高分辨率遥感影像中农田灌溉设施的提取
2012-12-11乔贤哲杨建宇朱德海
乔贤哲,张 超,杨建宇,朱德海
(中国农业大学信息与电气工程学院,北京100083)
一、引 言
随着高空间分辨率遥感影像的迅速发展,其在耕地等级监测、国土资源调查、基础地理数据更新以及土地利用变化检测等方面都得到了广泛应用。其中,农田线状地物设施是影响农田质量的社会经济因素之一,因此它的正确提取具有重要的价值和意义。在我国的“十一五”国家科技支撑计划“信息化测绘技术服务体系关键技术研究与应用”中也曾明确提出要对遥感影像中重要的地形要素如道路、居民地等主要基础地理要素进行快速识别[1]。然而,面对现在各级监管部门实时监管的要求,传统的人工解译和半自动解译工作越来越不能达到人们的需求。遥感技术由于具有周期短、精度高、可操作性强、信息更新和提取速度快等特点,而逐渐得到了相关研究人员的青睐。本文采用两个地区卫星遥感影像作为数据源,利用面向对象分类的方法进行主要农田灌溉设施(沟渠)提取的研究。
二、试验与方法
1.试验区及遥感影像选取
本研究选取的试验区是江苏省扬州市邗江区。邗江区地处江淮平原南端,地理坐标是东经119°01'~119°54',北纬 32°15'~32°25',属北亚热带温暖亚带与温和亚带的过渡性地带,气候及土壤条件适合多种农作物生长。邗江区是鱼米之乡,拥有可供开发生产农业的良田35 km2和长江水产的水面50 km2。此区域内地上水资源丰富,河道水面多,农田灌溉系统发达,适于作为本研究的试验区域。考虑到试验区气候对地物表面覆盖的影响和道路的光谱特征,研究选择拍摄于夏季的高分辨率遥感影像。比较了各卫星高分辨率遥感影像的可用性之后,本研究选择WorldView-Ⅱ卫星高分辨率遥感影像。表1是WorldView-Ⅱ卫星的基本参数信息。

表1 WorldView-Ⅱ卫星影像参数
为了充分利用影像的高空间分辨率和多光谱信息。本研究使用主成分变换将0.5m分辨率的全色波段和1.8m分辨率的多光谱波段进行融合,得到了0.5m分辨率的多光谱遥感影像。图1是融合后的遥感影像。
2.基于面向对象分类的农田灌溉系统自动化提取
(1)技术流程
面向对象分类方法是本研究提取农田中灌溉设施的技术核心。该方法以影像对象为最小分类单元,在较高层次上对遥感影像进行分类。它弥补了传统的基于像元的分类方法存在的语义信息缺陷,使分类结果更加精确,而且富含语义信息。其分类过程大体分为3个步骤:影像分割、特征选取、规则建立及分类[2]。图2是技术流程图。
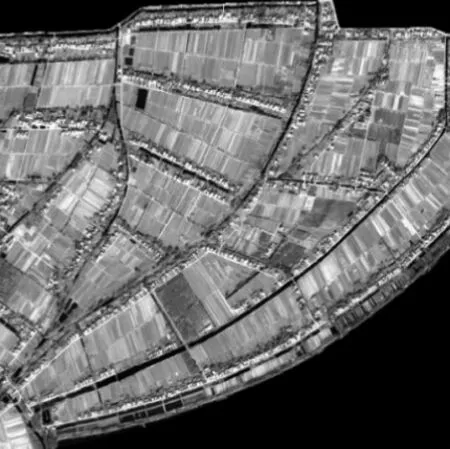
图1 融合后试验区遥感影像图

图2 农田灌溉设施提取技术流程图
(2)影像分割
影像分割是面向对象分类方法中最为基础和关键的一步,影像分割结果的好坏,直接影响着影像的分类结果。影像分割就是在基于像素的基础上依据参数设置将影像分割为大小不同的影像对象,参数设置的要求是尽量满足单个影像对象内部的差异性和不同影像对象之间的同质性,同时达到最小。
对于大部分采用面向对象分类方法提取道路的研究都是直接对影像进行分割。本研究初期考虑农田中灌溉系统边缘信息明显,故先对影像进行了边缘提取,然后将提取出的边缘影像也作为遥感影像的一个图层,最后通过设置影像各个图层权重,来控制不同图层对影像分割的作用[3]。但发现会出现较多的错分割现象,对于后续的分类影响很大,所以最终对边缘图层的权重设为0。同时,研究还发现由于沟渠中有水,水对红光反射强度相对其它地物低很多,所以将红光图层的权重设为5。另外,分割尺度设为90,形状因子设为0.5,紧凑度设为0.5。图3是多尺度分割结果图。
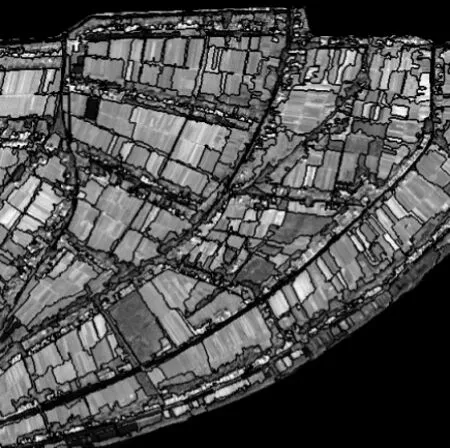
图3 多尺度分割结果图
(3)影像的特征选择
影像分割将影像划分为若干影像对象,这些影像对象包含了许多可用于分类的特征:光谱特征、形状特征、纹理特征等,每一类特征包含若干指标。灵活地组合运用这些特征可以提取到特定的地物信息。
本研究中农田灌溉设施与周围地物的光谱信息明显不同,同时沟渠的空间形状呈带状分布。因此本研究主要利用影像的光谱信息和形状特征来提取农田灌溉设施。由于部分沟渠被行道树遮蔽,造成了混合像元的情况,如果光谱特征选择NDVI,就会出现大量错分类现象,从而不能把沟渠很好地提取出来,所以仍然考虑沟渠中有水的情况,这里光谱特征选择红光波段的辐射均值,如此就可以把被行道树遮蔽的沟渠和其他绿色植被区分开。形状特征选择影响对象的宽度。采用隶属度分类,两个特征的阈值设为“mean layer 2<40”和“width<60”。图4是农田灌溉设施分类结果图。
(4)中心线提取及矢量输出
经上述面向对象分类的3个步骤之后,技术流程可以提取得到农田灌溉设施的面状信息。这些面状信息是一些形状狭长的多边形,还需要进行进一步的矢量化,以得到农田线状地物的矢量图形。此方面研究还处于研究阶段,预采用的方法是数学形态学相关内容,本文不作过多描述。

图4 沟渠分类后结果图
3.结果与分析
为了检验基于面向对象分类的自动化提取方法识别结果的优劣,本研究还与监督分类法的提取结果进行了比较。两种方法均使用本研究所选试验区范围的影像数据,其中监督分类法采用最大似然分类方法,这种分类方法与其他监督分类方法相比,分类精度较高,且计算时间短,是最常用的分类方法之一。图5与图6分别是用两种方法提取出的沟渠结果图。
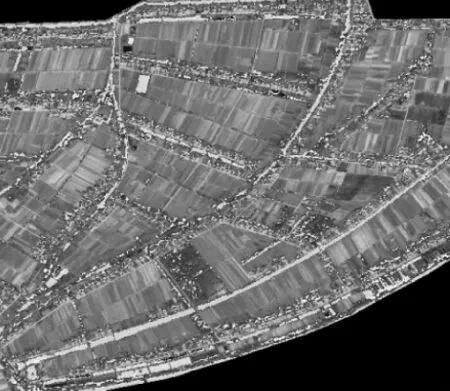
图5 最大似然分类提取沟渠结果图
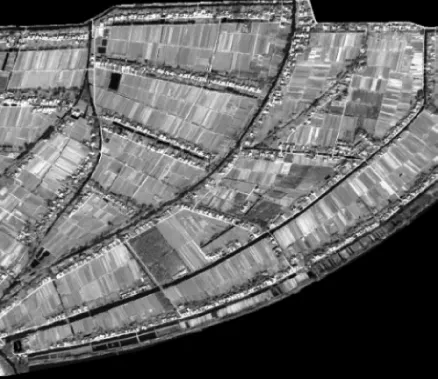
图6 面向对象分类提取沟渠结果图
从提取结果看,用监督分类方法中最大似然分类法提取农田灌溉设施的效果会出现较多的错分现象,线状地物的连续性遭到破坏,与理想的提取效果相差较大。而采用面向对象分类方法提取线状地物的结果,相对最大似然分类法出现错分类情况要少得多,能较好地提取出农田灌溉设施。
三、结束语
针对当前农田中线状地物识别研究自动化程度不高的问题,本研究采用基于面向对象分类的识别方法,利用WorldView-Ⅱ高分辨率遥感影像数据对农田灌溉设施进行了自动化识别提取,并与监督分类方法对比试验结果。研究表明,基于面向对象分类的自动化提取方法可以自动识别农田中的灌溉设施,识别效果较好,提取所需时间较短。因此,面向对象分类的自动化提取方法,是一种快速而高效的监测手段,为农田中线状地物监测和耕地的分等定级工作提供了一种科学的技术支持。
但在试验中还发现,面向对象分类方法对于影像中被行道树遮挡或阴影区域中的灌溉设施以及无水或少水的沟渠,直接进行分类并不能获得很好的提取效果,会出现漏分、错分情况,这将是本研究后续工作中待解决的问题之一。
[1]陈柏松,游娟,潘瑜春,等.农用地等级质量监测指标体系与方法[J].农业工程学报,2009,25(2):272-276.
[2]吴健生,刘建政,黄秀兰,等.基于面向对象分类的土地整理区农田排灌系统自动化识别[J].农业工程学报,2012,28(8):25-31.
[3]黄亮,左小清,冯冲,等.基于Canny算法的面向对象影像分割[J].国土资源遥感,2011,4:26-30.
[4]许迪,李益农,蔡林根,等.卫星遥感影像在农田排灌系统识别中的应用研究[J].农业工程学报,2004,20(2):36-39.