基于机器视觉的火炮内膛全景窥测设备研究
2012-11-22傅建平张丽花吴定海
傅建平,张丽花,雷 洁,吴定海
(军械工程学院 火炮工程系,河北 石家庄 050003)
火炮长期使用后,内膛会出现烧蚀、磨损、裂纹、阳线断裂、严重挂铜与锈蚀等疵病,直接影响到火炮射击精度、火炮寿命和射击安全性,因而火炮射击前后都必须进行火炮内膛窥测[1]。而火炮内膛是一个深孔的内表面,必须通过检测仪器来窥测,急需研制先进的窥膛设备,满足部队维修保养需求。现有窥膛设备多数采用“内膛扫描”式窥膛方式,需要图像拼接,无缝拼接难[2-3]。笔者结合部队装备使用与技术保障特点,应用半球全景成像与图像处理技术研制了先进的新型火炮内膛窥测设备,实现火炮内膛窥测自动化、内膛质量评估智能化。
1 火炮内膛窥测设备组成
1.1 设计思想
1)全景采集。火炮内膛图像采用半球全景镜头采集,一次成内膛全景图像,免去图像拼接,采集速度快。
2)摄像与摄影方式兼顾。摄像是指对全膛录像,用于全膛质量的一般监控,以视频文件方式保存;摄影是指重点部位拍照,对内膛疵病部位重点检测,以图像文件保存。摄像与摄影的分辨率与帧数等参数可调。
3)爬行自动。内膛窥测设备在内膛自动/半自动爬行,爬行方向、爬行距离和爬行速度等参数可控。
4)智能分析。具有图像分析与疵病识别功能。
5)通用性好。适用于口径为100~155 mm的大中口径火炮。
1.2 系统组成
火炮内膛窥测设备由火炮内膛爬行装置、内膛爬行控制装置、测控计算机及配套软件等4部分组成,系统组成及各部分连接如图1所示。

2 火炮内膛窥测爬行装置
火炮内膛窥测爬行装置由半球全景镜头、爬行机构与动力传动机构3部分组成。
2.1 图像采集镜头
图像采集镜头位于爬行装置的前部,主要用于爬行装置在爬行过程中按要求采集火炮内膛图像,由半球全景光学镜头和CCD光电成像镜头两部分组成,前者将火炮内膛表面转换成光学全景图像,后者则将内膛全景图像转换成数字图像,各自参数见表1和表2。

表1 光学全景镜头参数
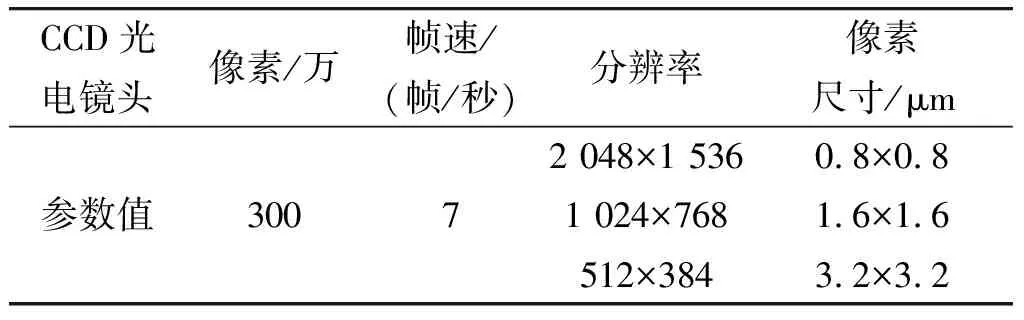
表2 CCD光电镜头参数
火炮口径越大,全景图像中的炮膛内壁面积越大,要求数字图像分辨率越高。半球全景镜头采集得到图像清晰,分辨率高,可达到1 mrad,可以用于火炮内膛窥测;用300万像素CCD摄像头,帧速达7帧/秒,在2 048×1 536分辨率下,采集155 mm口径的火炮,像素实际尺寸达到0.8 μm×0.8 μm,像素分辨率满足内膛疵病窥测需求。
图2为经全景环形透镜(PAL)拍摄得到的火炮内膛全景图像,每一圆周对应火炮内膛轴向不同部位的圆周景像,且沿炮膛轴向的投影半径呈非线性变化。

2.2 爬行机构
爬行机构位于爬行装置的中部,分为前后两组,前组起导向,后组为驱动。爬行机构具有足够摩擦力,防止在内膛打滑,由弹簧刚度保证;爬行脚具有一定宽度,确保在阳线上直线爬行,采用耐磨橡胶轮,以减小对炮膛内壁的磨损。
2.3 动力传动机构
动力传动机构位于爬行装置的后部。采用步进电机为动力源,经齿轮传动后,将动力传递给爬行脚,以驱动爬行装置在内膛爬行。
3 火炮内膛窥测爬行控制装置
火炮内膛窥测控制装置(如图3所示),通过FT232RL型USB接口转换芯片,接收上位机给出的爬行方向、爬行速度、爬行距离等指令,产生相应的步进电机脉冲数、脉冲频率及脉冲极性,控制步进电机的运行。其框图如图 3,由步进电机控制器、步进电机驱动器和电源3部分组成。

直流稳压电源用于将220 V、50 Hz交流电转换为24 V、5 V直流电,供步进电机、驱动器、控制器使用;步进电机驱动器用于对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动;步进电机控制器根据上位机给出的爬行装置的爬行方向、速度、距离,计算并产生相应的步进脉冲数、脉冲频率及脉冲极性。
4 火炮内膛窥测软件
4.1 软件组成与功能
火炮内窥窥测软件主要包括控制软件、图像分析软件和数据管理软件3部分,其框图如图4所示。其中控制软件包括爬行控制与图像采集控制;图像分析包括全景图像展开、内膛疵病分析;数据管理包括分析结果管理与火炮参数管理。
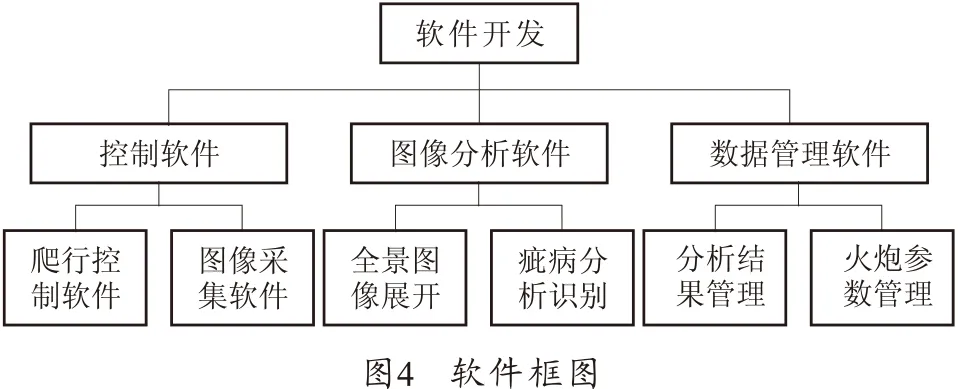
图5为软件主界面,左侧为功能框,包括“基本设置”、“系统校验”、“火炮检测”、“数据管理”、“系统帮助”与“退出系统”六大功能。

1)基本设置。主要对步进电机控制程序的端口、波特率、数据位、停止位,全景镜头采集的图像格式、录像格式、默认保存目录设置。
2)系统校验。分系统自检与校验两部分,自检为步进电机与全景镜头通信自检,绿灯为正常,红灯为异常,并在自检信息提示框内提示异常信息。
校验用来修正爬行装置在膛内打滑而少爬的距离。爬行装置在不同口径火炮内膛爬行,或多或少会出现打滑现象,通过比较爬行设定距离与实测距离,通过软件修正。
3)火炮检测。包括图像采集、图像分析与报表管理,是软件重点,在下节内容介绍。
4)数据管理。提供了火炮内膛标准图像库、在役火炮参数库,可对火炮数据实施管理。
5)系统帮助。概述系统功能和操作,便于客户使用。
4.2 火炮内膛图像分析
4.2.1 火炮内膛全景图像展开
二维环形全景图像,不便于非专业人员观察与分析,需将环形像转换成传统矩形图像。内膛全景环形图像展开分二步:径向非线性展开和切向非线性展开[4]。
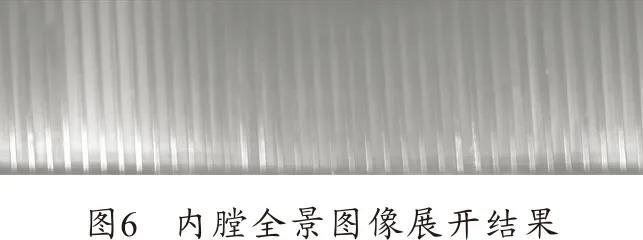
图2所示的火炮内膛环形图像展开成如图6所示的矩形全景图像,其膛线缠角、阴阳线宽度计算值与火炮膛线参数相一致。
4.2.2 火炮内膛区域划分
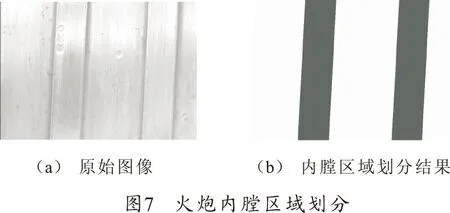
火炮膛线分为阳线与阴线。阳线磨损、阳线断裂等内膛疵病处在阳线上,识别前必须对其定位,即需将内膛划分成阳线、阴线区域两部分。Radon图像变换法对方向性敏感、抗噪能力强,内膛区域划分精度高[5],图7(a)为内膛压痕图像,区域划分结果为图7(b),能为内膛压痕疵病正确定位。
4.2.3 火炮内膛图像预分类
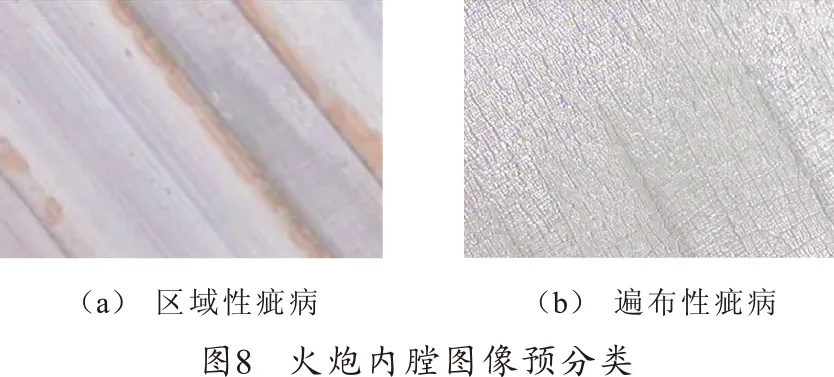
不同使用阶段的火炮内膛图像千变万化,用统一的疵病分析识别方法十分困难。结合内膛疵病机理及疵病图像边缘特征,通过定义对方向敏感、便于实施不同分类方法的内膛图像预分类因子,将内膛图像分成“区域性疵病图像”与“遍布性疵病图像”[6]。如图8(a)为内膛锈蚀图像,属区域性疵病;8(b)为内膛烧蚀图像,属遍布性疵病。
4.2.4 火炮内膛疵病分析
对区域性疵病图像与遍布性疵病采取不同策略(如图9):前者首先对其进行图像分割,将疵病与背景分离;再提取疵病的形状、纹理与颜色等27个特征,并应用模糊粗糙集理论将特征约简成8个敏感特征;而遍布性疵病直接提取其5个纹理特征。
最后依据疵病特征完成疵病识别。由于内膛图像数量较少,而传统的学习方法对驯良样本数量有很强的依赖性,为了达到较好的分类效果,本文采用最小二乘支持向量机对内膛疵病进行识别,实现了内膛疵病小样本的分类[7]。

4.2.5 火炮内膛疵病分析报表
主要完成疵病图像识别结果的保存和打印。内容包括:装备单位、火炮类型与型号、炮号、检测人员与检测时间等装备管理信息;疵病原始图像与疵病分割图像信息;优化后的8个疵病特征信息;缠角、阳线宽与阴线宽等火炮膛线参数信息;窥测结论,如疵病预分结果、疵病类型与针对性维修建议。
5 结 论
本文根据内膛窥测设备指导思想,综合运用全景成像、图像处理与人工智能等新技术,研制了一种基于机器视觉的火炮内膛窥测设备,分析了设备硬件结构原理和软件的功能。该窥测设备技术先进、功能完备,较好地实现了火炮内膛自动窥测与智能分析,具有很强的实用性和推广应用价值。
参考文献(References)
[1] 张培林,李国章,傅建平. 自行火炮火力系统[M]. 北
京:兵器工业出版社.2002.
ZHANG Pei-ling,LI Guo-zhang, FU Jian-ping. The fire system of self-propelled gun[M]. Beijing:The Publishing House of Ordnance Industry, 2002.(in Chinese)
[2] 李玉兰,郑海起.火炮身管内膛疵病检测现状与展望[J].军械工程学院学报, 2009,21(1):48-52.
LI Yu-lan, ZHENG Hai-qi. Present state and perspectives of gun bore flaw detection[J]. Journal of Ordnance Engineering College, 2009,21(1):48-52.(in Chinese)
[3] 刘晓光.火炮多参数智能检测平台[D].长春:长春理工大学,2005.
LIU Xiao-guang. Gun multi-parameter intellectual detection flatform[D].Changchun:Changchun Science and Technology University,2005.(in Chinese)
[4] 雷洁,傅建平.基于边缘检测和最优参数的全景图像插值复原[J].科学技术与工程,2011(3):1077-1980.
LEI Jie, FU Jian-ping. Panoramic image interpolation recover based edge detects and best parameter[J]. Technology Engineering, 2011(3):1077-1980.(in Chinese)
[5] 郭琦,傅建平.火炮内膛图像膛线识别及其参数计算方法研究[J].科学技术与工程,2010(23):5789-5792.
GUO Qi, FU Jian-ping. Research for rifling recognition on gun bore image[J]. Technology Engineering, 2010(23), 5789-5792.(in Chinese)
[6] 雷洁,傅建平,郭琪.线膛火炮内膛疵病图像分类研究[J].激光与光电子学进展,2011(12):1-5.
LEI Jie, FU Jian-ping, GUO Qi. Research on the classification of rifling gun bore flaw image[J]. Laser and Optoelectronics Advance, 2011(12):1-5.(in Chinese)
[7] 郭琦,傅建平,雷洁.基于遗传算法与支持向量机的火炮内膛疵病分类方法研究[J].军械工程学院学报,2011(2):46-48.
GUO Qi, FU Jian-ping, LEI Jie. Classifying method of gun bore flaw based on improved genetic algorithm and support vector machine[J]. Journal of Ordnance Engineering College, 2011(2):46-48.(in Chinese)
