GPS PPK技术在船舶通航试验中的应用
2012-12-11邹进贵
邹进贵,陈 健,余 锐,宣 伟
(1.武汉大学测绘学院,湖北武汉430079;2.精密工程与工业测量国家测绘地理信息局重点实验室,湖北武汉430079)
一、引 言
GPS技术已在世界范围内得到广泛的应用,应用范围涉及航天航空、板块运动、减灾防震、大地测量、工程测量、地质勘探、交通旅游等领域。RTK技术以其实时、高效、高精度等特点在GPS动态定位方面优势明显,其技术发展亦日趋成熟,在工程测量等方面的应用相当普遍[1]。然而,由于受卫星和通讯电台的制约,有时难以发挥RTK技术的优势。随着流动站和基准站之间距离的增加,各种误差的空间相关性将迅速下降,导致观测时间的增加,甚至无法固定整周模糊度而只能获得浮点解,因此在RTK测量中流动站和基准站之间的距离一般只能在15 km 以内[2],而 PPK(post processing kinematic)技术恰好弥补了RTK技术这方面的不足。PPK技术是一种利用载波相位观测值进行事后处理的动态相对定位技术。由于是进行事后处理,因此用户无需匹配数据通讯链,也无需考虑流动站能否接收基准站播发的无线电信号等问题,观测更为方便、自由,适合于无需实时获得定位结果的应用领域。
在航道通航试验中,需要获得船舶航行的航迹、航速以及船形图来进行相关的数据分析,为航道通航规则的制定提供数据支持。船舶航行的范围一般会分布在几十千米的范围内,并且无需获得实时坐标,因此在此类实际测量工作中PPK技术相对于RTK技术优势明显。
二、GPSPPK技术测量原理
PPK技术的工作原理是利用一台进行同步观测的基准站接收机和至少一台流动站接收机,对GPS卫星进行同步观测,也就是基准站保持连续观测,初始化后的流动站迁站至下一个待定点,在迁站过程中需要保持对卫星的连续跟踪,以便将整周模糊度传递至待定点。基准站和流动站同步接收的数据在计算机中进行线性组合,形成虚拟的载波相位观测量,确定接收机之间的相对位置。最后引入基准站的已知坐标,从而获得流动站的三维坐标[3]。
PPK技术与RTK技术的主要区别在于:在基准站和流动站之间,不必像RTK那样建立实时数据传输,而是在定位观测后,对两台GPS接收机所采集的定位数据进行事后的联合处理,从而计算出流动站在对应时间上的坐标位置,其基准站和流动站之间的距离没有严格的限制。它的优点是定位精度高、作业效率高、作业半径大、投资省和易掌握,不足之处是流动站在迁站过程中必须保持对卫星的连续跟踪[4]。
三、GPSPPK技术在船舶通航试验中应用的关键
目前一些主流的接收机均具有PPK的测量模式,操作简单方便,如Trimble系列和Leica系列等,并有相应软件进行数据处理。在某些型号仪器中并没有具体对应的PPK测量模式,为了更好地提高生产效益和设备的使用效率,可以在采集数据时通过对测量参数的适当设置,对测后的数据文件进行适当的编辑和处理,也可完成PPK测量任务。本文以Leica System 1200 GPS接收机和LGO数据处理软件为例来介绍相应的PPK作业数据采集和数据后处理的流程与技巧。
(1)外业数据采集
由于System 1200 GPS接收机中没有PPK测量模式,因此在采集数据的时候,需要进行适当的参数设置。基准站和流动站接收机统一采用成静态测量模式,采样率均设置为1 s,天线高及其他的设置均按照静态测量的模式设置,基准站接收机按照严格的静态测量模式来进行测量,流动站均使用对中杆。在实际测量工作中,基准站架设在已知点上连续保持观测状态,根据作业需要和实际情况将流动站对中杆绑在测量船只的船首和船尾的中轴线上,同时记录下测量船只长宽等相关信息。船首和船尾的流动站接收机应尽可能同时开机和关机,以保证有足够的同步数据。外业数据采集完成以后,采用读取CF卡的方法导出接收机中的观测数据。
(2)数据文件的编辑和准备
在外业数据采集完成以后,需要进行关键的数据后处理工作。在进行数据处理之前,必须要对观测数据文件进行适当的编辑和处理。在LGO中将Leica接收机的原始数据格式统一转换成RINEX格式。由于流动站和基准站的文件类型均是静态观测值文件,因此需要将流动站的观测值文件加上动态信息标识。所有的流动站观测值文件均需要在头文件结束标识后加一行,并在这一行的特定位置手工加入动态信息标识“2”,如图1所示[5]。

图1 编辑流动站的RINEX文件
若是不同类型的接收机联合作业,则需要将记录的数据统一转换成RINEX格式,然后按照上述操作进行相应的数据文件编辑即可。在所有的数据准备工作完成以后,才可以利用LGO进行数据后处理工作。
(3)数据处理
在完成项目的坐标系统等参数设置后,导入准备好的数据文件。在GPS处理视图中可以看到如图2所示的观测时段信息,第1行为基准站时段信息,第2行为流动站信息。若发现异常情况,则需要检查观测值文件编辑是否正确。当待处理的数据确认无误以后才可进行后续的数据处理操作。

图2 流动站和基准站的观测时段信息
在输入基准站的控制点坐标,设置合适的处理参数以后,可以利用LGO的数据自动处理功能进行数据的自动处理,处理后的结果信息如图3所示:

图3 处理的数据结果信息
在此解算模式下能够得到每一个观测历元的解算坐标。从图3可以看出,当静态模糊度固定时,解算结果的平面精度和高程精度均可达到厘米级的水平,完全能够满足船舶通航试验的精度要求。存储静态模糊度固定的流动点解算结果,保留历元的时刻信息、坐标信息和精度信息。根据流动点的历元时刻信息和坐标信息便可进行后续的航速、航迹、船形图的绘制。
(4)通航试验成果的整理
根据船舶通航试验的成果整理要求,在Visual Studio 2010中采用C#语言编写了相应的数据后处理程序。此程序具有自动提取两台流动站同步时刻坐标信息等数据预处理功能,并且可以根据已知的时刻和坐标信息自动绘制DXF格式的航速、航迹以及船形图。数据预处理程序界面如图4所示。
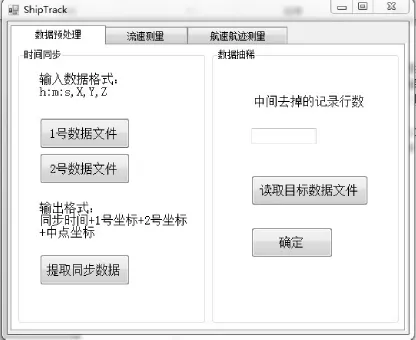
图4 数据预处理界面
航速、航迹图的绘制程序界面如图5所示。
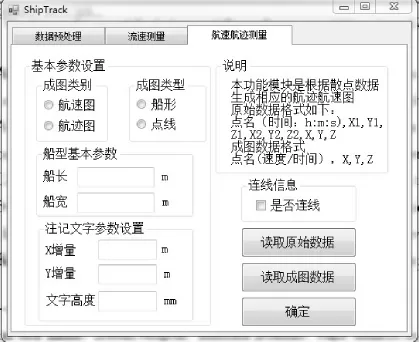
图5 航速航迹图自动绘制程序界面
四、GPSPPK技术在某船舶通航试验中的实际应用
在某实际船舶通航试验中,采用Leica System 1200 GPS接收机采集数据,利用LGO数据处理软件和编写的图形绘制程序完成了所需试验成果的整理。
试验中,数据采集和数据处理流程如下:
1)在控制点上架设好基准站之后,在需要测量的每条船的船头、船尾的中轴线上分别架设一台GPS接收机,接收机位置尽可能靠近船头或者船尾的端沿。
2)船头和船尾的接收机尽可能保证在同一时刻开机和关机。测量完成后,停止数据记录,从CF卡中导出采集的数据。
3)利用Leica LGO软件对基准站和流动站的PPK观测数据进行综合处理,获得不同历元时刻流动站GPS接收机天线处的三维坐标解。
4)利用编写的数据处理程序进一步进行相应的数据成果整理。
以一条航线为例展示数据成果的形式,如图6所示。

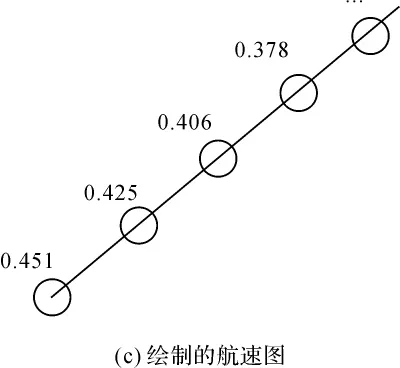
图6 数据成果
五、结束语
试验结果表明,GPS PPK技术用于船舶通航试验能够充分发挥其作业距离远、定位精度较高、操作简易方便等技术优势,完全能够满足这一类测量作业任务的要求,可以广泛推广应用。
[1]倪卫明,王志伟,王永平.GPSRTK技术和PPK技术联合作业探讨[J].物探装备,2006,16(4):303-304.
[2]李征航,黄劲松.GPS测量与数据处理(M).武汉:武汉大学出版社,2010:9-14.
[3]郭建华.GPSPPK技术在地形地籍测量中的应用[J].城市勘测,2011,6(3):88-90.
[4]畅毅,房建雪,周敏,等.PPK技术作业模式与精度分析[J].全球定位系统,2009(1):33-37.
[5]黄劲松,李英冰.GPS测量与数据处理实验教程[M].武汉:武汉大学出版社,2009:161.