某遥控武器站行进间射击炮口振动特性研究
2012-11-22戴东明毛保全王传有吴永亮
戴东明,毛保全,徐 礼,王传有,吴永亮
(装甲兵工程学院,北京 100072)
遥控武器站[1]与传统车载武器相比优势明显。武器操作手只需要通过遥控的方式在具有良好防护性能的车体内对目标进行搜索、瞄准和射击,大大提高了士兵的战场生存能力。武器站应具备在快速机动过程中对目标进行连续、精确射击的能力。为了解遥控武器站在车载行进条件下连续射击的情况,特别是武器站上车过程中须要考虑的影响因素和应该注意的问题,可在虚拟环境中建立路、车、武器站一体化动力学模型,进行动力学仿真分析。
1 路、车、炮一体化动力学模型
进行行进间连续射击动力学仿真,获取炮口振动特性,需分别建立[2]路面、车辆底盘及武器站三大模型,而后在RecurDyn动力学仿真软件环境中生成一体化动力学模型。
1.1 遥控武器站动力学模型
遥控武器站三维模型在三维实体建模软件SolidWorks中建立,并将生成的*.x_t文件导入动力学仿真软件RecurDyn中,建立动力学模型。
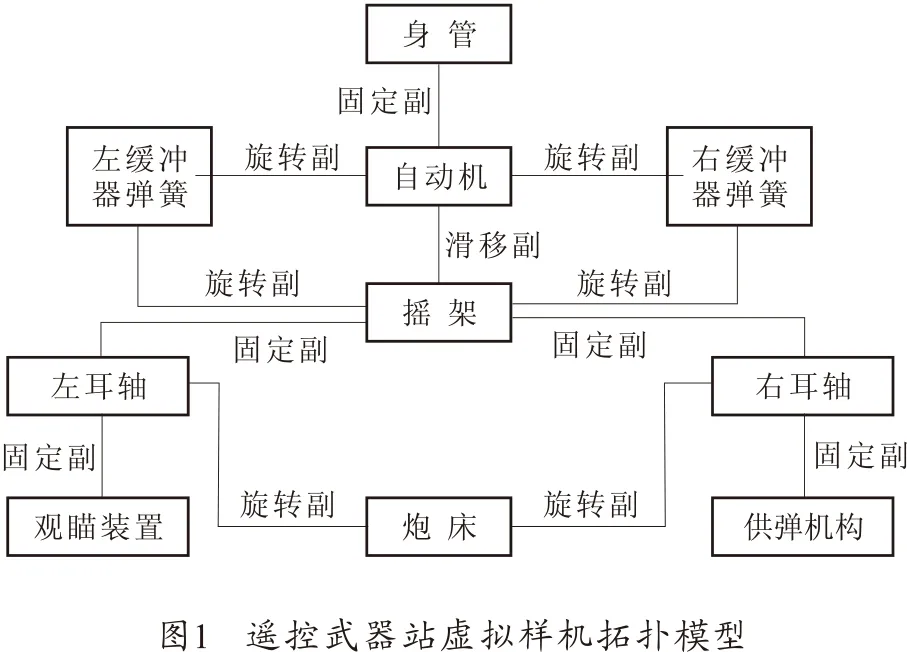
对模型进行合理的简化处理后,其多刚体动力学模型及约束如图1所示。其中身管与自动机固定,射击时沿身管轴线作往复运动。观瞄装置、摇架、供弹机通过左右耳轴安装在炮塔上,绕耳轴轴线作旋转运动。炮塔与车体相连,在方向机的作用下作回转运动。自动机前侧左右分别安装有缓冲簧,运用平动弹簧阻尼驱动器(TSDA)力元件来模拟。缓冲簧的刚度系数、阻尼系数根据该炮的原始设计参数确定。火炮射击时的冲击载荷通过spline曲线进行模拟,数据来自经过Matlab处理后的实弹射击数据。
1.2 车辆底盘动力学模型
底盘部分包括1个车体和左右两侧履带子系统,车体部分由三维实体建模软件SolidWorks生成的*x_t文件转化而来,履带环子系统通过RecurDyn/Track(HM)建立。履带子系统[3]由主动轮、诱导轮、拖带轮、负重轮和悬挂装置(油气悬挂、平衡肘)等组成。每侧履带环子系统由96块履带板通过履带端连器连接而成一个封闭的环状结构。车体左右两侧分别由1个主动轮、1个诱导轮、5个负重轮、3个拖带轮、5个平衡肘组成。
车辆底盘虚拟样机模型,如图2所示。底盘主动轮前置,采用双销式履带、双轮缘负重轮。悬挂系统采用油气悬挂,将试验得到的弹簧力和阻尼力数据拟合后,运用转动弹簧阻尼驱动器(RSDA)力元件来模拟刚度和阻尼特性。负重轮通过平衡肘与车体相连,平衡肘一端通过旋转副与负重轮连接,另一端通过旋转副与车体连接。履带板实体建模所用的参数大部分来源于工程设计图纸,其他暂不能获得的参数依据经验值的范围不断进行调整而最终确定。履带板之间、履带板与地面、负重轮之间以及主动轮之间的接触力分别根据相应的刚度系数、阻尼系数以及几何尺寸等参数来确定。根据该车的原始设计参数以及三维实体模型,确定各部件的几何参数和性能参数,以及不同实体之间的约束关系,具体见表1。
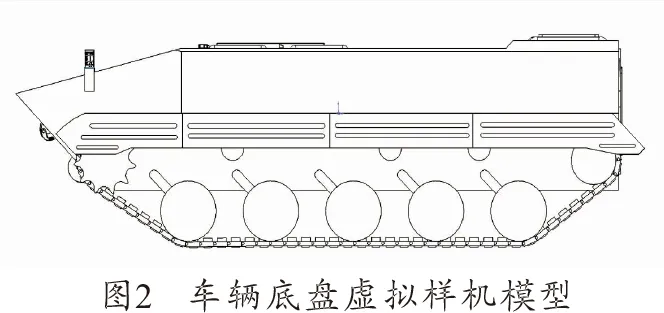
表1 遥控武器站多刚体模型部件及约束关系
名称数量约束备注车体1平面同地面主动轮2旋转铰同车体诱导轮2旋转铰同车体托带轮6旋转铰同车体负重轮10旋转铰同车体履带板192轴套履带板间
1.3 路面模型
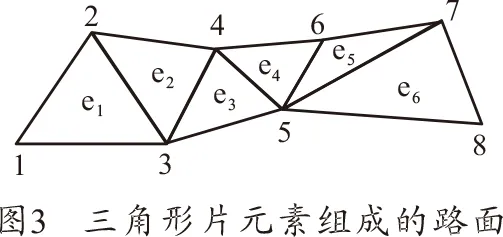
RecurDyn使用离散地形表示法[3]来描述地形,这种方法利用三角形片元素构成路面,如图3所示,每片有3个节点和1个表示地面平面方程的法向量。图3是用8个节点6个三角形片元素所组成的虚拟路面轮廓,使用这种方法可以编写不同的路面数据文件,建立诸如凹凸路面、沟壕路面、倾斜路面、障碍路面等路面的模型。
建立了3种典型路面谱模型,分别是柏油、干沙、粘土等路面模型,路面参数见表2。
表2 柏油、粘土与干沙路面参数
履带与路面之间的碰撞参数决定了接触压力,路面类型和路面参数[4]在履带子系统进行定义。
1.4 路、车、炮三大模型耦合
模型耦合的关键,是各模型间的接触关系。车体部分通过定义履带子系统与路面文件的接触特性,实现路面激励向车辆底盘的传递;武器站系统与车辆底盘通过旋转副连接。
车载遥控武器站在行进过程中,路面激励传递途径如图4所示,经履带、悬挂、车体到武器站系统,最后振动特性在炮口中心处体现。
2 仿真结果与分析
进行动力学分析前,可以从静平衡位置分析方面来验证模型的有效性[4],检验模型的约束条件、初始条件等,及时发现错误。让整车模型在自身重力作用下自然落到水平地面上,图5为整车车体质心垂向位置变化曲线,由图可知质心垂向静止位置在刚开始时发生上下振动,但约在2 s后不再变化,从而说明了模型是有效的。
行驶时,主动轮的运动函数依次设定为:
STEP(TIME,0,0,5,720d)
STEP(TIME,0,0,5,1440d)
STEP(TIME,0,0,5,2160d)
运动函数的意义是:随着主动轮转速的变化,整车从0 s开始加速,到5 s时达到目标速度10、20、30 km/h。射击载荷从第7 s开始加载,共10连发,作用时间约2 s。火炮方向角为0°,射角为3°。
图6~图8分别是遥控武器站在不同的行驶条件下,进行行进间射击时,炮口中心的垂直振动曲线。
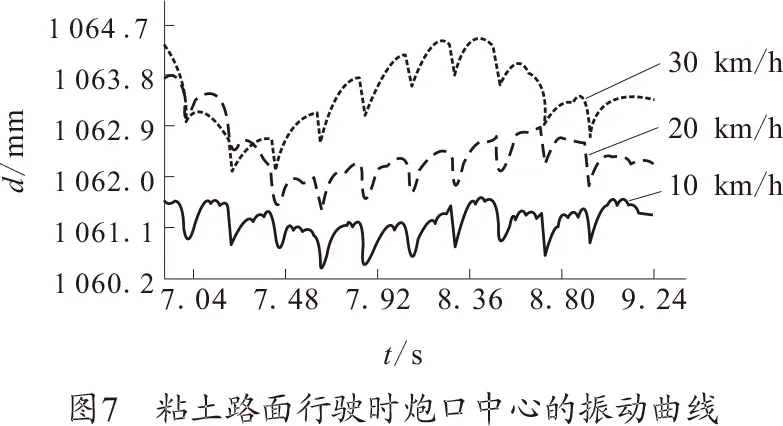
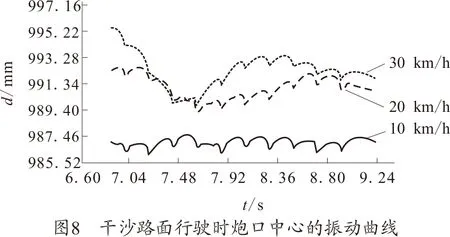
从图中可以看出,遥控武器站作行进间射击时,炮口中心的振动情况在不同的行驶条件下呈不同的特点。在粘土和干沙路面进行行进间射击时,行驶速度越高,炮口中心的振幅越大。以10 km/h的速度行驶时,曲线比较平整,炮口中心的振动主要受火炮后坐运动与路面激励的影响。以20 km/h和30 km/h的速度行驶时,炮口中心的振动随着速度的提高更加剧烈,其主要原因,是车体发生了明显的前后俯仰运动。而在柏油路面行驶时,在30 km/h和10 km/h的速度下,炮口的振动曲线相似,说明在这两种条件下,车体并未发生明显的俯仰运动。
行驶速度较高的曲线一般都在行驶速度较低的曲线上方,主要原因是车辆在通过路面的过程中发生了一定程度的沉陷,路面越软,沉陷的程度越大;行驶速度越慢,履带与路面的作用时间越长,沉陷的程度越大。
表3是不同行驶条件下炮口中心的振幅情况。在同一行驶速度下,柏油路面的振幅最小,粘土路面次之,干沙路面最大。
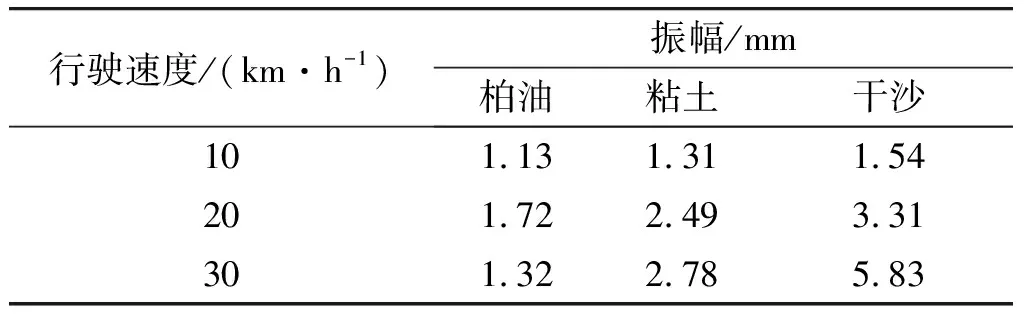
表3 不同行驶条件下炮口中心的振幅
3 结 论
通过建立路、车、炮一体化动力学模型,对遥控武器站进行了行进间射击仿真分析。连续射击时,炮口中心的振动情况在不同的行驶条件下呈不同的特点。研究结果表明:
1)路面激励和车体俯仰运动对炮口振动的影响比火炮后坐运动对炮口振动的影响要大。
2)行驶速度越高,车体越容易产生俯仰运动,对炮口动态稳定性影响越大。
3)行驶速度相同时,遥控武器站在硬质路面行驶时射击的炮口振幅比在软质路面时要小。
为提高射击精度,驾驶员在驾驶车辆作战时,应尽量使车辆行驶平稳;武器站操作手应尽量在路况较好、低速或者静止的条件下对目标进行射击。
参考文献(References)
[1] 毛保全,王传有.某型遥控武器站射击密集度仿真与优化[J] .装甲兵工程学院院报,2010(4):36-40.
MAO Bao-quan,WANG Chuan-you.Simulation and optimization of shooting density of certain remote control weapon station[J].Journal of Academy of Armorel Force Engineering,2010(4): 36-40.(in Chinese)
[2] 毛保全.车载武器发射动力学[M].北京:国防工业出版社,2010:9-10.
MAO Bao-quan.Firing Dynamics of vehicle mounted weapon[M].Beijing:Natinal Defense Industry Press,2010:9-10.(in Chinese)
[3] 陈树勇,孙逢春. 电传动履带车辆驱动系统建模与转向特性研究[J].系统仿真学报,2006(4):2815-2818.
CHEN Shu-yong,SUN Feng-chun.Electric drive track-driven vehicle and steering charasteristics of the system modeling[J].Journal of System Simulation,2006(4):2815-2818.(in Chinese)
[4] 戴瑜,刘少军. 履带车多刚体建模与仿真分析[J]. 计算机仿真,2009,26(3):281-285.
DAI Yu,LIU Shao-jun.Track vehicle multi-body modeling and simulation analysis[J] Computer Simulation,2009(3) :281-285. (in Chinese)
