浅析微型齿轮与普通齿轮的主要差别
2013-01-08饶振纲
饶振纲
南京炮兵学院
近十几年来,随着微型齿轮传动,尤其是微型行星齿轮传动技术,在国内外不断地出现和迅速发展,已使得微型齿轮获得了非常广泛地应用。目前,多级2Z—X(A)型串联的(见图1-1)和3Z(Ⅱ)型(见图1-2)的微型行星齿轮减速器已在航空航天、现代兵器、汽车、精密机械、伺服控制系统、仪器仪表、医疗器械、机器人和工业机械手等领域已获得了较成功地应用。因此,微型行星齿轮减速器设计已引起人们极大的关注。为了使人们能够正确地进行微型行星齿轮传动的设计工作,首先应该了解:微型齿轮与普通齿轮的主要差别是非常必要的。
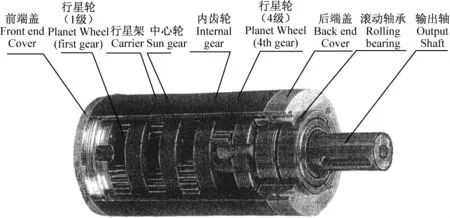
图1-1 2Z—X(A)型多级串联行星齿轮减速器Fig.1-1 2Z—X(A)type multispeed series planet gear speed reducer

图1-2 3Z(Ⅱ)型的微型行星齿轮减速器Fig.1-2 3Z(Ⅱ)type micro planet gear speed reducer
在渐开线齿轮传动中,可以这样定义微型齿轮与普通齿轮:所谓微型齿轮就是齿轮模数m<1.0 mm的齿轮;即可称之为小模数渐开线圆柱齿轮。而普通齿轮就是在齿轮传动中人们较广泛使用的,其模数m≥1.0mm的渐开线圆柱齿轮。由于微型齿轮与普通齿轮在许多方面存在一些差别;因此,在进行微型行星齿轮传动设计时,首先应了解它们之间存在的主要差别是很重要的。
关于微型齿轮与普通齿轮之间的主要差别,现在简单地分析如下:
第一系列:0.1,0.12,0.15,0.2,0.3,0.4,0.5,0.6,0.8。
第二系列:0.35,0.7,0.9。
(2)普通齿轮
普通齿轮是按照国标GB/T 1357—1987规定;微型齿轮的模数范围为m=1~50mm。其模数m系列如下:
第一系列:1,1.25,1.5,2,2.5,3,4,5,6,8,10,12,16,20,25,32,40,50。
第二系列:1.75,2.25,2.75,3.5,4.5,5.5,7,9,14,18,22,28,36,45。
1 国标与模数m的范围
(1)微型齿轮
微型齿轮是按照国标GB 2363—1990规定;普通齿轮的模数范围为m<1.0mm。其模数m系列如下:
2 基准齿形
(1)微型齿轮
微型齿轮按照国标GB 2362—1990规定,其基准齿形见表2-1。

表2-1 微型渐开线圆柱齿轮基准齿形(GB 2362—1990)Table2-1 Microinvolute cylindrical gear reference tooth form(GB 2362—1990)
(2)普通齿轮
普通齿轮按照国标GB/T 1356—1998规定,其基准齿廓见表2-2。
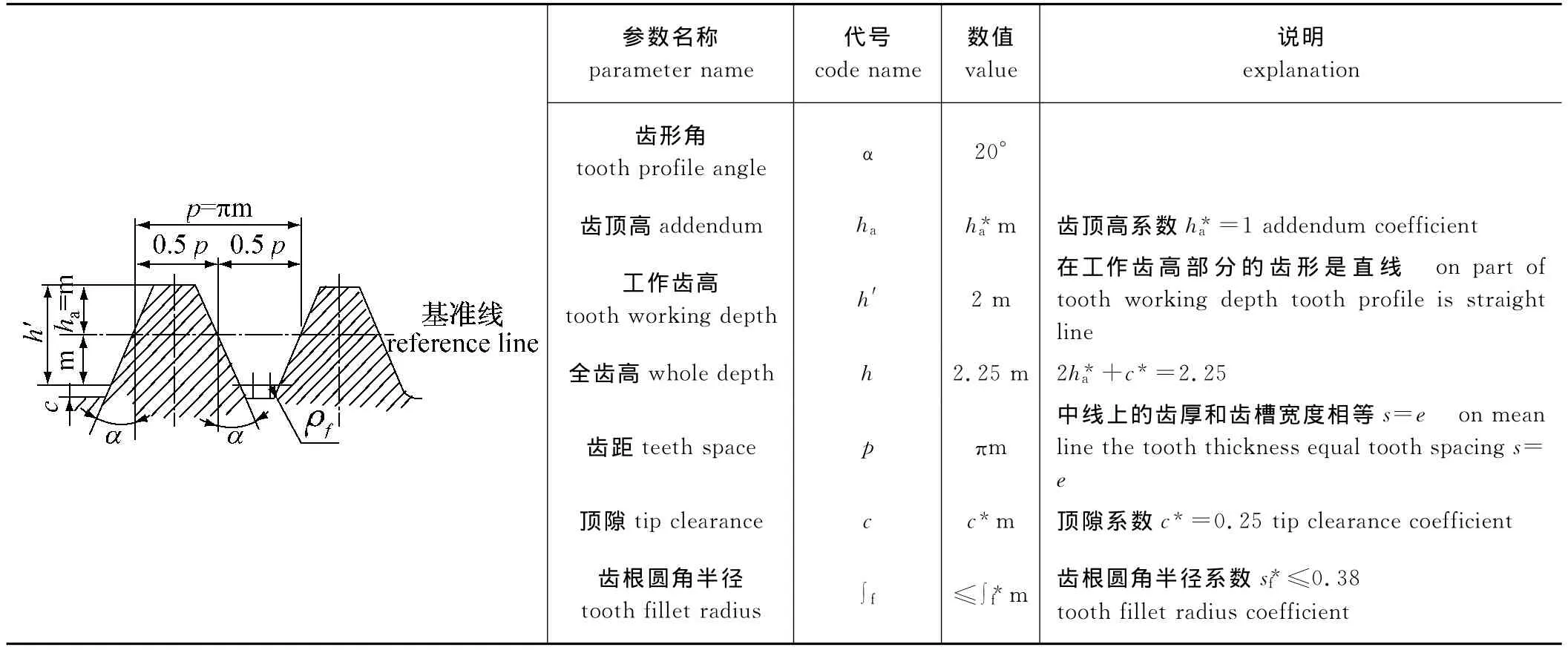
表2-2 渐开线圆柱齿轮基本齿廓(GB/T 1356—1998)Table2-2 Involute cyclindrical gear basic tooth profile(GB/T 1356—1998)
将上述两种齿轮的基准齿形(廓)参数对照比较一下,可以知道:它们的顶隙系数ρ*是不相同的;微型齿轮的顶隙系数为c*=0.35;而普通齿轮的顶隙系数为c*=0.25。还有它们的齿根圆角半径系数ρf*也是不相同的;微型齿轮的齿根圆角系数ρf*<0.2;而普通齿轮的齿根圆角半径系数为ρf*≈0.38。
3 侧隙种类
标准对上述两种齿轮及齿轮副都规定了12个精度等级;精度由高到低依次用数字1—12表示。1、2、3级系发展级,未给出具体的数值。第12级的精度最低。齿轮副中两个齿轮的精度等级一般取成相同的,也允许取成不同的精度等级。对于微型齿轮和普通齿轮的各项公差和极限偏差都是分成Ⅰ、Ⅱ、Ⅲ三个组。
第Ⅰ公差组:F′i、F″i、Fp、Fpk、Fr、ΔFw、Fw。
Ⅰ组中的精度指标是以齿轮一转为周期的误差;主要影响传递运动的准确性。
第Ⅱ公差组:f′i、f″i、fpt、ff、fpb。
Ⅱ组中的精度指标是反映在齿轮一周内,多次周期地重复出现的误差;主要影响传动的平衡性、噪声和振动。
第Ⅲ公差组:Fβ;齿轮传动:fa。
Ⅲ组中的精度指标是反映齿向线的误差;主要影响轮齿受载后载荷分布的均匀性。
根据使用要求的不同,允许各公差组选用不同的精度等级;但在同一公差组内,各项公差与极限偏差应保持相同的精度等级。(上述的公差与极限偏差符号意义可见参考文献[2]第14篇,5.齿轮齿厚的测量计算)。
上述的这些规定,对于微型齿轮(m<1.0mm)和普通齿轮(m≥1.0mm)都是相同和适用的。但是,两种齿轮的侧隙规定是不相同的。现在简述如下:
(1)微型齿轮的侧隙
ⅰ)标准对微型齿轮传动的侧隙只规定最小圆周侧隙J·tmin,它与精度无关;
ⅱ)圆周侧隙种类分五种,按最小圆周侧隙J·tmin值从小到大的顺序,用小写英文字母:h、g、f、e、d表示;h为零(参见图2-1)。

图2-1 微型齿轮的圆周侧隙种类Fig.2-1 The circular running clearance kinds of the micro gears
ⅲ)评定微型齿轮传动侧隙的指标是:
ΔE″a(双啮中心距偏差)、ΔEM(量柱测量距偏差)、ΔEw(公法线平均长度偏差)和ΔEs(齿厚偏差)。
ⅳ)有特殊要求时,允许自行规定侧隙要求。
ⅴ)微型齿轮副五种最小侧隙的数值可见表3-1。

表3-1 微型齿轮副的最小侧隙Jtmin Table3-1 Minimum running clearance Jtminof the microgear pair
(2)普通齿轮的侧隙
对于普通齿轮,其齿轮副的侧隙要求,应根据工作条件用最大极限侧隙nmax(或tmax)与最小极限侧隙nmin(或tmin)来规定。其齿厚极限偏差共分14种,用大写英文字母:C、D、E、F、G、H、J、K、L、M、N、P、R和S表示,各代号的偏差数值为齿距极限偏差fpt的倍数;参见图2-2。

图2-2 齿厚(或公法线长度)极限偏差Fig.2-2 Tooth thickness(or common normal length)limit deviation
4 齿轮的公法线平均长度极限偏差
(1)微型齿轮的公法线平均长度根限偏差Ew
微型齿轮的公法线平均长度极限偏差Ew应按照其精度等级、分度圆直径d、法向模数mn和侧隙种类(h、g、f、e、d);由侧隙指标的极限偏差Ew的表格中查得(4~9级精度等级的Ew值可见参考文献[1]第10篇,第2章,3.5)。例如,7级精度侧隙指标极限偏差Ew和EM可参见表4-1。
(2)普通齿轮的公法线平均长度极限偏差Ew
普通齿轮的公法线平均长度极限偏差Ew应按照其Ⅱ组精度等级、分度圆直径d、法向模数mn和齿厚极限偏差代号:K—L、L—M、N—K、H—J等,由公法线平均长度极限偏差Ew参考值表中查得。(5~10级精度等级的Ew值可见参考文献[1]第14篇,第1章,6.4)。例如,7级精度公法线平均长度极限偏差Ew参考值可参见表4-2。(表中Ews为上偏差;Ewi为下偏差。)

表4-1 7级精度侧隙指标的极限偏差Ew、EM (μm)Table4-1 The accuracy running clearance exponential limit deviation Ew、EM

表4-2 7级精度公法线平均长度极限偏差Ew参考值 (μm)Table4-2 7th accurocy common normal average length limit deviation Ewreference value
5 量柱直径dp和量柱测量距M
(1)微型齿轮的量柱直径dp
微型齿轮的量柱直径dp值应按其模数m的大小,由如下列出的表5-1查得。

表5-1 微型齿轮的量柱直径dp(mm)Table5-1 The micro gear measuring cylinder diameter (mm)
微型齿轮的量柱测量距M可按下式计算:

量柱中心所在圆压力角αM为

式中列有±和∓符号的,上面的符号用于外齿轮,下面的符号用于内齿轮。
微型齿轮的量柱测量距M根限偏差EM应按照其精度等级、分度圆直径d、法向模数mn和侧隙种类(h、g、f、e、d);由侧隙指标的极限偏差EM的表格中查得(4~9级精度等级的EM值可见参考文献[1]第10篇,第2章,3.5)。例如,7级精度的量柱测量距M极限偏差EM仍可参见表4-1。
(2)普通齿轮的量柱直径dp
普通齿轮的量柱直径dp,一般可按如下公式计算:

式中 m——齿轮模数,mm。
其量柱测量距M 仍可按公式(5-1)~(5-3)进行计算。普通齿轮的量柱测量距M极限偏差EM仍可按其精度等级、分度圆直径d、法向模数mn和齿厚极限偏差代号:K—L、L—M、H—K、H—J等,由公法线平均长度极限偏差EW参考值表中查得。对于内齿轮,一般应该将EW值变换成EM值:先将EW值的符号变成为正值;再按其数值的大小取值,较大的EM为其上偏差EMS,较小的EM为其下偏差EMi;即可得EMS=-EWi和EMi=-EWS。例如,内齿轮的分度圆直径d=200 mm,法向模数mn=2 mm,代号H—K;其7级精度量距M极限偏差EM,可由表4-2查得:
其上偏差EMS=-EWi=-(-192)=192μm;
其下偏差EMi=-EWS=-(-128)=128μm。
6 中心距极限偏差fa
(1)微型齿轮副的中心距极限偏差fa
微型齿轮副的中心距极限偏差±fa值应按齿轮副的精度等级和中心距a,由表6-1可查得其中心距极限偏差±fa值。

表6-1 微型齿轮副的中心距极限偏差±fa(μm)Table6-1 Micro gear pair center distarce limit deviation
(2)普通齿轮副的中心距极限偏差fa
普通齿轮副的中心距极限偏差±fa值应按齿轮副的精度等级和中心距a,由表6-2可查得其中心距极限偏差±fa值。

表6-2 普通齿轮副的中心距极限偏差±fa(μm)Table6-2 The general gear pair center distance limit deviation
总之,微型齿轮(模数m<1.0mm)与普通齿轮(模数m>1.0mm)在上述的几个方面是完全不相同的。在设计微型行星齿轮传动时,每个设计人员都必须要做到心中有数,不要将它们混淆起来。要能正确地理解和掌握两种齿轮在上述这些问题上的差别;这样才能有效地帮助你顺利地进行微型行星齿轮传动的设计计算工作。
[1] 齿轮手册编委会编,齿轮手册.上册.第2版,北京:机械工业出版社,2002.
[2] 成大先主编.机械设计手册.第3卷.第4版.北京:化学工业出版社,2002.
[3] 饶振纲.行星齿轮传动设计.北京:化学工业出版社,2003.
[4] 饶振纲.微型行星齿轮传动的设计研究.传动技术,2003,(2).
[5] 饶振纲.微型行星齿轮传动设计.北京:国防工业出版社,2012.