有人轻小型航空遥感系统在电力工程中的应用研究
2012-12-11张济勇曹玉明孙小虎
张济勇,曹玉明,孙小虎
(华北电力设计院工程有限公司,北京100120)
一、引 言
2010年10月15日,随着我国关于低空空域管理改革指导意见获得批准,国内1000m以下低空空域将逐步对民用领域开放,这对近几年发展起来的轻小型航空遥感系统将具有巨大的推动作用。
轻小型航空遥感系统是指采用轻型机飞行平台进行航空摄影与遥感的一项测量技术,主要应用于100 km2以下区域的大比例尺测图。主要的飞行平台有有人轻型机,无人飞行器和飞艇。目前在国内商业运用的轻小型航空遥感系统采用的飞行平台主要为无人飞行器,大部分载重量为6 kg~15 kg,携带的相机基本上为普通佳能或尼康相机,无POS系统和LiDAR设备,因此造成像控点测量工作量大,且测量精度也不高。本文结合国外工程中采用有人轻型机作为飞行平台进行航空摄影与遥感系统工程实例,详细介绍了轻小型航空遥感系统特点和在电力工程中的运用情况。
二、系统介绍
轻小型机航测遥感系统主要组成为:轻型机飞行平台、高精度POS系统、惯性稳定平台、轻型数字测绘相机和轻型机载激光雷达。可根据不同应用需求以多种组合模式运行,组合模式主要包括稳定平台+POS+数字测绘相机、稳定平台 +POS+LiDAR+数字相机、稳定平台+数字测绘相机+GPS等不同模式的结构集成。通过系统框架的设计,在体积上和重量上满足轻小型飞行平台的要求。
1.有人轻型机飞行平台
有人轻型机飞行平台主要是为适应小面积航摄和低空高分辨率航摄的需求,而研制生产的轻型有人驾驶航摄机,巡航高度为200 m~11 000 m,信号传输作用距离视距 >200 km,最大遥感设备载重为120 kg,抗风能力能抗最大风力7级(约15m/s),抗雨能力能抗大雨,可以夜间作业,起降方式的主模式为轮式,辅助方式弹射起飞,或伞式回收等4种备份手段。根据上述要求,国内目前能够满足要求的航测飞机有蜜蜂、海鸥、海燕等。目前也有测绘单位采用动力三角翼等基本满足要求的飞行器(如图1所示)。
2.高精度POS系统
POS系统是采用动态差分GPS(DGPS)技术和惯性测量装置(Inertial Measurement Unit,IMU)直接在航测飞行中测定传感器的位置和姿态,并经严格的联合数据处理(卡尔曼滤波),获得高精度的传感器的外方位元素,从而实现无或极少地面控制的传感器定位和定向。由于轻小型航空遥感系统采用的数码相机幅面小,且飞行稳定性相对较差,因此必须要采用高精度POS技术。否则在数据处理和像控点测量方面,工作量比较大,而且测量精度比较低。根据国内工程实例以及行业调研,目前国内商业运用的无人机航空遥感系统进行大比例尺地形图测量,外控点测量工作量相当于常规地形图测量的1/4的工作量,而且测量精度也不高。
由于高精度POS系统长期以来受欧美等发达国家的限制,国内在此方面的研究也多用于军事,在国内民用航空摄影测量中采用高精度POS系统还没有真正意义上用于商业应用。目前国内的相关单位正在进行国内的航摄系统集成试验,估计在不久的将来,该系统的研制成功将对推动轻小型机航空遥感系统发展具有十分重大的意义。
3.数字测绘相机和轻型机载LiDAR
国内无人机航空遥感系统携带的相机大部分为普通的佳能或尼康相机,这对高精度轻小型航空遥感系统来说显然是不够的。根据国家863计划重点项目(2008AA121301)要求,轻型单镜头数字相机技术指标要求为:旁向视场角范围在 55°以上(50mm焦距);幅面为7K×5 K或6 K×5K(12 Bit,RGB三色);相机重量为5 kg~8 kg(不含电源)。轻型组合宽角数字测绘相机技术指标要求为:旁向视场角范围在90°以上;幅面为1.5亿像元以上(RGB三色);相机重量为20 kg~35 kg(不含电源);平面精度为±5 cm(有地标点);高程精度为±5 cm(有地标点)。轻小型机载激光雷达(Li-DAR)系统技术主要技术指标要求为:平面精度为±25 cm(航高500m,POS 方位精度0.008°,姿态精度0.005°); 高程精度为 ±12 cm(航高 500m,POS方位精度 0.008°,姿态精度 0.005°)(具体指标见国家863计划重点项目(2008AA121301))。根据国家863计划项目的介绍,目前数字测绘相机和轻型机载LiDAR均已研制成功,这将大大提高轻小型机航空遥感系统的测量精度。
三、国外工程实例
该工程位于南美洲国家,地理纬度为南纬40°,该工程分为两个子工程,分别为:输变电网工程和风电场工程,总面积将近700 km2。
1.输变电网工程
输变电网工程为带状区域测量,带状长度为400 km,带宽2 km,测量比例尺为平面1∶5000,垂直1∶500,航测工期1个月。测量单位为工程所在国测量公司,该公司提供的测量方案采用轻小型机航空遥感系统进行测量,系统设备组合模式为稳定平台+POS+LiDAR+数字测量相机,设备如图2所示。

图2 系统设备
飞机参数为:自重3750Lbs,任务载荷3150Lbs,飞行速度为120~140 Kts,巡航时间为4.5 h,最大飞行高度为731m;相机参数为:分辨率为6十万像素,有效像素数为8984×6732 pixels,幅面为53 904mm×40 392mm;LiDAR参数为:扫描高度范围为210~3500m,激光扫描视场范围为0°~ ±50°,扫描视场宽度为0.7×飞行高度(max),激光发射频率为0~70 KHz,激光回波采样为4回波,水平精度为1/5500×飞行高度,高程精度<5-20 cm。
该公司飞行设置参数和LiDAR设置参数如图3所示。
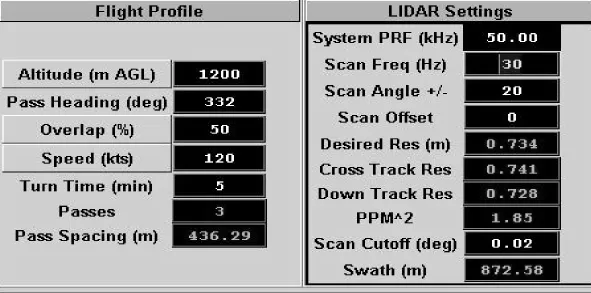
图3 飞行多数和LIDAR参数
该公司在带状区域两端分别架设一台GPS基准站,通过高精度的POS系统直接获取外方位元素,仅需要两端GPS基准站的坐标,无需进行像控点测量。该公司航拍时间为3~5天,内业数据处理时间为3个星期提交工程成品资料。通过对整个带状区域随机检查,其平面点位精度为0.35 cm,高程精度为0.18 cm,交叉跨越物高程精度为0.24 cm,完全满足《330 kV~750 kV架空输电线路勘测规范》(GB 50548—2010)中相关规定。
2.风电场工程
风电场工程为面状区域,面积为105 km2,丘陵地貌,测量比例尺为1∶2000,等高距为2 m,测量工期为1个月。由于风电场场址紧邻线路工程,测量单位为同一家单位,因此采用的航测设备和航测模式均与线路工程相同,仅在测量风电场场址时,将飞机高度降为600m。
该公司提交的成品资料经现场工作人员检查,其平面点位精度为0.29 cm,高程精度为0.21 cm,满足《工程测量规范》(GB 50026—2007)中相关要求。
四、结束语
轻小型航空遥感系统作为近几年来发展起来一项新的测量技术,弥补了卫星遥感系统和航空遥感系统对小区域大比例尺地形图测量成本高、航空手续复杂以及飞行气候和起飞条件要求较高等不利因素,在遥感领域具有很重要的地位,特别是在工程测量领域具有十分重大的发展前景。
同样,有人轻小型航空遥感系统相对于其他两种无人飞行平台的轻小型航空遥感系统也具有比较大的优势。首先,相对于无人机飞行平台,有人轻小型机平台具有飞行稳定性强,安全性能高,能够携带超过120 kg的高精度POS系统、测量数字相机和LiDAR等设备。目前商业运用的无人机大部分由于任务载荷仅为6~15 kg,仅仅只能携带普通相机,因此对于1∶1000和1∶500大比例尺地形图测量精度不高,而且地面工作量也比较繁重。如果采用任务载荷超过120 kg的无人机,其成本将会很高,而且飞行安全性低于有人轻小型机。同样,对于无人飞艇,由于无人飞艇充气成本高,稳定性差,因此应用比较少。
随着以中国测绘科学院等单位承担的国家863重点项目对数字测绘相机、高精度POS系统和轻小型机载LiDAR等关键技术的研制成功,欧美国家对我国高技术限制的解除,以及国内低空领域的逐渐放开,有人轻小型航空遥感系统将会迎来蓬勃的发展。
[1]李学友,李英成,肖金城.IMU/DGPS在我国航空遥感数据获取领域的应用展望[J].地理空间信息技术与应用——中国科协 2002年学术年会测绘论文集,2002.
[2]关艳玲,刘先林,段福州,等.高精度轻小型航空遥感系统集成技术与方法[J].测绘科学,2010,36(1):84-86.
[3]林宗坚.UAV低空航测技术研究[J].测绘科学,2010,36(1):5-9.
[4]刘经南,张晓红 .激光扫描测高技术的发展与现状[J].武汉大学学报:信息科学版,2003,23(2):132-137.