISPRS Journal of Photogrammetry and Remote Sensing,2001,55(5 -6):289 -298.
