电液谐振式高频疲劳试验台动态特性研究
2013-01-25白继平贾文昂
白继平,阮 健,贾文昂
(1.浙江工业大学 机械制造及自动化教育部重点实验室,杭州 310014;2.浙江交通职业技术学院 海运学院,杭州 311112)
电液谐振式高频疲劳试验台动态特性研究
白继平1,2,阮 健1,贾文昂1
(1.浙江工业大学 机械制造及自动化教育部重点实验室,杭州 310014;2.浙江交通职业技术学院 海运学院,杭州 311112)
针对由单出杆液压缸与二位三通2D阀组成的电液谐振式高频疲劳试验台,因单出杆液压缸无杆腔与2D阀相连,有杆腔恒通油源。而2D阀突破常规电液伺服阀频宽极限,具有宽频带、高频响等特点,通过改变阀芯旋转速度及阀口轴向开度,可对系统分别进行变频、变幅控制。对采用2D阀控制技术的电液谐振式高频疲劳试验台建立数学、仿真模型,并对该试验台谐振工况进行仿真与实验研究,结果表明该系统谐振工况输出位移(载荷力)与激振力大,消耗外界功率低。
电液;疲劳试验台;谐振;动态特性
电液谐振疲劳试验台利用谐振原理工作,即激振力频率与质量-弹簧-阻尼系统固有频率相同,系统具有激振功率大、输出载荷力大等优点,试样吸收的能力几乎完全释放,能实现高负荷、高频率、低消耗等试验目的[1]。传统电液谐振高频疲劳试验台主要由电液伺服阀和液压执行元件等组成,但受电液伺服阀频宽限制,难以在高频区域工作,一般谐振频率在20~100 Hz。美国MTS公司与密西根理工大学联合研发一种音圈伺服阀控制方案,将电液疲劳试验系统工作频率提高到1 000 Hz[2],但由于该阀先导与功率级阀口面积随系统频率提高而大幅衰减,系统振动频率、振幅及零点存在耦合干扰,难以实现高精度控制。阮健等[3-4]采用2D阀控制双出杆液压缸技术,已成功将电液疲劳试验台工作频率提高到2 000 Hz,但该方案存在系统高频段工作时,输出载荷力及振幅严重衰减问题。本文提出二位三通2D控制单出杆液压缸的电液疲劳试验系统新方案,通过调节单出杆液压缸无杆腔初始长度改变系统的固有频率,改变2D阀阀芯旋转速度和阀口轴向开度实现控制系统激振频率及振幅,实现液压缸活塞杆全行程谐振,提高系统工作效率。本文主要对2D阀控缸疲劳试验台建立数学模型,并用MATLAB软件的SIMULINK工具箱搭建仿真模型,对该试验台谐振工况仿真与实验研究。
1 工作原理
疲劳试验台主要由二位三通2D阀与单出杆液压缸组成,液压缸活塞杆无杆端面积是有杆端的2倍,2D阀控制无杆腔,液压缸的有杆腔恒通油源。2D阀阀芯台肩Ⅰ处阀口沟通时(图1),无杆腔与油源沟通,活塞杆外伸;阀芯台肩Ⅱ处阀口沟通时,无杆腔与油箱沟通,活塞杆收缩。阀芯台肩均匀分布Z个沟槽(Z为4的偶数倍),沟槽圆心角为θ0,相邻台肩沟槽圆心角相差2θ0;阀套在三个阀腔处开有三圈相同结构窗口,每圈窗口数量为Z,每个窗口圆心角为θ0;保证阀腔P与A沟通时,阀腔A与T断开,反之亦然。2D阀结构特点使2D阀控缸易实现高频振动,即2D阀芯转一圈,活塞杆往复运动Z次。
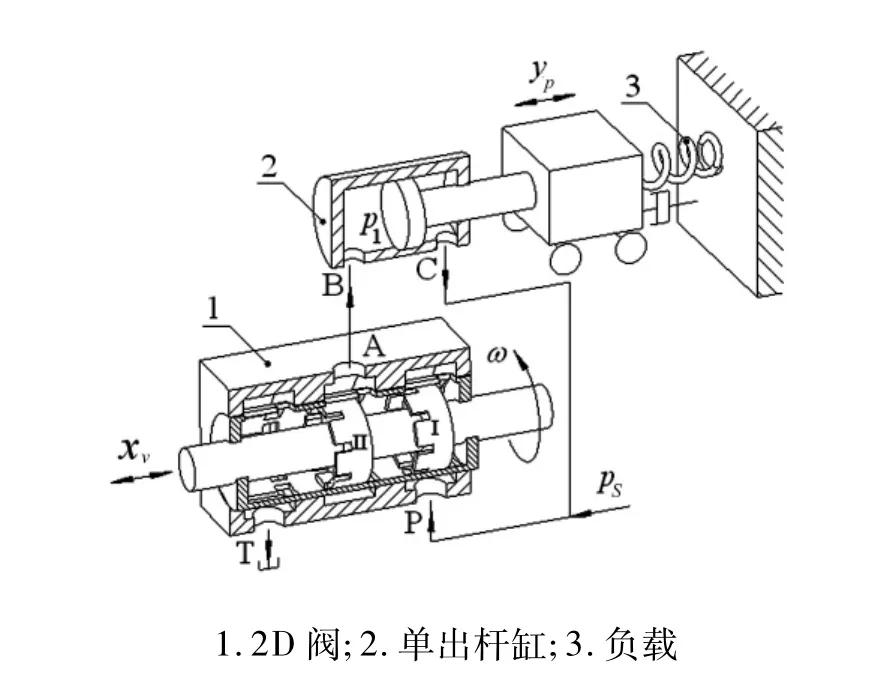
图1 电液谐振疲劳试验台Fig.1 Electro-hydraulic resonant fatigue test rig sketch
2 数学模型[5-6]
疲劳试验台数学模型包括二位三通2D高速转阀与液压缸两部分,其中阀的数学模型包括阀口面积与阀口流量。
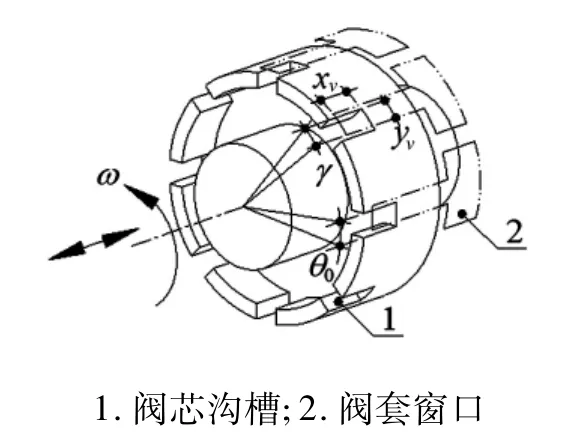
图2 2D阀口示意图Fig.2 2D valve ports sketch
2.1 阀口面积

式中:xv为阀口轴向开度,m;yvi为第i个台肩阀口周向开度,m;i=1,2。
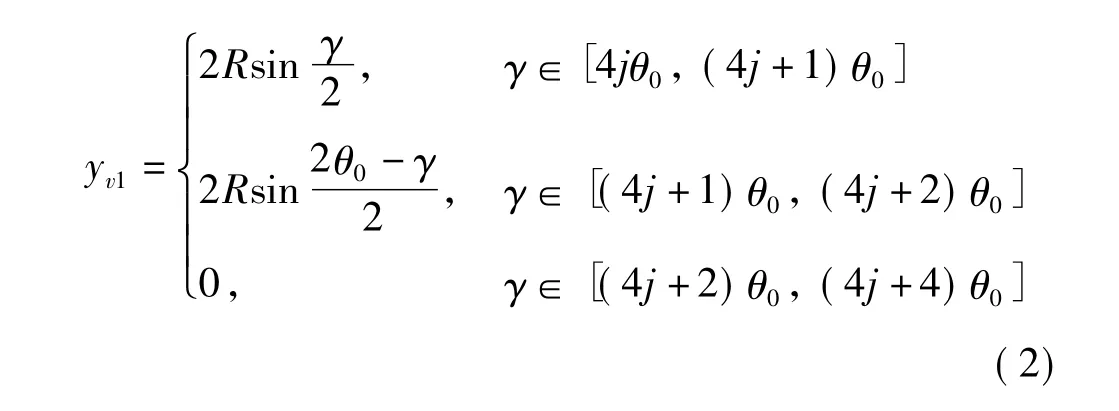
式中:R为阀芯台肩半径,m;γ为阀芯转角,γ=ωt,rad;ω 为阀芯转动角速度,rad/s;j=0,1,2…;θ0为阀芯台肩沟槽圆心角,θ0=π/(2Z),rad。
2.2 阀口流量
阀芯台肩Ⅰ处阀口开启时,阀口流量方程可表示为:
式中:Cd为流量系数;ps为油源压力,MPa;p1为无杆腔压力,MPa;ρ为流体密度,kg/m3。
阀芯台肩Ⅱ处阀口开启时,阀口流量方程可以表示成式(5):

式中:pa为油箱背压,MPa。
2.3 液压缸
无杆腔流量连续性方程为:

式中:QL为液压缸无杆腔流量,QL=Q1- Q2,m3/s;A1为活塞无杆端面积,m2;yp为活塞杆位移,m;V1为无杆腔体积,m3;Eh为液压弹性模量,MPa。
活塞杆力平衡方程为:

式中:A2为活塞有杆端面积,m2;mt为等效运动质量,kg;Bc为负载等效粘性阻尼系数,Ns/m;FN=KLyp为系统输出载荷力,N;KL为负载等效弹性刚度,N/m;FL为外负载力,N。
液压缸活塞振动频率为:

式中:fp为活塞振动频率,Hz;f为阀芯转动频率,Hz。
2.4 谐振频率[7]
电液谐振疲劳试验台谐振频率由机械固有频率及液压固有频率组成,液压固有频率较高,而2D阀频较宽,能覆盖液压固有频率,故较常规电液伺服阀易实现电液高频谐振控制。
电液谐振疲劳试验台固有频率为:

式中:f0为系统固有频率,Hz;Kh为液压等效弹性刚度,Kh=EhA1/yp0,N/m;yp0为无杆腔初始长度,m。
由式(9)知,通过改变活塞初始位置,即调节无杆腔初始长度yp0,可改变该疲劳试验台谐振频率f0,能在更宽频段范围内实现高频疲劳试验。在特定参数下所得试验台谐振频率与无杆腔初始长度关系见图3。
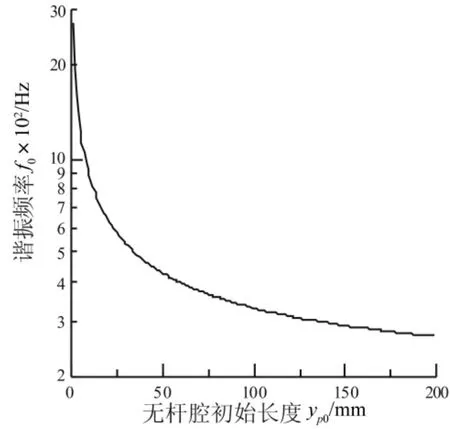
图3 f0与 yp0关系Fig.3 Relation graph between f0and yp0
3 仿真研究[8-9]
据数学模型,借助MATLAB软件的SIMULINK工具箱对二位三通2D阀控制单出杆液压缸电液谐振高频疲劳试验台进行建模。
3.1 仿真模型
由式(1)~式(3)可建立2D阀阀口面积随阀芯转速变化仿真子模块(图4),由该子模块可得阀口面积随阀芯转角变化关系近似为三角波,且幅值变化量与阀口轴向开度xv成正比。

图4 阀口面积子模块Fig.4 Valve-port area sub blockset

图5 阀口流量子模块Fig.5 Valve-port flux sub blockset
由式(1)~式(5)可建立2D阀阀口流量仿真子模块(图5),该模型输入端包含无杆腔压力p1,说明阀与缸之间存在非线性耦合关系。
由式(6)、式(7)可建立单出杆液压缸动力学机构仿真子模块(图6),该模型输入端包含2D阀口输入流量Qv、外负载力FL及液压缸无杆腔初始长度yp0,输出端包含载荷力FN及活塞杆位移yp,及无杆腔压力p1反馈。
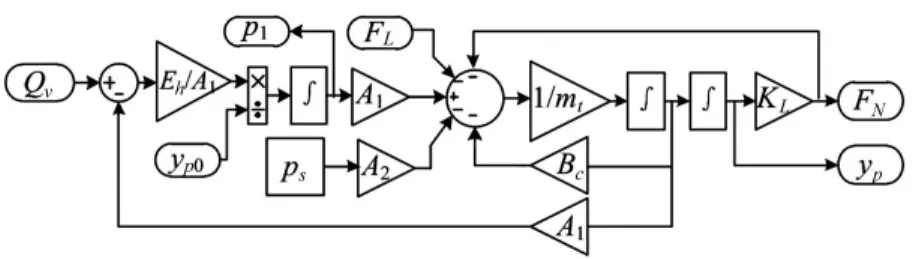
图6 单出杆液压缸子模块Fig.6 Asymmetric cylinder sub blockset
3.2 仿真结果[10-12]
利用仿真模型,对二位三通2D阀控制单出杆液压缸谐振工况仿真研究,便于了解结构参数对系统性能影响,对实验研究具有指导意义。
3.2.1 活塞杆位移
无阻尼谐振工况(图7(a)),活塞杆振幅恒定,不受阀口开度xv影响,位移波形yp与阀口输入波形yv相位差180°,即阀口yv1开大时,无杆腔与油源沟通开始进油,但此时活塞处于缩进运动状态,对无杆腔内液压油形成挤压;当阀口yv1关小时,活塞杆由缩进转为伸出运动,无杆腔内液压油的挤压现象得到缓解;当阀口yv2开大时,无杆腔与油箱沟通开始排油,加之活塞杆继续外伸,当阀口yv2关小时,活塞杆由外伸转为缩进运动,开始对无杆腔内油液形成挤压。存在阻尼时(图7(b)),活塞杆振幅受xv影响,且xv开度较小时,yp存在偏置(图7(b)中xv开度20%曲线),因为受阀口节流能量损失影响,无杆腔对外做功能力下降所致。据胡克定律,试件弹性变形时,位移与作用力成正比,故图7描述活塞杆输出的位移yp无量纲波形等同于活塞杆输出的载荷力FN无量纲波形。
3.2.2 负载流量
所谓负载流量是指液压缸无杆腔流量,该流量可以反映外界对液压系统输入的能量。图8为系统在无阻尼(图8(a))与有阻尼(图8(b))谐振工况下负载流量随阀芯转角变化的无量纲图。图8(a)中,阀芯转角γ/θ0=1附近,阀口yv1开口接近最大位置,无杆腔进油量锐减至零后出现从无杆腔向油源排油的“倒灌”现象,再随yv1的关小,“倒灌”现象消失,无杆腔进油恢复,直至yv1关闭为止;阀芯转角γ/θ0=3附近,阀口yv2开口接近最大位置,无杆腔向油箱排油量迅速衰减至零后出现从油箱向无杆腔的“倒吸”现象,再随yv2的关小,“倒吸”现象消失,无杆腔排油恢复,直至yv2关闭为止。油液“倒灌”现象,减少了油源向无杆腔的供油量,降低了油源能耗;油液的“倒吸”现象,是对无杆腔储油量的一种补偿方式,有助于降低油源对无杆腔供油。随着系统阻尼比的增大,“倒灌”与“倒吸”现象逐渐消失,油源的能耗也逐渐增加(图8(b))。
3.3.3 负载压力
负载压力指液压缸无杆腔内的压力,其值大小可决定系统对外做功能力。为进一步解释“倒灌”与“倒吸”现象,需对无杆腔负载压力进行分析。谐振工况时系统负载压力无纲量见图9,其中纵坐标为负载压力幅值与油源压力幅值之比。无阻尼谐振工况时(图9(a)),负载压力幅值不受xv开度影响,阀芯转角γ/θ0=1附近,负载压力超过油源压力,使系统出现“倒灌”现象(图8(a));在阀芯转角 γ/θ0∈[2.7,3.3]时,负载压力为零,此时活塞杆正处于从外伸到收缩的过渡过程(图7(a)),运动的活塞对无杆腔形成“泵”的抽吸效应,即出现“倒吸”现象(图8(a))。随着阻尼比的增加(图9(b)),负载压力不再出现极端情况,而围绕0.5倍油源压力波动,波动幅值随着xv开度的变化而变化。
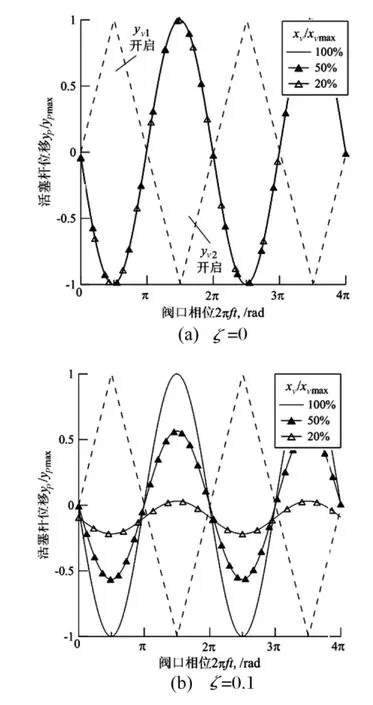
图7 活塞杆位移无量纲图Fig.7 Piston rod displacement dimensionless graphs

图8 阀口流量无量纲图Fig.8 Valve-port flux dimensionless graphs
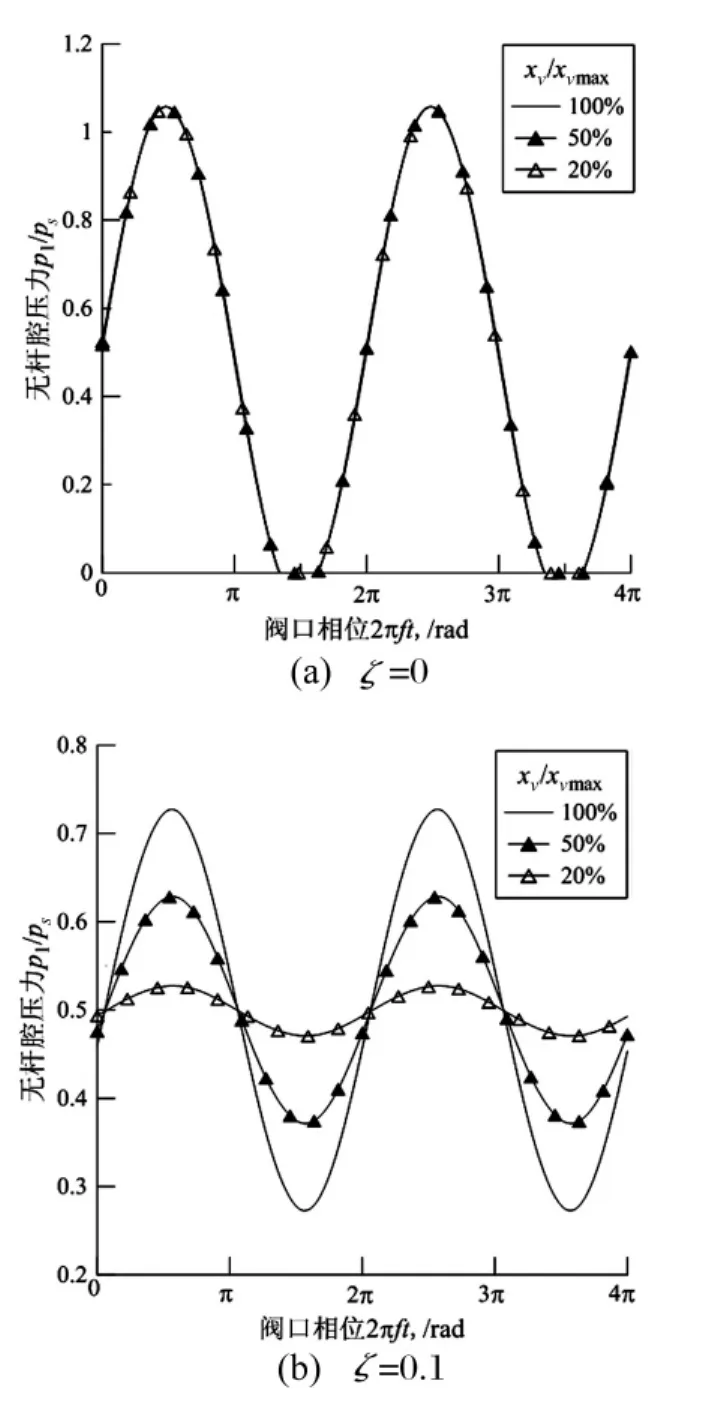
图9 负载压力无量纲图Fig.9 Load pres.dimensionless graphs
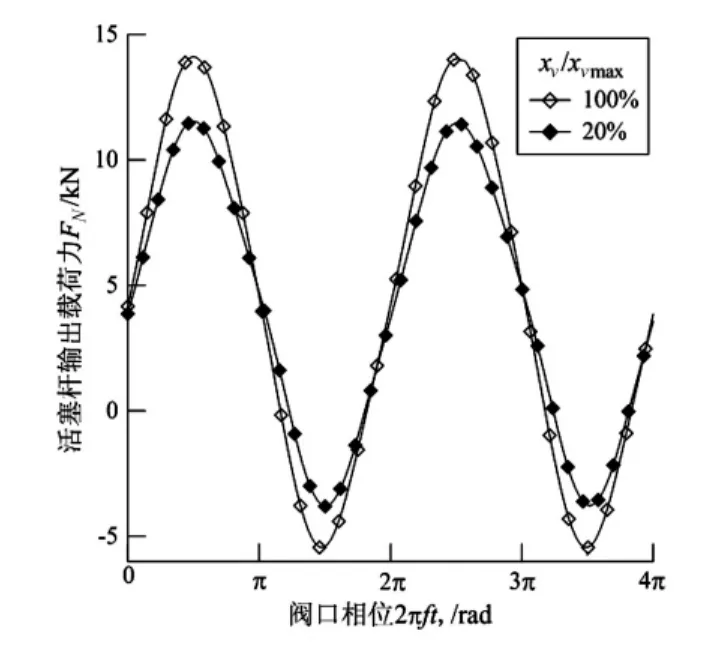
图10 载荷力Fig.10 Load force graphs

图11 液压激振力Fig.11 Hydraulic exciting force graphs
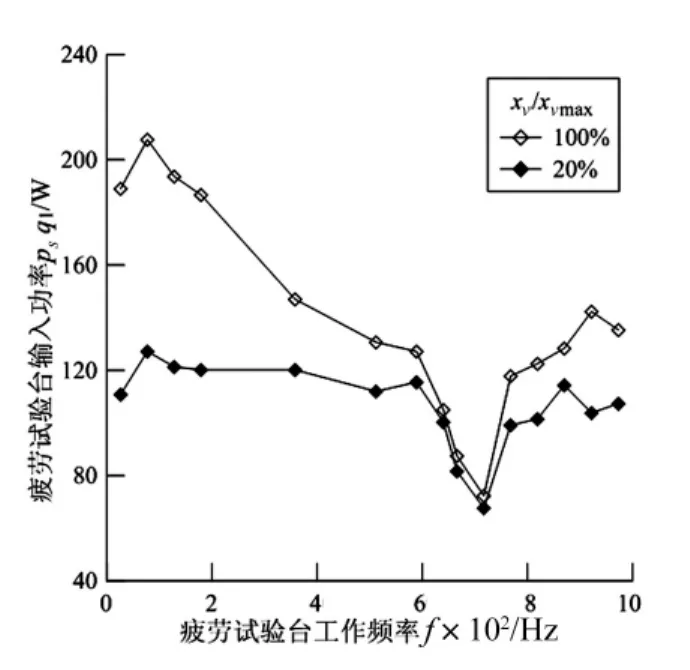
图12 系统输入功率Fig.12 Power inputted to the test rig under diff.working frequency
4 实验研究
搭建试验平台,测取谐振频率为717 Hz时的工作参数。图10、图11分别为疲劳试验台液压缸活塞杆输出的负载力FN与液压激振力波形,与仿真波形比较(图7、图9)有两点显著区别,一为波形发生偏置,二为波形幅值变化随阀口轴向开度xv变化不明显,主要是仿真研究时假设排油管路背压为零,而实际工作时,由于排油管路过长、阀口阻尼影响等因素,导致活塞杆偏置振动,使活塞杆输出载荷力与液压推力发生偏置;另外,仿真时选用的粘性阻尼比与疲劳试验系统产生的粘性阻尼特性存在偏差,故出现实际波形幅值变化对xv响应与仿真不同。
图12描述了该试验台在不同阀口轴向开度xv、不同工作频率所需输入功率,在谐振频率段工作时,试验台所消耗的功率显著降低,且受阀口轴向开度影响较小。表明采用2D阀控单出杆液压缸电液疲劳试验技术方案,易实现高频谐振,且谐振点附近工作时能有效降低能量消耗,阀口轴向开度越大,节能效果越显著。
5 结论
本文对采用二位三通2D阀控制单出杆液压缸构成的变谐振电液疲劳试验台进行数学建模及建立SIMULINK仿真模型,并对疲劳试验台谐振工况进行仿真与实验研究。结果表明,该方案较易实现高频谐振,能产生较大载荷力与激振力,且幅值可控,与非谐振工况相比节能达40%~50%。实验结果与仿真结果存在偏差原因主要由于实际工作中油源压力存在脉动、排油管路存在背压及试验台实际参数存在误差等造成。实际工作中,可通过增加偏置阀、蓄能器等手段消除对上述因素产生的影响。
[1]骆涵秀,陈 行.谐振式电液伺服疲劳试验台谐振频率的计算方法[J].试验技术与试验台,1983(3):10-17.LUO han-xiu,CHEN xing.Computing method to the resonant frequency of resonant electro-hydraulic servo fatigue test rig[J].Test Technique& Test Rig,1983(3):10-17.
[2]Morgan J M,Milligan W W.A 1kHz servo-hydraulic fatigue testing system[C].Proceedings of the Conference"High Cycle Fatigue of Structural Materials",TMS,Warren dale PA,1997:305-312.
[3] Ruan J,Burton R T.An electrohydraulic vibration exciter using a two-dimensional valve[J].Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering, 2009, 223(2):135-147.
[4]贾文昂,阮 健,李 胜,等.电液四轴高频结构强度疲劳试验系统[J].振动与冲击,2010,29(5):86-90.JIA Wen-ang,RUAN Jian,LI Sheng,et al.A four-axis high-frequency structural strength fatigue test system[J].Journal of Vibration and Shock,2010,29(5):86 -90.
[5]李洪人.液压控制系统[M].北京:国防工业出版社,1990.
[6]Herbert E M.Hydraulic control sytem[M].New York:John Wiley & Sons,INC Press,1967.
[7] Medhat K,Khalil B.Interactive analysis of closed loop electrohydraulic control systems[C].13thInternational Conference on Aerospace Sciences &Aviation Technology,2009,5:1 -10.
[8]黄永安,马 路,刘慧敏.MATLAB7.0/Simulink 6.0建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.
[9]王正林,龚 纯,何 倩.精通MATLAB科学计算[M].北京:电子工业出版社,2007.
[10]余成波,陶红艳,张 莲,等.信号与系统[M].北京:清华大学出版社,2007.
[11]王 济,胡 晓.MATLAB在振动信号处理中的应用[M].北京:中国水利水电出版社,2006.
[12] Bai J P,Ruan J,Pan G Q,et al.Simulation research on the dynamic characteristics of a novel electrohydraulic vibration exciter[C].IEEE International Conference on Mechatronics and Automation,Volume IV,2009:3650 -3655.
Dynamic characteristics of electro-hydraulic resonant fatigue test rig
BAI Ji-ping1,2,RUAN Jian1,JIA Wen-ang1
(1.MOE Key Laboratory of Mechanical Manufacture and Automation of Zhejiang University of Technology,Hangzhou 310014,China;2.Marine College,Zhejiang Institute of Communication,Hangzhou 311112,China)
Electro-hydraulic resonant fatigue test rig is mainly composed of an asymmetric cylinder and a two-way three-position two-dimensional highly rotational valve(Abbr.2D valve).The change of natural frequency of the electrohydraulic fatigue test rig can be achieved by changing the initial length of the non-rod chamber of the asymmetric cylinder.Thanks to its characteristics of broad frequency bandwidth and good high-frequency response,2D valve outperforms conventional electro-hydraulic servo valves which are restricted by bandwidth limit.The system's frequency and amplitude can be controlled by changing the rotation speed of the valve spool and axial opening size.In the paper,mathematical and simulation models were established for the variable resonant electro-hydraulic fatigue test rig where 2D valve control technology were applied.Simulation and experimental studies on the test rig's resonant working condition were also conducted.The results show that,when the fatigue test rig is working at resonant condition,the output waveforms of the displacement(load force)and the exciting force are better,and the energy consumption is lower.
electro-hydraulic system;fatigue test rig;resonance;dynamic characteristics
TH81
A
国家自然科学基金项目(51105337);浙江省教育厅科研项目(Y200907081);浙江工业大学校级自然科学研究基金项目(2011XY005)
2012-04-24 修改稿收到日期:2012-06-06
白继平 男,博士生,副教授,1976年5月生