基于改进ART神经网络的液压系统故障诊断研究
2013-01-24吴小川
熊 钰,吴小川,钱 凯
Xiong Yu,Wu Xiaochuan,Qian Kai
(重庆交通大学 机电与汽车工程学院,重庆 400074)
0 引 言
液压系统因其独特的优点在日常生产中得到了广泛的应用。因为液压管路内油液流动状态、液压件内部的零件动作、以及密封件的损坏等情况一般看不见摸不着,所以给人们观察分析带来很多麻烦和困难[1]。目前的故障诊断专家系统大体分为两类:一类是运用模糊故障树理论[2-4],该方法中人为因素对故障诊断结果影响太大;另一类是基于神经网络,主要有BP网络[5]和RBF网络[6],但是大多数都存在“稳定性”和“适应性”两难状况,对于比较复杂、庞大的系统而言,事倍功半。Amesim能够较好地实时仿真液压系统工作情况,Amesim_HCD库更能为使用者建立各种非标准元器件进行仿真[7-9]。基于自适应共振理论的神经网络[10-12](ART网络)能克服该问题,且对于模式识别和分类具有良好的效果。
1)通过对各模式特征量的距离敏感因子,来调整输入模式的特征矢量,提高诊断的效率和精度。
2)建立一种改进的ART网络权值学习算法,能够使神经网络训练过程向输入模式方向加速收敛,以墨西哥草帽函数建立的邻域函数能够使距敏感特征近的区域对模式分类的影响加强,较远的区域影响减弱。
3)运用Amesim_HCD库建立完整的液压泵、换向阀和液压缸Amesim模型,以及完成起重机液压系统Amesim仿真建模,并以此对起重机液压系统故障仿真,为工程问题的解决提供一条新的思路和指导方法。
4)用改进 ART神经网络算法开发起重机液压系统故障诊断专家系统,验证该方法故障诊断可靠性,试验结果表明该专家系统故障诊断正确率达92%。
1 ART神经网络
ART-1结构(见图1)由2层神经元分别称为比较层和识别层组成。类别判决由在识别层中的1个单一神经元来作出。该网络包括3个附加模块:增益1,增益2和复位模块[13]。子系统包括两层具有前馈和后馈的神经元(比较层和识别层)。该系统决定输入模式是否与已存储的1个模型相匹配。如果匹配,就会产生共振。定位子系统负责检测在识别层自下而上和自上而下模式之间的失配情况。
识别层作用是计算输入矢量与聚类中心之间距离测度,当低于预先设置的门限时,必须创建一个新的类别并且将输入矢量存于该类别中。如果通过了警戒门限,获胜神经元就会被训练,使其在特征空间中相应的聚类中心移向输入矢量。
识别层神经元i输出可由下式表示:
其中,xj是比较层神经元输出;f为1阶梯函数;m是比较层神经元数目。
ART-2结构(见图2)是在ART思想(具有2层结构和在 2个方向可修改权值,即前馈和反馈权值)的基础上建立的。ART-2和ART-1均包含1个注意子系统和1个定向子系统[14]。
相比ART-1,ART-2的比较层已经分成几层,增加了节点,所以ART-2的预处理比ART-1网络中预处理复杂得多。但是,取向子系统的修改可以处理实数值数据。ART-2还可以通过适当地更新类别原理,自适应地反映环境中最常见的模式类型,且允许噪音抑制。
2 特征样本的提取
现有N个样本组成的含I个类的特征集,每个样本有m个特征量,第j个样本的第m特征量用表示[15]。
计算所有N个样本第m特征量的标准方差和样本均值
由属于第i类的Ni个样本计算第m个特征量标准方差和样本均值
计算第m特征量的类中心加权标准方差
式中,μ1为平方类中心;μ2为类中心;gim为属于第i类样本的第m特征量中心;gm为所有样本的第m特征量中心;ρi为第i类先验概率,且。
计算第m个特征的距离敏感因子[16],并正则化处理
这样经过处理后,就得到了神经网络的输入样本X。
3 ART神经网络学习算法改进
神经网络的学习率和邻域采取何种递减方式,对学习的收敛速度和聚类精度都很关键。幂函数递减,聚类结果最好,收敛也快[18]。所采用的递减方式为
式中,a1为常数,一般取0.05。
根据神经生物学观点,侧反馈的强度应与邻域内神经元i同获胜神经元的距离有关。墨西哥草帽函数适合作为邻域函数
式中,(t)为邻域的有效宽度;rij为竞争层神经元间的距离。
其中,wi,wj分别为竞争性神经元间的权值。并且采用幂函数递减:
式中,参数a2为常数,一般取0.5。由此得出用邻域函数调整神经网络权值的学习算法:
在不断的迭代过程中,该学习算法使得属于敏感区域近邻域范围内的特征对该类区分的影响逐渐加强,而邻域范围之外的区域对区分该类故障的影响减弱。同时采用非线性函数的形式,使得其收敛速度更快。
神经网络识别层输出
式中,为神经网络的门限值,∈[0,1],在训练初期数值设定为0.6,在神经网络训练后期和应用阶段设置为0.8,提高诊断精度。也可使在0到1范围内以0.05增量变化,观察分类情况,以确定各个时期取值。最后,得出神经网络输出矢量Out。
4 改进ART神经网络的建立
4.1 学习阶段一
1)计算属于各训练类别的原始输入矢量的m个特征量,并归一化后得矢量X。取=0.5,计算距离敏感因子,简化得到输入矢量X。
2)初始化ART网络权值wij,输入新样本矢量。其中,Xm(t)为t时刻对应的第m个特征量。总的学习次数为。
3)当输入某一类样本时,竞争层对应的神经元i被激活,此时yi最大,并计算神经元i与其他竞争神经元之间的欧氏距离rij。
总酸含量是反映酱油品质的主要指标之一,各有机酸与相应醇类经酯化反应可生成具有芳香气味的各种酯,从而赋予酱油特殊的风味[27],但过高的总酸能使酱油酸味突出,降低酱油的品质。《GB2717-2003酱油卫生标准》[28]中严格规定总酸含量不得超过 2.5 g/100 mL,本试验所检出的总酸含量均在标准限值之下,如图2。
4)计算邻域函数值。
6)学习率和邻域宽度递减。
7)步骤3),直至所有学习样本全部学习一遍。
8)t=t+1,直到t>T1时结束。
4.2 学习阶段二
T2=200,η0=0.04,δ0=1,ξ=0.8,并重复2)~6),邻域宽度和学习率按照下式递减
选取另一组样本矢量提供网络输入,返回,直到样本输入结束或增益项的值减小至0,即兴奋神经元与输入样本稳定对应为止。
t=t+1;当t>T2时,学习阶段结束。存储并输出所有输出神经元的连接权系数,ART神经网络训练完毕。建立改进ART神经网络液压系统故障诊断系统流程如图3。
5 基于改进ART神经网络的故障诊断专家系统
液压系统故障多种多样,改进ART神经网络对于故障的多样性诊断具有很大的优势,神经网络处理数据的效率高,且信息量的分析比较全面,极大地提高了诊断的可靠性。运用VB6.0开发起重机液压系统故障诊断专家系统,以Access为工具建立专家系统数据库。如图4所示,启动专家系统。
根据起重机液压系统的各部件特征,运用Amesim_HCD库建立液压泵、换向阀、液压缸模型,并建立如图5所示的Amesim起重机液压系统模型。
分别对液压系统的三位四通换向阀参数、泵参数、缸参数设定,并根据工程实际选择所拖动的负载质量为8 000 kg,液压缸行程1 m。进入仿真模块,设置仿真的步长为0.1 s,仿真时长为60 s。各部件主要参数见表1。
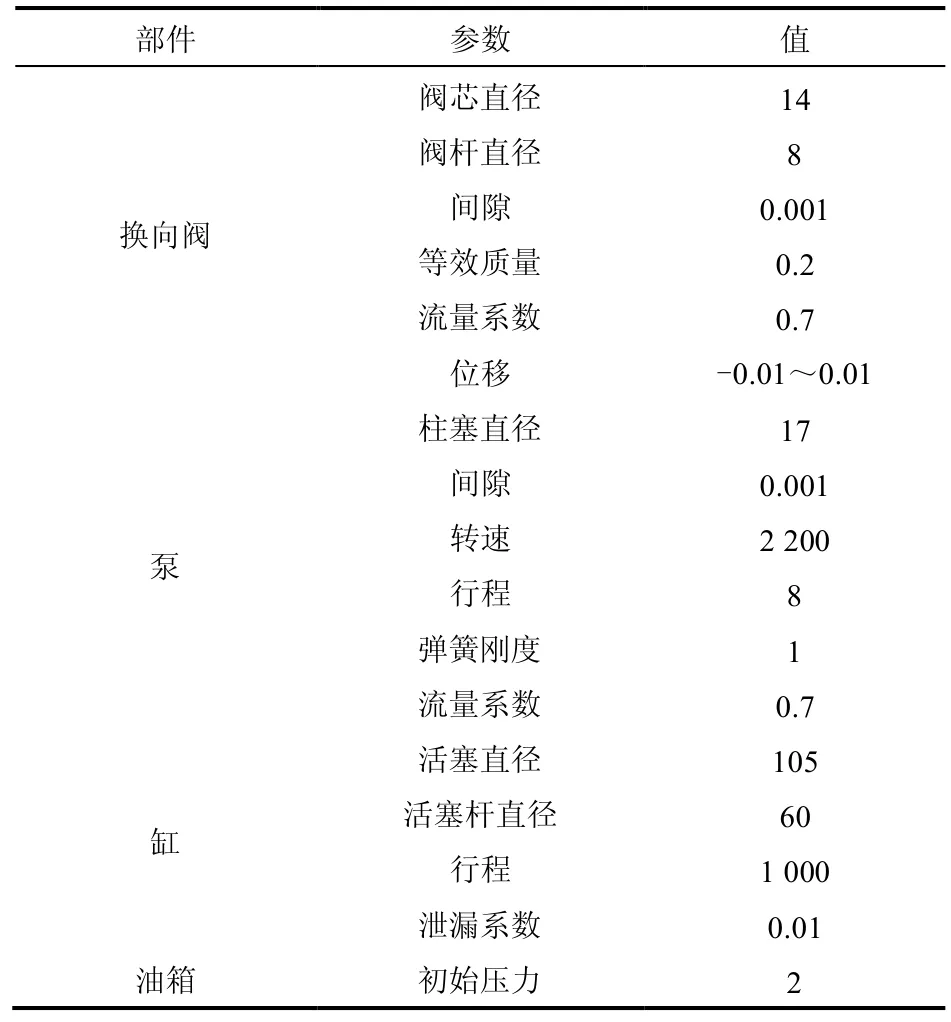
表1 起重机液压系统仿真模型参数表
根据所建立的起重机液压系统仿真模型,仿真得到系统各参数正常使用的负载运动速度、负载位移变化、蓄能器压力变化和液压缸压力变化,如图6所示。
根据已经建立的液压系统故障诊断模型,设置各液压系统故障所对应的参数,对液压系统故障仿真。具体的故障和参数见表2。
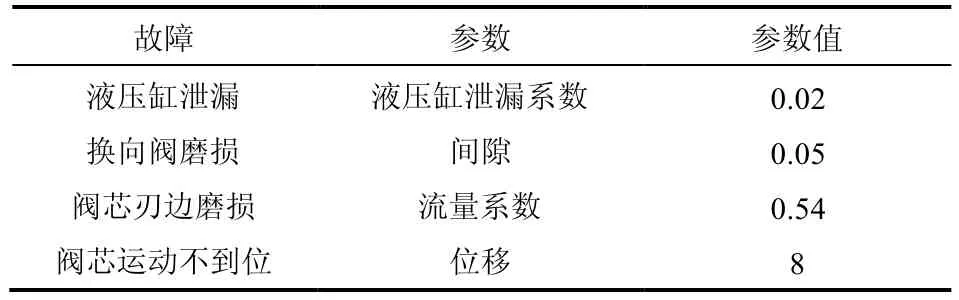
表2 液压系统故障仿真参数表
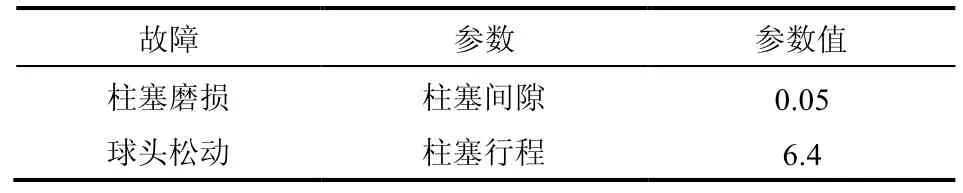
续表2
通过对起重机液压系统某些参数设定,得到某一类故障发生时所对应的系统参量变化情况,并多次仿真,保存得到的故障样本,用于检验所建立的改进ART神经网络故障诊断专家系统对故障诊断的可靠性。调节液压缸泄漏系数为 0.02,仿真结果如图7所示。
将仿真获得的起重机液压系统故障参数导出,运用复杂样本方差估计样本提取方法,计算各类故障的参量的距离敏感因子,得到处理后的样本,再对样本进行补编码工作,得到表征某类故障的输入样本X。向改进ART神经网络输入样本X后,与之相对应的竞争层神经元被激活,输出层输出对应结果。重复上述工作,改进 ART神经网络专家系统训练。故障仿真结果对比分析如图8所示。
从图 8可以看出,起重机液压系统压力、负载运动速度均发生明显变化,液压缸的泄漏增大会使系统的压力明显下降。8 t汽车起重机液压系统正常工作时的压力为 6.5 Mpa,而泄漏增大以后,压力降到5.7 Mpa。液压系统负载运动速度从0.023 m/s降至0.021 m/s,说明液压缸的泄漏导致爬行故障。此外还导致液压缸工作时间延长,液压系统工作处于故障状态。
将训练结束后的改进ART神经网络专家系统应用于已知故障工作状态的起重机液压系统故障诊断中,通过实时检测系统压力、流量、温度参数变化,将所测得的结果后处理,然后输入液压系统故障诊断专家系统,对液压系统故障诊断的正确率进行分析。将50组故障测量结果输入起重机液压系统故障诊断专家系统以后,有46组诊断正确,4组错误,正确率达92%。取系统采样频率为2 000 Hz,得到起重机液压系统压力变化结果,如图9所示。
对比仿真结果,不难发现起重机液压系统压力发生明显变化,液压缸的泄漏增大使得系统压力明显下降。8 t汽车起重机液压系统正常工作时的压力为6.5 Mpa,而泄漏增大以后,压力平均值降到5.47 Mpa,与仿真结果对比,仿真误差率为4.12%。说明仿真结果可信,将其运用到改进ART神经网络训练可以较好地模拟实际故障状态。将所得结果处理以后输入起重机液压系统故障诊断专家系统,得出故障诊断结果,如图10所示。
综上所述,基于改进ART神经网络的起重机液压系统故障诊断结果与事实相符,实现对液压系统故障的准确诊断,故障诊断正确率达 92%,同时还给出了排除故障的建议与方法,可以将起重机液压系统故障诊断专家系统应用在工程实际中。该改进ART神经网络专家系统在使用过程中得到不断完善,为工厂节省维修费用,带来可观的经济效益。
6 结 论
文中提出的改进ART神经网络起重机液压系统故障诊断方法,对于起重机各种故障诊断准确、迅速、可靠。并以Windows、Visual Basic 6.0语言作为软件开发环境,开发了基于改进ART神经网络的起重机液压系统故障诊断专家系统。该改进ART神经网络和以往的故障诊断方法相比,具有以下几个明显的优点:
1)通过计算各故障模式特征量的距离敏感因子,来调整输入模式的特征矢量,提高诊断的效率和精度。
2)提出一种改进的ART网络权值学习算法,将墨西哥草帽函数作为邻域函数,使得距敏感特征近的区域对模式分类的影响加强,较远的区域影响减弱,加速了神经网络训练时的收敛过程。
3)运用 Amesim_HCD库建立液压泵、换向阀和液压缸结构模型,完成起重机液压系统Amesim仿真建模,并以此对起重机液压系统故障仿真,为工程问题的解决提供了一条新的思路和指导方法。
4)用改进 ART神经网络算法开发起重机液压系统故障诊断专家系统,并验证其可靠性,故障诊断准确率达92%。
[1]张平格,杨志刚.液压系统故障诊断专家系统研究[J].液压与气动,2010,5:22-23.
[2]Hurdle E.E,Bartlett L.M,Andrews J.D.Fault diagnostics of dynamic system operation using a fault tree based method [J].Reliability Engineering and System Safety,2009,94(9):1371-1380.
[3]Tariq Assaf,Joanne Bechta Dugan.Automatic Generation of Diagnostic Expert Systems from Fault Trees.Annual workshop on reliability and maintainability,2008:143-147.
[4]赵懿冠,苏欣平.基于故障树分析法的汽车起重机液压系统故障诊断研究[J].液压与气动.2010,3:29-31.
[5]陈维,陈永革,赵强.基于 BP神经网络的装备故障诊断专家系统研究[J].指挥控制与仿真,2008,30(4):103-105.
[6]李连峰.基于 RBF网络的游梁抽油机减速箱轴承故障诊断[J].科技资讯,2010,35:57-58.
[7]Wang Dejun,Xing Tianliang,Lin Chengdong,et al.Fault diagnosis of automobile engine based on support vector machine.2011 3rd International Conference on Advanced Computer Control,ICACC2011,p320-324,2011.
[8]司癸卯,张青兰.基于Amesim液压破碎锤液压系统建模与仿真[J].中国工程机械学报,2010,8(2):179-183.
[9]Xuanyin Wang,Xiaoxiao Li,Fushang Li.Analysis on oscillation in electro-hydraulic regulating system of steam turbine and fault diagnosis based on PSOBP.Expert Systems with Applications,v 37,n 5,p3887-3892,May 2010.
[10]Jay A.Swope.ARTdECOS,adaptive evolving connectionist model and application to heart rate variability.Evolving Systems.DOI:10.1007/s12530-012-9049-20.
[11]Xuan Hou.Research on quantum adaptive resonance theory neural network.Proceedings of 2011 International Conference on Electronic and Mechanical Engineering and Information Technology,EMEIT 2011,v8,p 3885-3888.
[12]徐增丙.基于自适应共振理论的混合智能诊断方法及应用[D].武汉:华中科技大学,2009.
[13]贺湘宇.挖掘机液压系统故障诊断方法研究[D].长沙:中南大学,2008.
[14]Kim,Cheoltaek,Lee,Ju-Jang.Incremental learning framework for function approximation via combining mixture of expert model and adaptive resonance theory.Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation,ICMA 2007,p 3486-3491.
[15]Upendar,J.Fault classification scheme based on the adaptive resonance theory neural network for protection of transmission lines.Electric Power Components and Systems,v 38,n 4,p 424-444,January 2010.
[16]金勇进,谢佳斌.复杂样本的方差估计——基于逆抽样设计的方法[J].数据,2009,11:58-59.
[17]刘进涛,王万森.对于模糊ARTMAP的研究及改进[J].计算机技术与发展,2006,16(11):16-19.
[18]Sylvain Verron,Teodor Tiplica,Abdessamad Kobi.Fault diagnosis of industrial systems by conditional Gaussian network including a distance rejection criterion[J].Engineering Applications of Artificial Intelligence 2010,23:1229–1235.
