无框架立体定向机器人引导颈椎弓根螺钉植入的实验研究
2012-12-26王亚明张剑宁田增民
王亚明,张剑宁,田增民
无框架立体定向机器人引导颈椎弓根螺钉植入的实验研究
王亚明,张剑宁,田增民
目的 探讨基于虚拟现实可视化技术的无框架立体定向机器人(CRAS-2型)引导颈椎弓根螺钉植入的可行性。方法 3例成人颅-颈椎标本,以不同单一椎体作为独立目标分别进行1 mm的薄层扫描,不同的椎体图像序列分组在手术规划工作站进行三维重建。然后对标本的颅颈和上位颈椎切开暴露,以完全暴露同一椎体表面突出的、细小的、唯一的(CT上能清晰显示的)骨性标志为准;在目标椎体的薄层CT图像上,选择突出的、容易在标本上识别的唯一性骨性标志作为空间位置注册点,用5个自由度的CRAS-2型无框架立体定向机械臂进行靶点的注册。将目标椎弓根和侧块作为一个容积块对待,在每一个断层平面上对其进行轮廓的逐层标记。在计算机软件的辅助下进行椎弓根的三维容积重建,确定钉头预达点为靶点后,将可能的路径显示在重建的三维模型上,并在容积块内调整选择合适的路径。利用机械臂对骨性注册点在手术空间和图像空间的测量结果,计算机辅助直接将手术空间中实物结构坐标映射变换到图像空间中去;在手术空间中移动机械臂末端的手术导引探针;当手术导引针图像的轴向与预先设计的轨迹重合时锁定机械臂;在机械臂末端的操作把持平台上,严格按照导引方向细钻钻孔后,插入导向钢针,最后CT复查验证导向植入螺钉的准确性。结果 无框架立体定向机器人辅助椎弓根螺钉植入25枚(部分标本因为下颈椎缺失,未行椎弓根钢钉植入),钢钉完全与规划路径吻合,准确率达到100%。结论 无框架立体定向机器人引导的颈椎弓根螺钉植入具有精确度高、操作简便、图像引导直观清晰、经济实用等特点,有十分广阔的应用前景。
立体定向;螺钉植入;颈椎椎弓根;机器人
颈椎弓根螺钉在框架立体定向三维可视化图像引导下的个体化植入,虽然达到了让人欢欣鼓舞的准确性。但临床应用过程繁琐仍旧存在实际困难,如:术前将颈椎固定成统一刚体后定位扫描,在手术麻醉过程中增加了气管插管的难度(虽然能够通过鼻插管规避此问题);此外,颅-颈-肩固定一体化后术中牵引复位困难。虽然上述问题都能找到一定变通方式来解决[1-2],但为简化临床操作,我们在前期实验基础上,探讨无框架立体定向机器人(CRAS-2型)在引导颈椎弓根螺钉植入的可行性。
1 材料和方法
1.1 标本材料 10%福尔马林充分固定的汉族成人颅-颈椎标本3例,标本包括颅枕部和颈椎C1~C6或C7的椎体,保留完整的脊柱三柱结构和肌肉、皮肤。3例标本由北京三博脑科医院神经外科解剖实验室提供,解剖实验应用均书面报告医院伦理委员会,并经过伦理委员会批准备案。
1.2 方法
1.2.1 颈椎标本的空间位置的扫描定位 头颈标本不需要刻意的固定,仅需要像常规颅颈椎CT扫描。GE-lightspeed型16排螺旋CT(GE通用电气公司)以不同单一椎体作为一个目标进行1 mm的薄层扫描,单个椎体所有结构要扫描完整(C1~C7分别扫描),不同的椎体图像序列分开通过网络传回手术规划工作站进行三维重建。
1.2.2 颈椎后侧方的暴露 对扫描后的头颈标本按照俯卧体位以头架固定,枕下后正中开颅,严格按照中线进入,贴近椎板骨面逐层对颅颈交界区和上位颈椎区相关肌肉进行彻底分离暴露,剔净椎板表面覆着的肌肉,以免影响椎体表面骨性标志的注册。向外侧暴露要足够充分,除了暴露中线的棘突、双侧上下关节突外,有时尚需要暴露双侧横突结节,总之以尽可能多的暴露同一椎体表面突出的、细小的、唯一的(CT上能清楚显示的)骨性标志为准。以枢椎为例,寻找可以与图像上标志相对应的明显骨性标志,选择的4点不能在一个平面(图1)。

图1 后正中切开后外侧暴露颈椎侧块等结构
1.2.3 目标椎体表面细小骨性标志的注册 在目标椎体的薄层CT扫描图像上,选择突出的、容易在标本上识别的唯一性骨性标志作为空间位置注册点,注册点的选择需要选择在同一个椎体上的骨性结构,而且注册点不能位于同一平面,要相互交错,形成一定空间构型。4个不在同一个平面上的标记点就足够完成空间注册(图2)。然后在标本同一椎体上找到相对应的点,用5个自由度的CRAS-2型无框架立体定向机器人机械臂(天津华志计算机有限公司生产,精密度范围±1 mm)进行靶点的注册,要求系统误差在1 mm以下。
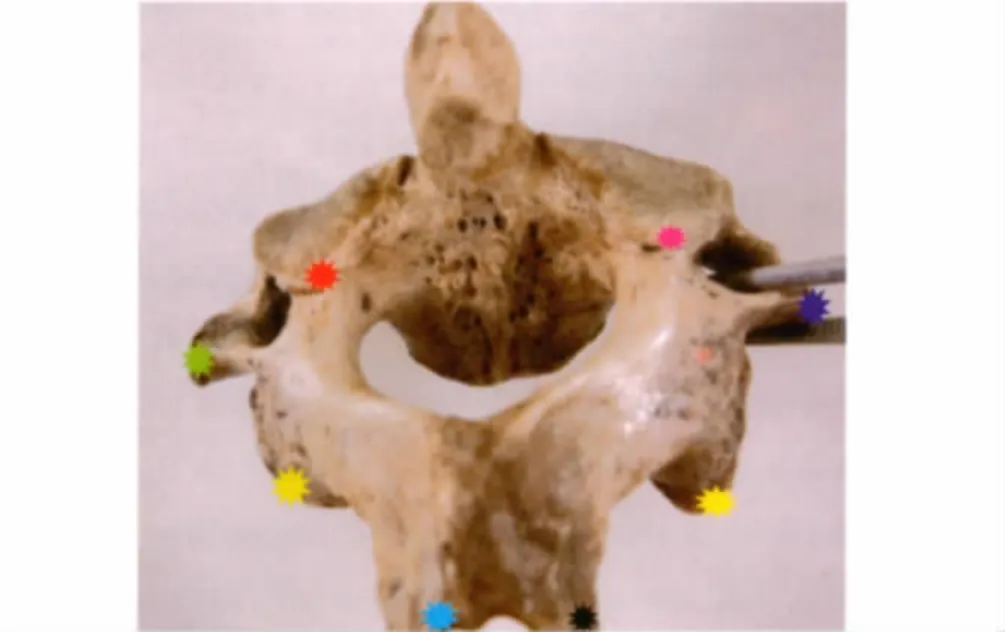
图2 枢椎骨标本显示的在CT图像上容易寻找辨认的相对应的注册点
1.2.4 三维可视化手术路径的规划 首先在图像空间进行4个标记点的坐标测量和校准后,将目标椎弓根和侧块作为一个容积块对待,在每一个断层平面上对其进行轮廓的逐层标记,在椎弓根的勾画中严格避开椎动脉和脊髓,绝对以骨性成分为勾画对象。在计算机软件的辅助下进行椎弓根的三维容积重建,确定钉头预达点为靶点后,将可能的路径显示在重建的三维模型上,并在容积块内调整选择合适的路径(图3、4)。
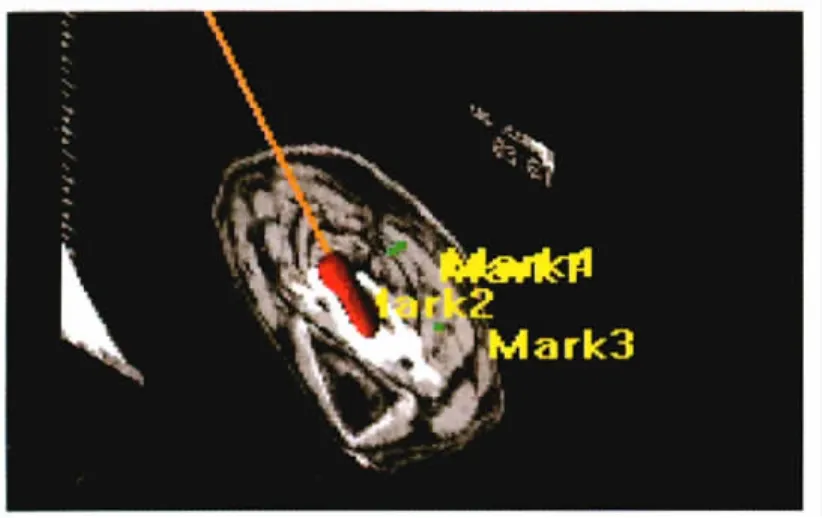
图3 椎弓根容积块的三维重建、椎弓根断层图像的叠加融合以及椎弓根植入的图像导引
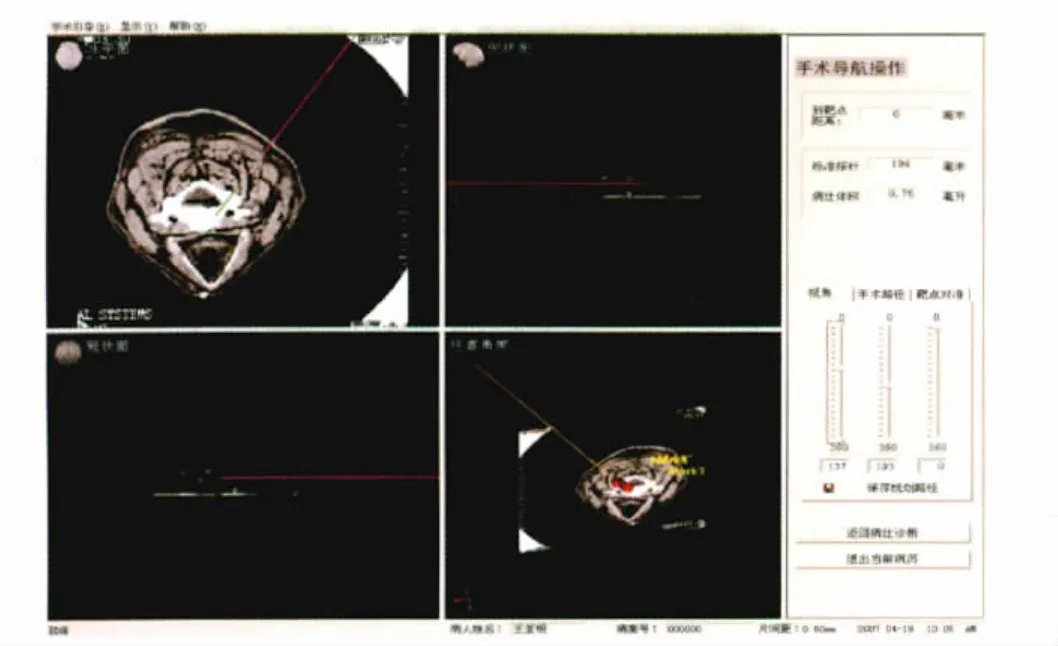
图4 椎弓根螺钉植入路径规划导航全景图
1.2.5 机械臂导引的椎弓根螺钉植入 利用机械臂对骨性注册点在手术空间和图像空间的测量结果,计算机辅助软件直接将手术空间中实物结构坐标映射变换到图像空间中去;在手术空间中移动机械臂末端的手术导引探针,导引软件会把探针的位置实时地显示在图像空间中;当手术导引针图像的轴向与预先设计的轨迹重合时锁定机械臂;在机械臂末端的操作把持平台上,严格按照导引方向细钻钻孔后,插入导向钢针(图5),CT复查验证导向的准确性。
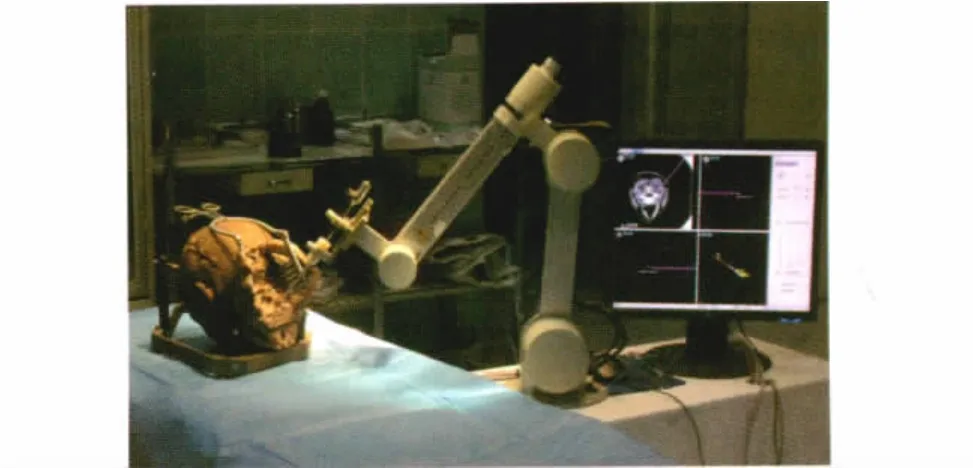
图5 机器人辅助引导椎弓根的定位植入
2 结果
在3例标本中共进行无框架立体定向机器人辅助椎弓根螺钉植入25枚(部分标本因为下颈椎缺失,未行椎弓根钢钉植入)。植入后CT和X线复查评价准确性发现:25个椎弓根置钉中,钢丝完全与规划路径吻合,准确率达到100%。在实时图像导向中,图像空间严格设计准确的椎弓根路径,即使不能在大体标本上确定椎弓根在侧块上投影来明确合适的“进钉点”,机器人导引选择的“进钉点”也和理论上无神经血管的解剖安全区(外上象限)完全吻合(图6、7),而且有时下位颈椎标本生理曲度的异常扭曲旋转,使常规的上倾、内倾角度测量不可能完成时,导引进钉方向也十分精确(图8)。
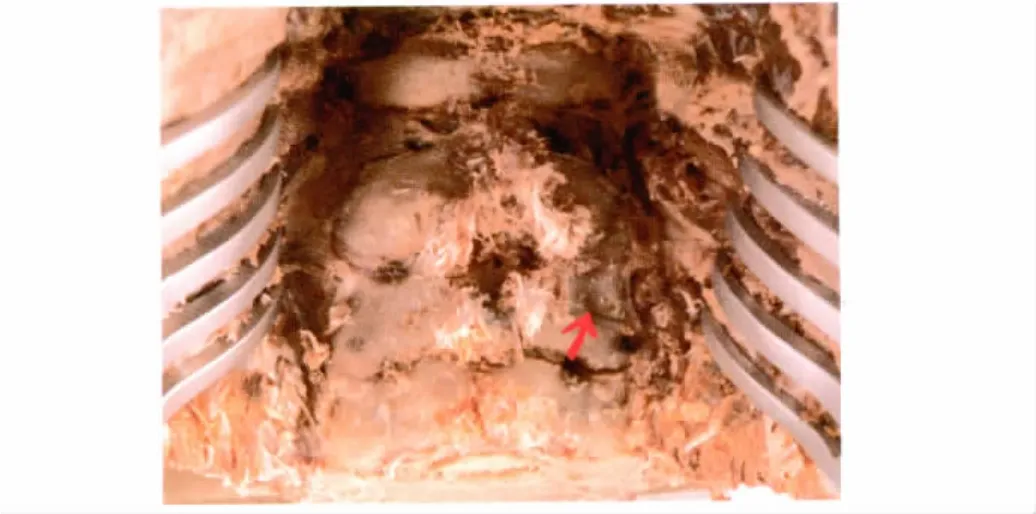
图6 红色箭头指引的定向植入椎弓根螺钉的“进钉点”正好和解剖理论上的“安全区”完全吻合,角度也符合常规解剖测量

图7 机器人机械臂把持的椎弓根螺钉植入实景
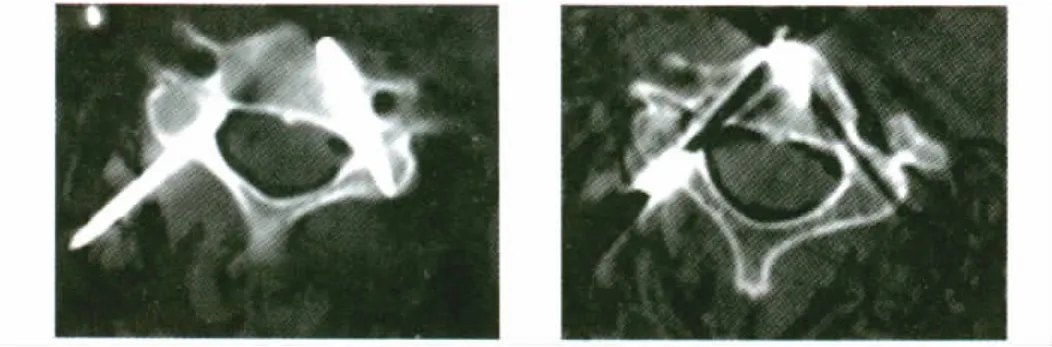
图8 机器人把持操作平台辅助下引导钻孔螺钉植入和复查螺钉的准确性,精确地避开椎动脉和脊髓
3 讨论
真实空间的几何学描述、定位都需要建立局部的坐标系统,而在比较两个局部的坐标系时,必需建立它们之间的映射关系,即寻求一个转换矩阵,这个问题就称为定位问题。定位问题指将物理空间或手术空间中某个感兴趣点映射到计算机图像空间中去,描述它们之间的映射关系。
在脊椎固定螺钉植入的过程中,手术切开暴露的椎板、侧块等骨性结构掩盖其下走行的椎弓根、椎动脉、神经根和脊髓,如何在不破坏保持椎体稳定骨性结构的基础上,用计算机图像空间坐标实时描述“不可见结构”的物理空间位置坐标,成为定位问题的关键[1-3]。
要解决这个问题,需要在图像和物理空间里定义至少3个以上对应点,称为参考基准点。根据几个参考基准点,就可以导出2个空间之间的转换矩阵,也就确定映射定位关系。但正确映射关系建立的基石是:参考点必须是“统一刚性结构”中的各点,参考点之间位置恒定,没有位移。
在立体定向神经外科手术定位中,基准点的确立通常有3种方法:①传统立体定位框架(steel frame):将金属框架牢牢地固定患者的头部,使头部和框架形成统一刚体,在CT图像上选择框架上能显影的参考点,那么图像中的病灶的空间位置就可以通过框架坐标系来描述确定,虽然精度较高,但属于损伤性定位。②体外参考标记法(extrinsic fiducial markers):利用连接到人体表面能在图像上显影的小物体作为标记点,通常将标记点粘在头皮表面或植入颅骨。虽然该法使患者和术者摆脱笨重框架的束缚,但主要缺点在于图像扫描和手术时皮肤位置的变化(即目标和参考点在空间位置上未形成固定不变的刚体结构),皮肤活动会导致标记物的位移或标记点和靶目标空间位置的变化,影响定位的精度。③本体参考标记法(intrinsic fiducial markers):以图像可以显示的人体解剖结构(如鼻尖、鼻根、耳屏等)作为标记。这些解剖标记必需具备3个条件:骨性结构或与之相联、没有空间位移(刚体内);在CT、MRI图像能显影;具有可作为标记点的尖端形状。但临床实践中,寻找在2个空间内(图像和物理)相对应的满足3个条件的解剖注册点十分困难。
在对“隐藏的”椎弓根的空间定位实践中,恰好容易选择完全满足“本体参考标记法”要求的参考基准点,也就形成本实验的理论基础。即对于单个骨性椎体来说,因为其组成的所有骨性结构(如椎弓根、棘突、横突、上下关节突等)在空间位置相对恒定,因此在对椎体薄层扫描定位前提下,可以把每个椎体作为“单个的统一刚性结构”来对待。在保持整个“刚性”椎体空间位置恒定情况下,通过对椎体背面可暴露骨性结构(棘突、横突、上下关节突尖等)的识别以及与CT图像上相应位点的注册照合,物理空间和图像空间映射关系的矩阵转换,是能够对同一椎体腹侧所有不能暴露组织结构(如椎弓根、椎动脉、脊髓)的位置和走行进行空间描述的,并且能在相应的影像定位引导装置(如机械臂)的指引下完成空间定位[5-6]。
但是对参考基准点不能或尽量避免选择相邻椎体表面的“尖形”骨性,因为相邻椎体之间的位移使其不能作为“统一刚体”,会对定位产生误差。冯海龙等[2]在对胸腰段正常椎体计算机导航操作中发现,因为胸腰椎相邻椎体间活动度不大,相邻椎体定位精度可达0.2~0.3 mm,跨阶段椎体定位精度为0.5~0.7 mm,第3个椎体精度1.2~1.8 mm;但在颈椎定位中,因其活动度增大并存在旋转移位,误差就明显增加,必须结合X线透视定位。
在以上理论基础上,本实验中将每一个目标椎体作为一个“刚体单元”,进行薄层CT扫描,明确物理空间中“可见”结构(棘突、横突、关节突尖)和“不可见”结构(遮挡的椎动脉、脊髓、椎弓根)在图像空间内的坐标构型关系,并通过注册点的照合,将2个对应空间的映射关系融合起来。最后在图像空间的三维坐标体系中设计出针对“隐藏”靶目标的精确靶点位置和穿刺轨迹,再通过智能机械臂将图像空间中模拟的手术路径映射成物理空间中的精确穿刺方向,为术者提供准确导航和操作平台[7-9]。本组按照上述方法完成的25个椎弓根螺钉植入,准确率达到100%,没有椎弓根的突破和脊髓、椎动脉的损伤;而且在图像空间内根据椎弓根“三维容积块”内调整选择的“合理”置钉路径,即使不通过测量数据明确椎弓根在侧块上投影来选择合适的“进钉点”,机械臂导引选择的“进钉点”也和理论上无神经血管的解剖安全区(外上象限)完全吻合,而且即使有时下位颈椎标本生理曲度的异常扭曲旋转,使常规的上倾、内倾角度测量不可能完成时,导引进钉方向也是出奇的精确。
海军总医院与北京航天航空大学联合开发的机器人辅助外科手术系统(computer and robot assisted surgery,CRAS),主要结构包括智能机械臂、影像引导装置和三维定位软件等3个部分,其三维构图软件、稳定的把持装置也是精确制导的保证[1,3-4]。
规划软件由图像采集、二维图像预处理、三维头部模型的重建、模型的三维可视化交互式操作、手术穿刺路径仿真等部分组成。与以往应用软件不同,该软件可进行交互式头颈断层图像输入和三维重建,能建立颈椎、目标靶区及周围重要结构的空间几何描述,并对构建的不同容积块进行的融合、分解;三维立体、多角度动态显示,能显示椎弓根峡部骨性结构下方、横突管内椎动脉的走行位置、个体变异等。
机械臂末端稳固的导向把持平台为手术路径精确提供了保证。机械臂末端的探针作为虚拟手术引导器械,将映射到计算机三维模型中。软件系统将读取位置信息,并在模型上显示出1根与实际观察棒位置相一致的虚拟探针,通过移动机械臂来调整图像中的探针,使之以不同的方位和角度达到图像空间里设计的手术插入轨迹。微电机固定的机械臂即可保持稳定的姿态,将探针等器械指向靶点,实际定位精度1.5 mm。
海军总医院开发的CRAS与目前临床应用的计算机辅助椎弓根置钉导航系统相同之处是都借助图像的引导,但在机械设备原理、导向模式和效果上都存在本质的不同。
计算机三维导航的原理是把目标椎体通过术前薄层CT重建,在与目标椎体相隔数个节段的其他椎体(非目标椎体)棘突末端上固定带红外光反射球定位参考架,导航系统以参考架作为基点坐标原点,采用红外线位置追踪仪实时显示注册手术器械在虚拟影像三维空间的位置,引导按照设计的路径置钉。因为,目标椎体和参考架固定椎体不是统一的刚体,其之间的位移必定影响定位准确性,产生“靶点路径的飘移”;其次在开路锥扩椎弓根钉道时,参考架随着操作在导航坐标系中的摆动,会使虚拟的椎体和操作器械路径在图像空间中晃动,虚拟探针的位置不能真实地反映手术器械实际位置,产生较大误差。而在CRAS机械臂系统,其两个映射空间位置的照合、注册以及最后的导向,均不需要通过“第三者”——带红外线反射小球的定位架来介导,也不需要通过红外线接受装置来实时反映操作器械位置,其标记点的注册和导向空间反映都是通过机械臂内的位置光电编码器采集卡“同轴”完成,这就避免设置“参考架”和“红外线接受装置”可能导致的“靶点偏移”。
通过无框架立体定向机器人在引导颈椎弓根螺钉植入的实验中的成功应用,我们认为该技术在椎弓根螺钉植入的临床实践中具有精确度高、操作简便,图像引导直观清晰、经济使用等特点,有十分广阔的应用前景。
[1]田增民,王田苗.数字化图像导引与无框架定位脑手术[J].中国医学影像技术,2003,19(S1):158-159.
[2]冯海龙,陈隆益,谭海斌,等.计算机导航辅助椎弓根螺钉固定的临床研究[J].中华神经外科杂志,2007,23(5):332-335.
[3]林良明.机器人辅助微创外科手术的发展[J].中国医疗器械信息,2003,9(2):16-18
[4]邵兵,孙立宁,杜志江.机器人辅助微创外科手术系统的研究现状及关键技术分析[J].黑龙江大学自然科学学报,2005,22(1):56-60.
[5]Kitagawa M,Dokko D,Okamura AM,et al.Effect of sensory substitution on suture manipulation forces for surgical teleoperation[J].Stud Health Technol Inform,2004,98:157-163.
[6]Zimmermann M,Krishnan R,Raabe A,et al.Robot-assisted navigated neuroendoscopy[J].Neurosurgery,2002,51(6):1446-1452.
[7]Marescaux J,Leroy J,Rubino F,et al.Transcontinental robot-assisted remote telesurgery:feasibility and potential applications[J].Ann Surg,2002,235(4):487-492.
[8]Gonchar L,Engel D,Raczkowsky J,et al.Virtual simulation system for collision avoidance for medical robot[J].Stud Health Technol Inform,2001,81:168-170.
[9]Kim HL,Schulam P.The PAKY,HERMES,AESOP,ZEUS,and da Vinci robotic systems[J].Urol Clin North Am,2004,31(4):659-669.
Experimental study of the computer and robot assisted surgery in cervical pediculus arcus vertebrae screw implantation
WANG Ya-ming,ZHANG Jian-ning,TIAN Zeng-min
(Department of Neurosurgery,Navy General Hospital,Beijing 100048,China)
ObjectiveTo explore the feasibility of computer and robot assisted surgery in guiding cervical pediculus arcus vertebrae screw implantation.MethodsThree adult cadaver were used and 1 mm thick CT scan was performed to reconstruct three dimension images of individual vertebral bodies by the surgery planning work station.Then the cranio-vertebral junction structures and upper vertebral bodies were surgically exposed with the bony structures that could be revealed by the CT scan as the only register target being identified.The targets were registered by the CRAS-2 frameless stereotactic arms with 5 free direction ranges.The vertebral arch was 3D volume reconstructed by tracing the target vertebral arch and lateral mass as single volume block.After the reconstruction,the target was located as the arrival spot of the implanted screw point,and the alternative approaches were manifested in the reconstructed 3D model,and then adjustments were performed in the volume block.According to the registration and measurement by the mechanic arm,the real objects during the surgery were mapped to the reconstructed images.During the surgery,the mechanic arm was guided to the planned projection in the images and then the directing needle was introduced under the guidance.CT scan was performed the assure the accuracy the screw imola ntation.ResultsTwenty-five screws were implanted under the guidance of the frameless stereotactic robot with 100%accuracy matching to the planned surgical approach.Conclusion The cervical screw implantation guided by the frameless stereotactic robot was accurate,easy and plain to handle,economic,and thus with a promising application potential.
Stereotactic;Screw implantation;Cervical pediculus;Robot
R681.5
A
2095-3097(2012)01-0001-05
10.3969/j.issn.2095-3097.2012.01.001
首都医学发展科研基金(2007-3167)
100048北京,海军总医院神经外科(王亚明,张剑宁,田增民)
2012-05-02 本文编辑:徐海琴)
