基于虚拟体的身管多体动力学模型研究
2012-12-25陈世业王良明
陈世业,王良明,史 伟
(1.南京理工大学 能源与动力工程学院,南京210094;2.中国兵器工业基团051基地,陕西 华阴714200)
火炮进行射击时,系统内构件间的刚性运动与弹性变形相互耦合,使身管产生复杂的弹性振动并形成炮口扰动,增大了射角的散布,严重影响火炮的射击精度,因而建立相对准确高效的身管多体动力学模型,使其能较真实地反映复杂受力条件下炮口的动态响应特性,对火炮系统的动力学分析具有重要的指导意义.
从目前的研究状况来看,柔性身管在系统模型中的描述主要采用模态法[1]、有限段法[2,3]、有限元法[4]等.在火炮的实际发射过程中,弹丸与炮膛内壁的接触力以及燃气作用力对身管的弹性振动产生的影响不容忽略,如何在反映身管弹性的前提下充分考虑弹丸的实时接触力等外加载荷的作用,是身管建模过程中存在的一个重要问题.同时,由于弹丸和身管的接触区域在随时变化,即柔性体的边界条件不断改变,要获得结构的动应力、动应变等信息,需通过完全有限元柔性体和多体动力学的耦合计算来实现,这大大降低了身管系统的求解效率.
针对上述问题,本文将虚拟体引入身管多体系统,提出了一种柔性身管的建模方法,推导了含虚拟体项的身管拉格朗日动力学方程,并结合算例验证了方法的有效性.
1 系统描述
在此先引出本文中虚拟体的概念,即假想的无质量、无转动惯量的刚性体.基于虚拟体构建的身管模型如图1所示,模型中采用模态法描述身管的弹性变形,即将身管结构刚度通过预先有限元计算得到的模态来表示,通过模态振型的叠加来获得其动态应力和应变.模型具体描述如下:虚拟体的几何模型对应于身管的真实结构,由有限个虚拟体组成了身管的实体外形,虚拟体两端以球铰的形式联接在经过模态解析的身管柔性单元上(图1中为身管对应的变截面有限元梁单元),相邻虚拟体间以刚性铰约束限制其绕身管轴线方向的相对转动,其中尾部段与炮尾铰接.
有限个虚拟体的引入,使弹丸在由虚拟体组成的模拟身管中运动,从而把弹丸与柔性身管的接触转化为弹丸与虚拟体间的接触碰撞,避免了由于接触区域的变化而导致柔性体边界条件改变这一问题;同时,弹炮间的相互作用力将通过虚拟体传递到柔性身管单元上,并反馈给弹丸运动,而由于单元中包含了身管真实结构所对应的模态信息,故能精确描述其动力学响应特性.

图1 含虚拟体的身管几何模型
2 虚拟体和相邻柔性体间的运动学约束方程
取任意虚拟体j和其长度范围的柔性体单元为第i个身管特征段,如图2所示,OXYZ为系统的惯性参考系,OjXjYjZj、OmXmYmZm和OnXnYnZn分别为虚拟体j和柔性体单元m、n的连体坐标系,原点位于质心处.在多体动力学分析中,刚性铰约束和基于有限元的柔性铰约束已经很完善,在此只列出虚拟体和其铰接的柔性体间的约束方程.虚拟体j的坐标系原点可表示为

式中,A为柔性体参考坐标系的姿态矩阵和分别为刚体上一点相对刚体参考坐标系的未变形矢量和变形矢量,节点位置的变形矢量可以表示为振型的线性组合:


虚拟体j的姿态方程为式中,f代表柔性体,Am,j为未变形状态柔性体m和虚拟体j间的姿态矩阵为由转动变形引起的相对姿态矩阵,且为旋转变形矢量εm的函数,εm的表达式为

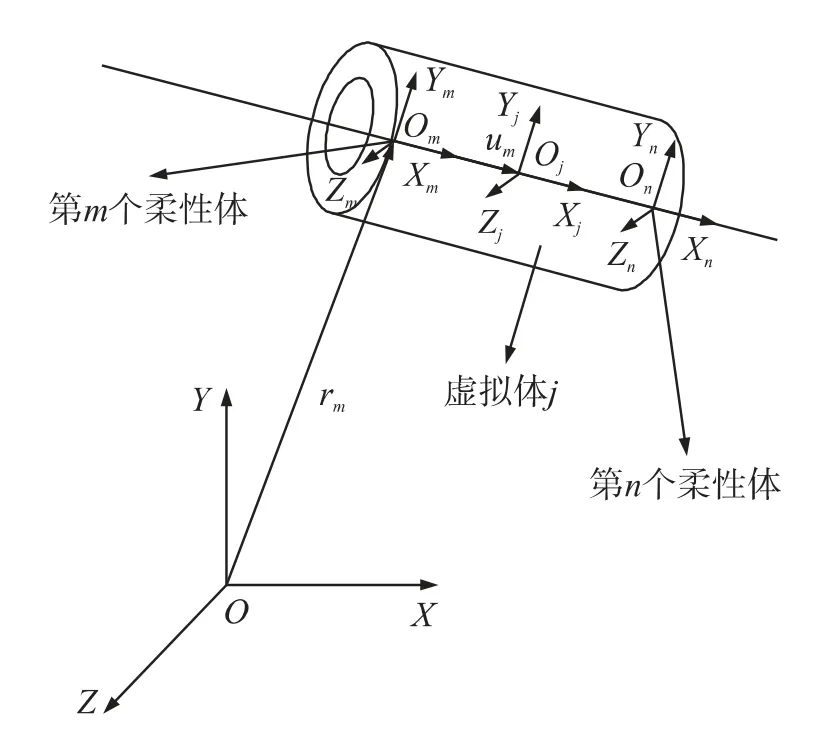
图2 身管特征段几何描述
联立式(1)、式(3),可以得到柔性体坐标系和虚拟体坐标系间的运动约束:
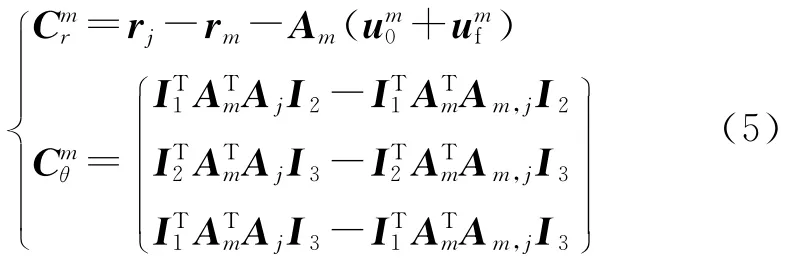
式中,(I1I2I3)为3×3的单位矩阵和分别为位置约束和角约束.对上式进行变形:

3 身管多体动力学方程
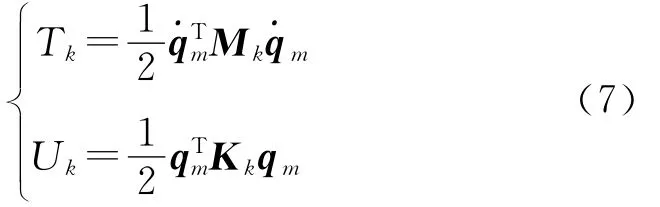
在第i个身管特征段中,取虚拟体j和柔性体m为新的单元体k,其动能Tk和弹性势能Uk的表达式为
单元体的质量矩阵Mk为

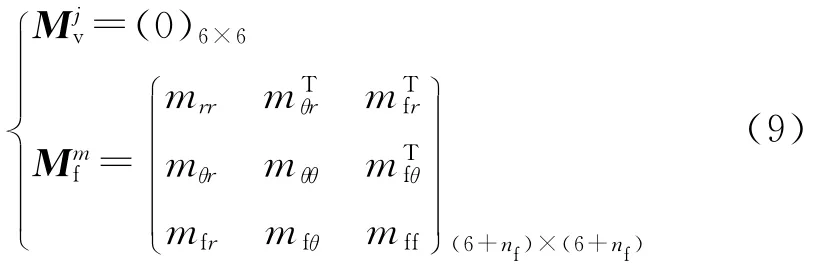
式中,nf为模态坐标的个数.
由于虚拟体的运动不会产生应变能,单元体的刚度矩阵Kk在柔性体m的节点坐标系中产生.用拉格朗日乘子法建立单元体k的运动微分方程为

式中,λ为拉格朗日乘子;广义力Fk包括单元弹性变形引起的广义力和外加载荷引起的广义力两部分,其中包括了弹炮接触作用引起的广义力.将单元体的动能表达式代入微分方程可以得到:


当弹丸与虚拟体j发生接触碰撞,两者间的接触力FR转化为柔性体单元m、n中的节点力FR,m、FR,n,如图3所示.

图3 弹丸与身管特征段的几何模型
在单元体k中,由接触引起的广义力FkR为

同时,限制相邻虚拟体间绕身管轴线方向的相对转动,即在机构的约束方程中添加虚拟体间的刚性铰约束
综上,将组成身管多体系统的n个构件产生的运动方程与系统约束方程C(q,t)联立,得到系统动力学方程的统一矩阵形式:

由上式可知,身管系统的质量矩阵M和约束矩阵Cq中均含有虚拟体项,其中Cq由三部分组成,包括柔性体与虚拟体间的约束、柔性体间的约束和相邻虚拟体间的约束.当弹丸与虚拟体发生接触碰撞时,两者的相互作用力通过广义力Fe的形式传递到系统的动力学方程中,最终对身管的弹性振动产生影响并反馈给弹丸运动.
4 算例分析
4.1 基本仿真条件
以某型履带式自行火炮为例,引入身管多体动力学模型,如图1所示.考虑剪切力和转动惯量对身管弯曲变形产生的影响,基于Timoshenko梁理论[6]建立身管的变截面有限元梁单元,采用Block Lanczos数值法,对模态实施求解,由于身管的高阶模态对系统振动影响较小[7],在实际计算过程中可取有限个低阶模态进行分析,本文取其前10阶固有振动模态,如表1所示.模型中由11个虚拟体组成模拟身管,附加了22个柔性铰和11个刚性铰约束,含模态信息的柔性身管梁单元在炮闩前端面中心处与炮尾固连,其中身管阻尼设为刚度系数的0.003倍.
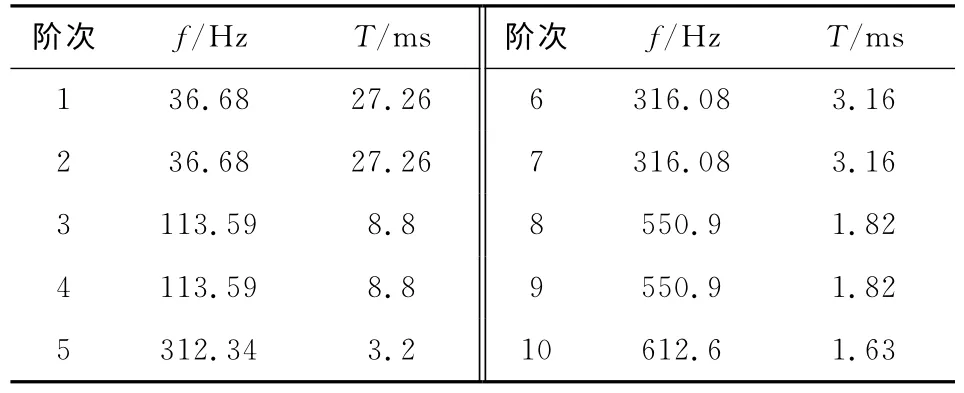
表1 某自行火炮身管前10阶模态的振动频率和振动周期
4.2 结果与分析
试验条件如下:自行火炮处于水平土壤地面上,高低射角10mil,方向射角8 mil,采用全装药底凹榴弹在常温下进行射击,系统模型采用上述边界条件进行计算分析.
火炮在t=0.05s时射击.图4、图5给出了后坐位移l和后坐速度v的对比情况,可以看出计算曲线和试验曲线基本吻合.
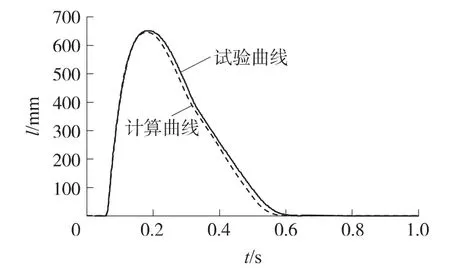
图4 炮尾后坐位移对比曲线
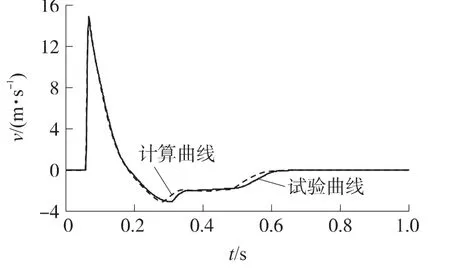
图5 炮尾后坐速度对比曲线
由图4可知,计算曲线中炮尾在0.62s复进到位,相对于测试值0.64s提前0.02s,主要是由于对身管进行有限元分析时,建立的变截面梁模型简化了身管的真实几何结构,造成质量、转动惯量和质心位置与实际值有所偏差.
炮口的动态响应取炮口点的振动角位移为研究对象,图6、图7分别给出了垂向角位移和水平方向角位移的对比结果.弹丸经过0.011s(t=0.061s)出炮口,从图中可以看出,该时刻附近计算所得的角位移分量和测试值有很好的一致性.
图6、图7中测试曲线和计算曲线分别在0.64s和0.62s时发生比较大的波动,这是由于炮尾复进到位时对应的复进速度并不为0,这是它与摇架发生碰撞所造成的.
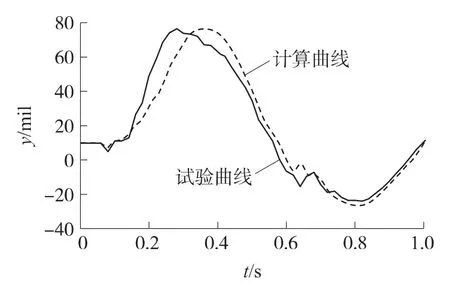
图6 炮口点垂向振动角位移对比曲线
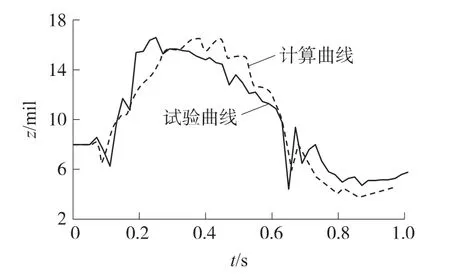
图7 炮口点水平方向振动角位移对比曲线
图8给出了弹丸速度vd的计算曲线,可知弹丸初速为706m/s,而实测弹丸初速713m/s,两者的相对误差为0.98%,可知弹丸在虚拟身管中的运动与实际情况符合较好.
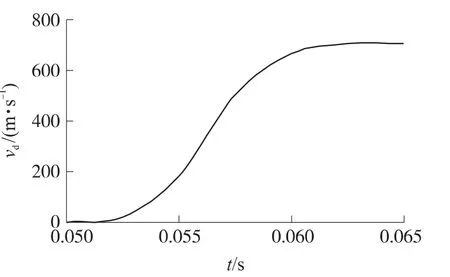
图8 弹丸速度计算曲线
5 结论
本文将提出的柔性身管建模方法应用到某履带式自行火炮的动力学模型中,通过计算结果和试验数据的对比,得到如下结论:
① 把虚拟体引入到柔性身管的建模中在理论上是可行的,可以为弹炮耦合问题的研究提供一定参考.
②采用该方法建立的身管模型,充分考虑了弹丸接触力等外加载荷的影响,并能在复杂受力条件下较为精确地描述身管的弹性振动和火炮的炮口扰动.
[1]徐达,胡俊彪,穆歌.基于刚柔耦合的坦克炮发射动力学仿真分析[J].装甲兵工程学院学报,2009,23(4):45-47,51.XU Da,HU Jun-biao,MU Ge.Simulation analysis on tank gun firing dynamics based on rigid-flexible coupling[J].Journal of Academy of Armored Force Engineering,2009,23(4):45-47,51.(in Chinese)
[2]刘雷,陈运生.身管多体动力学模型研究[J].南京理工大学学报,2005,29(3):267-269,295.LIU Lei,CHEN Yun-sheng.Multi-body dynamic model of barrel[J].Journal of Nanjing University of Science and Technolo-gy,2005,29(3):267-269,295.(in Chinese)
[3]王晓锋,姜兴渭.有限段法在高炮发射多体系统动力学分析中的应用[J].南京理工大学学报,2001,25(1):25-27.WANG Xiao-feng,JIANG Xing-wei.Application of finite segment method to dynamic analysis of antiaircraft gun launch[J].Journal of Nanjing University of Science and Technology,2001,25(1):25-27.(in Chinese)
[4]于存贵,申亮,马大为.舰炮刚柔耦合发射动力学研究[J].系统仿真学,2009,21(23):7 694-7 696.YU Cun-gui,SHEN Liang,MA Da-wei.Study on simulation for rigid-flexible coupling launch dynamics of naval gun[J].Journal of System Simulation,2009,21(23):7 694-7 696.(in Chinese)
[5]冯勇,马大为,薛畅,等.多管火箭炮刚柔耦合多体发射动力学仿真研究[J].兵工学报,2006,27(3):545-548.FENG Yong,MA Da-wei,XUE Chang,et al.Simulation studies of coupled rigid and flexible multi-body dynamics for multiple launch rocket systems[J].Acta Armamentarii,2006,27(3):545-548.(in Chinese)
[6]EISENBERGER M.Dynamic stiffness matrix for variable cross-section Timoshenko beams[J].International Journal for Numerical Methods in Biomedical Engineering,1995,11(6):507-513.
[7]余成宝.火炮系统模态测试与分析[D].南京:南京理工大学,2007.YU Cheng-bao.Modal test and analysis of artillery system[D].Nanjing:Nanjing University of Science and Technology,2007.(in Chinese)
