UPFC提高双馈风电机组稳定性的动态仿真分析
2013-01-22王维庆王海云饶成诚
吴 寒 ,王维庆 ,王海云 ,饶成诚 ,刘 凯
(1. 教育部可再生能源发电与并网控制工程技术研究中心,乌鲁木齐 830047;2. 新疆大学电气工程学院,乌鲁木齐 830047;3. 周口供电公司,河南 周口 466000)
前言
风电场的稳定性日益成为制约风电并网的关键因素。风力机脱网将对电网造成严重后果,这就要求并网风电机组具有低电压穿越能力(LVRT)[1]。文献[2]在系统故障期间投入撬棒电路(Crowbar),对双馈风电机组(DFIG)转子侧变流器进行短接保护,但这使得双馈风力机运行在异步发电机工况,并从电网吸收大量无功功率。文献[3]通过DFIG网侧变流器(GSC)和转子侧变流器(RSC)并联运行对并网系统进行无功补偿。
新型电力电子器件不断涌现,为提高风电并网系统安全稳定运行能力提供了有效途径[4]。统一潮流控制器(UPFC)串联侧变流器能够改变串联变压器两端电压值控制线路潮流,并联侧变流器能够改变发出功率控制节点电压[5],因此UPFC可将风电场视作无功负荷,并提供无功补偿与电压控制,提高风电场并网系统的暂态稳定能力。
针对短路故障期间,双馈风电机组利用自身背靠背变流器控制电磁转矩和无功功率方案不足以维持风电机组的安全稳定运行的现状,并且撬棒保护电路在故障期间频繁投入与退出可能引起电磁转矩的波动问题,提出了用统一潮流控制器(UPFC)提高双馈风电机组的故障穿越能力。
文献[6]应用仿真软件EMTP对UPFC进行动态建模仿真。文献[7]对UPFC并联无功补偿结合串联补偿功能进行了仿真分析。
本文以双馈风力发电机和UPFC的数学模型及控制策略为基础,在电力系统分析软件DIgSILENT/PowerFactory下建立了含UPFC的风电场并网系统模型,仿真结果验证了本文所提方案的有效性。
1 故障时DFIG保护及控制系统原理
图1为双馈异步风力发电机在故障运行状况下的保护与控制原理框图。
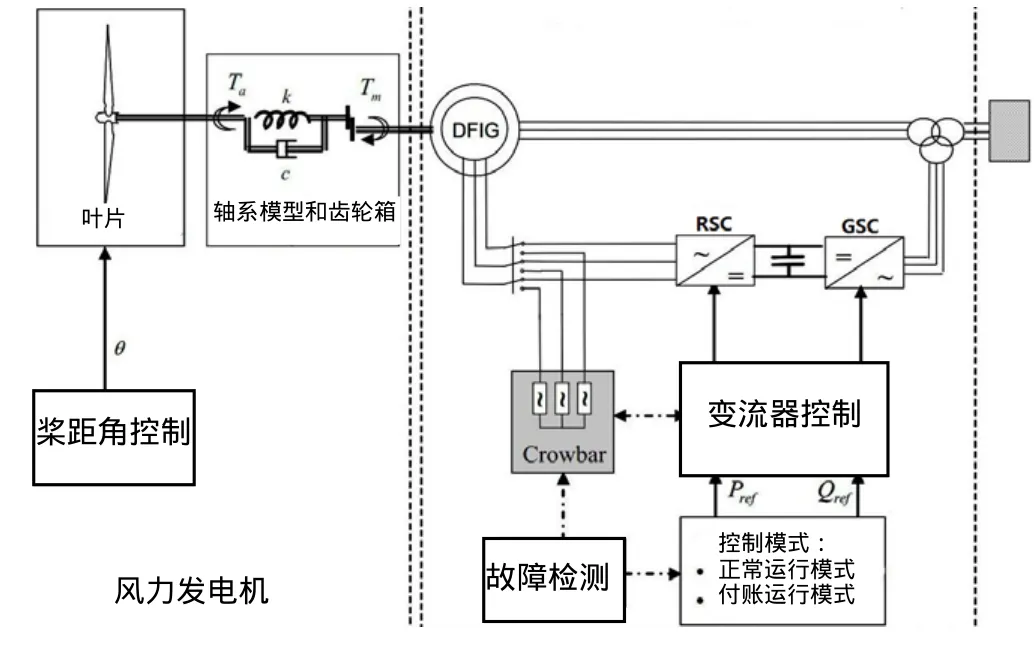
图1 双馈感应电机综合控制系统示意图
图中RSC为转子侧变流器,GSC为电网侧变流器。正常运行时,桨距角为 0°,当风速超过额定风速或者有功超过额定值时,增大桨距角可以限制双馈风电机组的有功功率。图中对于变流器的无功控制,转子侧变流器Qref根据稳态运行时,接入点无功功率交换的程度要求设定为不变值,电网侧变流器Qref设定为零,正常工作时转子和电网间不进行无功交换,当转子侧变流器电流超过设定值时,撬棒电路投入运行,转子侧变流器被短路,电网侧变流器以及定子侧仍与电网连接。
1.1 转子侧变流器暂态电压控制器模型
双馈机组转子侧变流器的控制见图2。

图2 转子侧变流器电压控制模型
该电压控制器根据给定电网电压参考值与短路故障期间电网电压实测值相比较,将误差信号送入PI控制器,以此确定双馈风电机组定子发出无功的参考值。采用此暂态电压控制策略,由于暂态电压控制器作用,转子电流幅值与未采用电压控制时相比有所增加,因而对故障时风电机组稳定运行和电网电压快速恢复有较明显的作用。
电网故障时,转子侧电压控制器在电压跌落以及故障后电压恢复期间发出无功功率来参与系统的暂态电压控制,确保双馈风电机组的机端电压能够快速恢复稳定值。
2.2 故障期间桨距角控制模型
风电并网系统发生短路故障时,双馈风电机组的电磁转矩将下降,而此时风力机的机械功率保持不变,使得机械转矩大于电磁转矩,这时风电机组超速。所以需要调节风力机桨距角减小风能捕获,进而减小风力机的机械转矩,稳定风电机组的转速,改善其暂态电压稳定性,桨距角控制框图见图3。
图中,电网侧额定参考有功功率与短路故障期间电网实测有功相比较,将误差信号ΔP=-送入PI控制器,以此确定桨距角
参考值θref,将该参考值与实测桨距角θ相比较,将得到误差信号Δθ送入伺服机制系统,其中Tservo为伺服时间常数。当电网发生故障,桨距角控制系统立即启动,减小风力机的风能转换率和机械转矩,阻止风电机组超速;同时风电机组的有功功率降低,可以使得发电机发出更多的无功功率维持电网电压。
2 UPFC工作原理及其控制策略
图4为UPFC工作原理图,UPFC装置可以看成STATCOM和SSSC装置组成。两个电压型变流器共用一个电容器,从而使SSSC和STATCOM发生耦合。
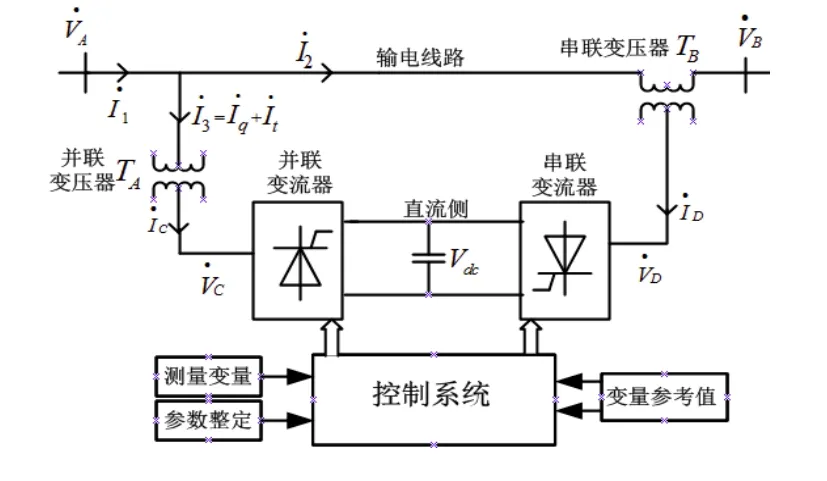
图4 UPFC原理示意图
由图可知,直流侧电容上储存的电场能量的变化率:

并联侧以及串联侧变流器的电流和电压关系为:

式中:Vdc为直流电容电压;和,和分别为并联变流器侧和串联变流器侧的电流和电压;阻抗ZC和ZD分别为并联侧和串联侧的等值阻抗。
UPFC为无源元件,在稳态时必须保持电容电压为恒定常数,即:

UPFC稳态运行向量图见图5,为分析的方便,忽略阻抗ZD的作用。
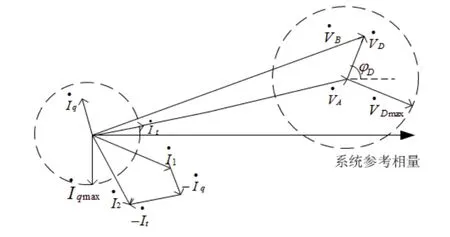
图5 UPFC稳定运行向量图
3 仿真系统及算例分析
3.1 仿真电网结构
本文在DIgSILENT/PowerFactory14.0中建立的仿真系统如图6所示,风电场(装机容量为15MW)并网节点即PCC节点,系统故障取线路最为严重的三相短路情况,在t=0.5s时刻PCC点发生三相短路故障,0.2s后线路保护动作切除故障。大量实践及研究表明,故障情况下运行时,风电场内各台风力机反应类似,因此把风电场作为一个整体简化计算并不会产生很大的误差[8]。

图6 含风电场的电网辐射状网络图
3.2 仿真结果与分析
3.2.1 不安装UPFC时DFIG暂态稳定分析
高阻抗的撬棒保护电路能减小定子电流峰值,但撬棒电阻值设定过高,保护移除瞬间可能引起电流尖峰脉冲[9]。因此仿真中撬棒电阻值取DFIG转子电阻的35倍[10]。若转子电流超过最大限幅值或者DFIG变流器间电容电压超过最大限幅值,撬棒保护电路被触发。
图7~10分别为短路故障前后风电机组机端电压,风电场发出的有功功率、DFIG转子转速以及桨距角调节角度θ。

图7 故障时风电机组机端电压

图8 故障时风电场发出的有功功率
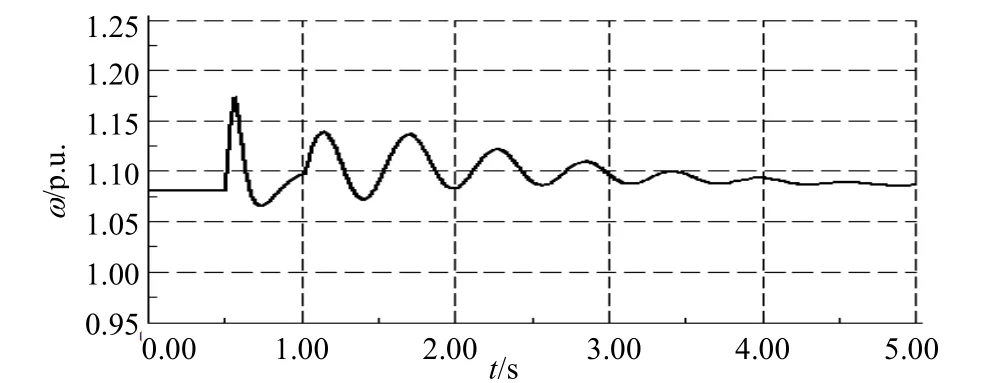
图9 双馈风电机组转子转速

图10 双馈风电机组桨距角调节情况
由图7~10可知,在撬棒保护电路及双馈风力机自身调节能力的影响下,双馈风电机组转子转速在 4.2s左右可达到故障前稳定状态。在故障发生瞬间,桨距角不断增大以限制双馈风电机组的有功功率,3s时桨距角恢复到了故障前的0°。
图11为DFIG转子侧变流器和电网侧变流器之间的电容电压值。

图11 RSC和GSC间电容电压
可见,短路故障瞬间电容电压迅速上升,当电压上升至 3.7p.u.时撬棒保护电路投入运行,使得电容电压值降低。但是故障切除后,撬棒电路仍未退出运行,图11中电容电压值在1s时刻才恢复稳定值,此时撬棒电路退出。此外,撬棒保护电路在故障期间频繁投入与退出可能引起电磁转矩波动。因此从保护设备角度考虑用UPFC来提升DFIG的故障穿越能力。
3.2.2 UPFC提高并网系统暂态稳定性分析
在图6所示仿真算例中接入UPFC装置。图12~15为 PCC点发生三相短路故障前后风电场各电气量情况。
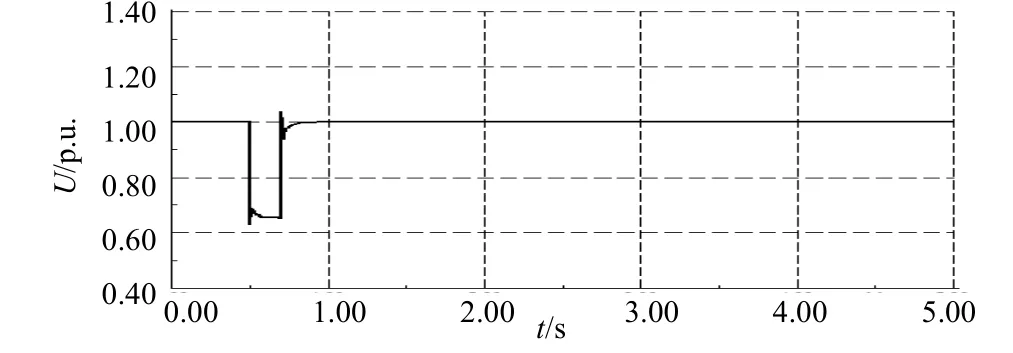
图12 安装UPFC后风电机组机端电压
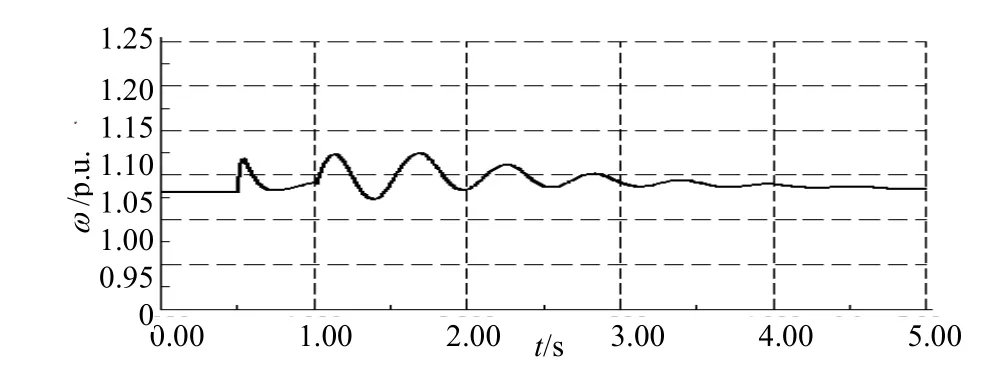
图14 安装UPFC后风电机组转速

图15 安装UPFC后桨距角调节情况
由上图知,安装 UPFC装置后,短路瞬间双馈风电机组机端电压下跌至0.65p.u左右,较未安装UPFC时有较大的提升;故障切除后各电气量波动更小,风电场有功出力更快恢复平稳,并且双馈异步风电机组的转速变得更为稳定,桨距角的调节幅度变小。
在UPFC装置的快速调节作用下,风电机组机端电压下跌幅度变小,风电场输送的有功和转速波动较大等问题得到改善。
图16为 UPFC在风电场故障前后的无功功率贡献。

图16 故障前后UPFC无功贡献情况
图16 可知在故障前以及故障切除后,UPFC装置给风电场提供的无功功率约为3MW,短路故障瞬间,UPFC装置提供充足的无功功率,使得风电场从系统吸收的无功大为减少,以此帮助风电场故障后迅速恢复稳定运行状况,提升了风电场暂态稳定性和故障穿越能力。
4 结论
通过在 DIgSILENT/PowerFactory下建立了含UPFC的双馈风电机组仿真模型系统,验证了 UPFC对并网风电场稳定性的改善作用。仿真结果表明:
(1)仅依靠双馈风电机组自身的调节能力并不能保证故障期间风电场的安全稳定运行,故障穿越能力有待进一步加强。
(2)短路故障瞬间,UPFC能提供充足的无功功率,使得风电场从系统吸收的无功大为减少,帮助风电场故障后迅速恢复稳定运行状况。
(3)UPFC提高了故障期间风电机组机端电压,减小了故障切除后功率和转速的振荡过程,改善了双馈风电机组故障穿越能力。
[1]张兴, 张龙云, 杨淑英, 等. 风力发电低电压穿越技术综述[J]. 电力系统及其自动化学报, 2008,20(2): 1-8.
[2]黄汉奇, 毛承雄, 王丹, 等. 可再生能源分布式发电系统建模综述[J]. 电力系统及其自动化报,2010, 22(5): 1-18, 24.
[3]邹文仲, 袁越, 季泽宇, 等. 变结构双馈风机的低电压穿越能力[J]. 电力系统及其自动化学报,2012, 24(4): 1-6.
[4]李立, 鲁宗相, 邱阿瑞. FACTS对电力系统静态安全性影响评价指标体系研究[J]. 电力系统保护与控制, 2011, 39(8): 33-38.
[5]王锡凡, 方万良, 杜正春. 现代电力系统分析[M].北京: 科学出版社, 2003.
[6]K.Uzunovic, F.Edvina. EMTP transient stability and power flow models and control of VSC based FACTS controllers[D]. Ontario: University of Waterloo, 2001.
[7]Sen K K, Keri A J F.Comparison of field results and digital simulation results of voltage-sourced converter-based FACTS controllers[J]. IEEE Trans on Power Delivery, 2003, 18(1): 300-306.
[8]迟永宁, 王伟胜, 戴慧珠. 改善基于双馈感应发电机的并网风电场暂态电压稳定性研究[J]. 中国电机工程学报, 2007, 27(25): 25-31.
[9]H.Kasem, E.F.El-Saadany, H.H.El-Tamaly,M.A.A.Wahab. An improved fault ride-through strategy for doubly fed induction generator-based wind turbines[J]. IET Renewable Power Generation,2008, 2(4): 201-214.
[10]翟佳俊, 张步涵, 谢光龙, 等. 基于撬棒保护的双馈风电机组三相对称短路电流特性[J]. 电力系统自动化, 2012, 36(4): 1-6.
