纯电动环卫车整车控制单元的开发
2013-11-05吴明瞭刘晓谦
汪 斌 ,吴明瞭,刘晓谦,李 良,卢 佳
Wang Bin,Wu Mingliao,Liu Xiaoqian,Li Liang,Lu Jia
(东风汽车股份有限公司商品研发院,湖北 武汉 430057)
在国家《电动汽车科技发展“十二五”专项规划》中,纯电动汽车受到了相当大的关注,是国家实现产业升级、技术转型和科技跨越的必然要求[1]。但限于当前电池技术的发展水平,大规模个人使用纯电动车辆还有很多困难。调查发现,政府主导的市政环卫车辆对于纯电动车型有相当大需求量,这体现了政府对电动车发展的支持与鼓励,为推动电动汽车事业向前发展有重要影响。
1 系统结构与功能定义
文中的纯电动环卫车采用前置后驱的模式,结构如图1所示,主要部件包括:整车控制单元、电动机及其控制单元、动力电池包及其管理单元、手动变速器、主减速器、DCDC、电动转向泵和电动打气泵等,由于环卫车一般在市内工作,运行条件和充电条件较好,因此该车不设置车载充电机,依靠外接充电。
整车控制单元对驾驶员的加速踏板、换挡等操作进行识别,进而控制车辆的运行,实现整车定义的动力性、经济性指标,同时实现安全性指标。因此,整车控制单元是整个控制系统的核心[2],具体需要实现的功能及其功能描述列于表1。
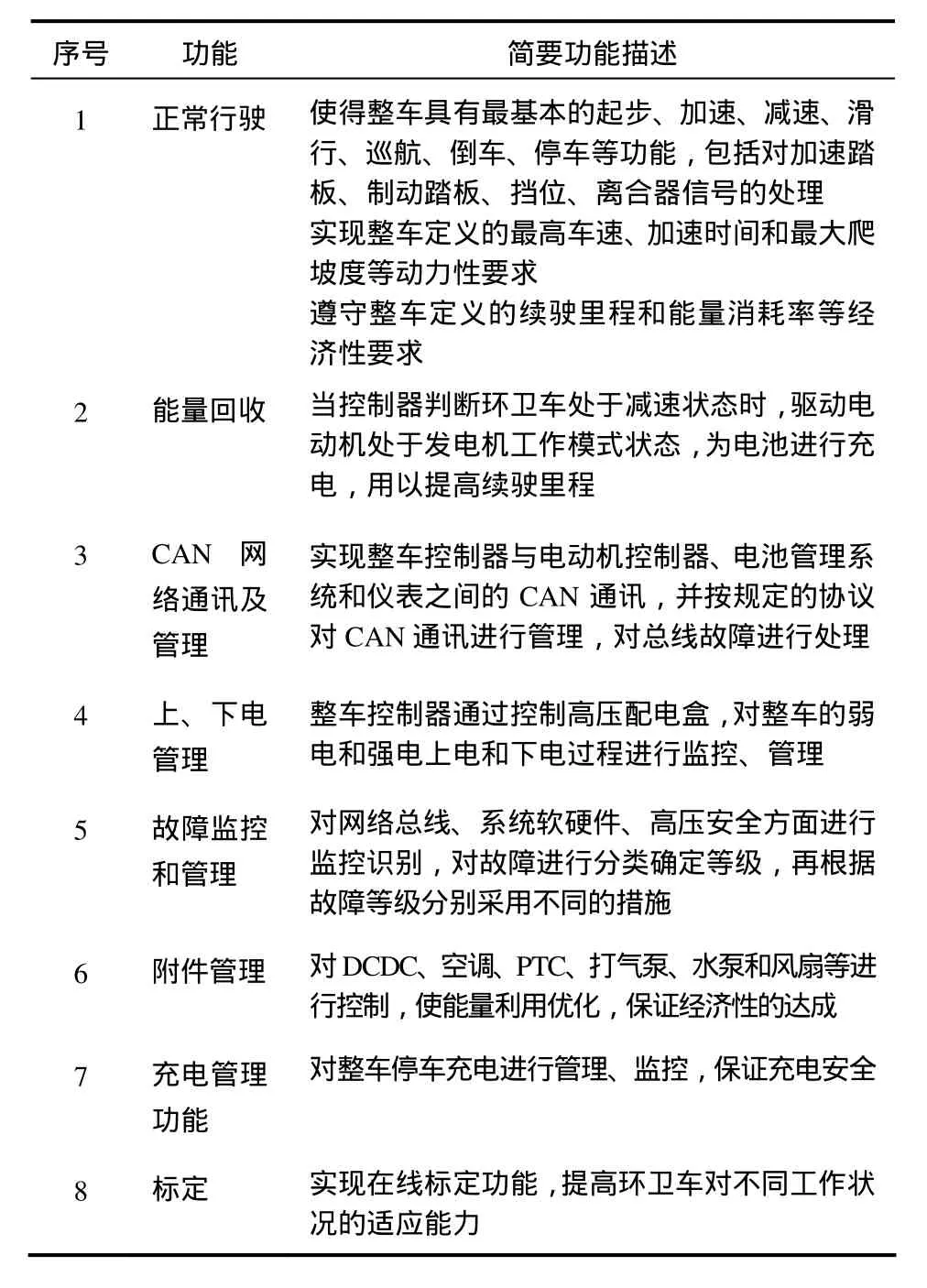
表1 整车控制单元功能定义及简要描述
2 硬件平台
根据整车控制单元需要实现的功能设计控制器的硬件,包括:
1)外壳结构设计。需实现整体防护要求达到IP67,为此选用的插接件为ECU专用的成熟产品,防护性能高,且经过实际应用检验。
2)电源模块。控制器设计工作电压为 DC24 V,电压适应范围为DC16~32 V。
3)输入输出接口模块。完成数据采集滤波和控制指令的发出。控制器设计有2路CAN总线,分别用于行车时的数据通信和停车充电时的通讯。为保证数据的可靠传输,对需要的地方进行光耦隔离。
4)算法处理单元。这是整车控制单元的核心部分,实现了控制算法的硬件基础。采用Freescale公司成熟的S12系列16位微处理器,能够保证算法计算的实时性。
5)电路设计。电路设计除考虑常用需要外,重点应满足电磁兼容性的要求。
3 软件设计
控制单元的软件结构大体分为上层程序和底层程序。其中,上层程序指控制策略的实现部分,是满足控制功能的核心部分;底层程序主要是对硬件设备进行控制,是控制单元稳定可靠运行的保证。
3.1 上层算法设计
为实现表 1中的功能,控制器软件将整车工况状态划分为多种模式,每种模式都对入口条件进行判断:软件根据加速踏板位置、制动踏板位置、挡位、离合器状态、电动机状态和电池状态综合分析判断当前整车处于何种状态。每种状态下,定义了控制器应当采取的应对措施,产生并发出控制信号。这些控制信号基于整车转矩控制,同时也限制电动机的运行最高转速。例如,对正常行驶状态的判断是:上电完成,未发驻车信号,未挂空挡,未踩离合器,加速踏板踩下,此时,根据加速踏板开度的大小计算相应的目标转矩,此转矩值通过CAN总线发送至电动机控制单元,通过电动机控制单元对电动机电流进行控制。
3.2 底层软件设计
控制单元的主程序无限循环运行,进入主程序之前,首先需对控制单元的各个端口进行初始化,使其处于正常工作状态。进入主程序后,通过底层程序采集端口上的信号,并送入主程序中的控制算法进行计算,然后将算法计算所得到的各种控制量通过底层软件发送出去,传送给其他执行器的控制单元,实现整车控制。
4 实车道路试验
实车基本参数列于表2。
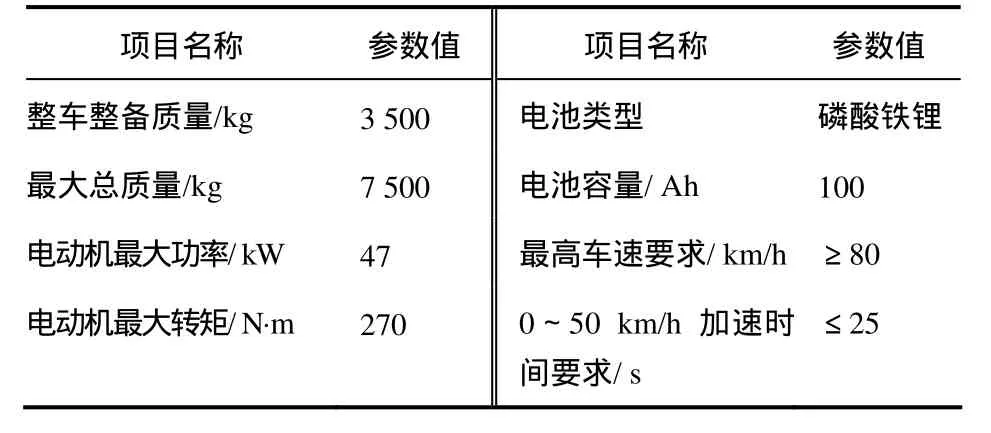
表2 纯电动环卫车基本参数
在襄阳试车场进行实车实际道路试验,累计试验里程已超过20000 km,整车控制单元各项指标都经受住实际检验,安全有效。
5 结束语
针对纯电动市政环卫车的使用工况和条件,设计定义了整车控制需要满足的功能,并实现相应的软、硬件设计与自主开发,具有自主知识产权。通过实车试车场试验表明,所开发的控制单元能较好地满足预定的功能和性能设计目标。
[1]中国科技网. 电动汽车科技发展“十二五”专项规划(摘要)[EB/OL]. http://www.stdaily.com/,2012-03-03.
[2]罗水平. 纯电动汽车整车控制器开发的探讨[J]. 海峡科学,2010,(12):64-67.
