一类具有饱和因子的奇异时滞系统的鲁棒保性能控制
2012-11-02李洁坤
陈 璟, 李洁坤
(柳州师范高等专科学校数学与计算机科学系,广西柳州 545004)
一类具有饱和因子的奇异时滞系统的鲁棒保性能控制
陈 璟, 李洁坤
(柳州师范高等专科学校数学与计算机科学系,广西柳州 545004)
研究了具有饱和因子的非线性奇异时滞系统的鲁棒保性能控制问题.目的是设计一个鲁棒控制器和保成本控制器,通过线性矩阵不等式方法(LMI)得出了鲁棒控制器和保性能控制器存在的充分条件.当这些LMI方法是可解时,分别给出了鲁棒控制器和保性能控制器的解析表达式.
不确定奇异系统;鲁棒控制;保性能控制;LMI方法
1 引 言
因为奇异系统理论在实际中的广泛应用而受到越来越多的关注,特别是线性奇异系统的H∞控制问题的研究有了很大的发展[1-4].非线性奇异系统的研究也有一定的进展,文献[5-6]讨论了非线性广义系统的鲁棒控制问题,得到了有意义的结果.本文研究具有饱和因子并含有不确定参数的非线性时滞广义系统的鲁棒保性能控制问题,通过线性矩阵不等式方法(LMI)得出了鲁棒控制器和保性能控制器存在的充分条件.当这些LMI方法是可解时,分别给出了鲁棒控制器和保性能控制器的解析表达式.
2 问题描述
考虑如下不确定广义系统:

式中x(t)∈Rn,u(t)∈Rm,ω(t)∈Rq,Z(t)∈Rp分别是系统的状态向量,控制输入,干扰输入和控制输出;A,B,B1,B2,B3,C,D是已知的适当维数实常矩阵.ΔA,ΔA1,ΔB1,ΔB,表示适当维数不确定矩阵.E∈Rn×n为奇异矩阵,且rand(E)=r<n(n为系统维数).饱和因子


假设参数不确定项都具有如下结构:

其中H,E1,E2,E3是己知的适维数的常数矩阵,F(t)是满足不等式FT(t)F(t)≤I的约束函数矩阵,F(t)的每个元素是Lebesgue可测的.
对系统(1),选取性能指标函数

式中Q>0,R>0为给定的对称正定加权矩阵.
本文将考虑设计一反馈控制器

使系统(l)是保性能控制系统.
将式(5)运用到式(l)中,得闭环系统

3 主要结果
为了讨论系统(1)的保性能控制,先给出如下引理.
引理1[7]广义系统=Ax(t)+A1x(t-h)是正则、无脉冲且稳定的,如果存在矩阵Q和矩阵P,使得

定理1给定常数γ>0,对于不确定性广义闭环系统(6)和不确定性矩阵(2)以及性能指标(4),如果存在矩阵Q>0及可逆矩阵P>0,P∈Rn×n和存在ε>0,使得不等式


则不确定性广义系统(1)为H∞保性能系统.且u(t)=Kx(t)是系统(1)的一个H∞鲁棒保性能控制器,性能指标函数(4)存在上确界


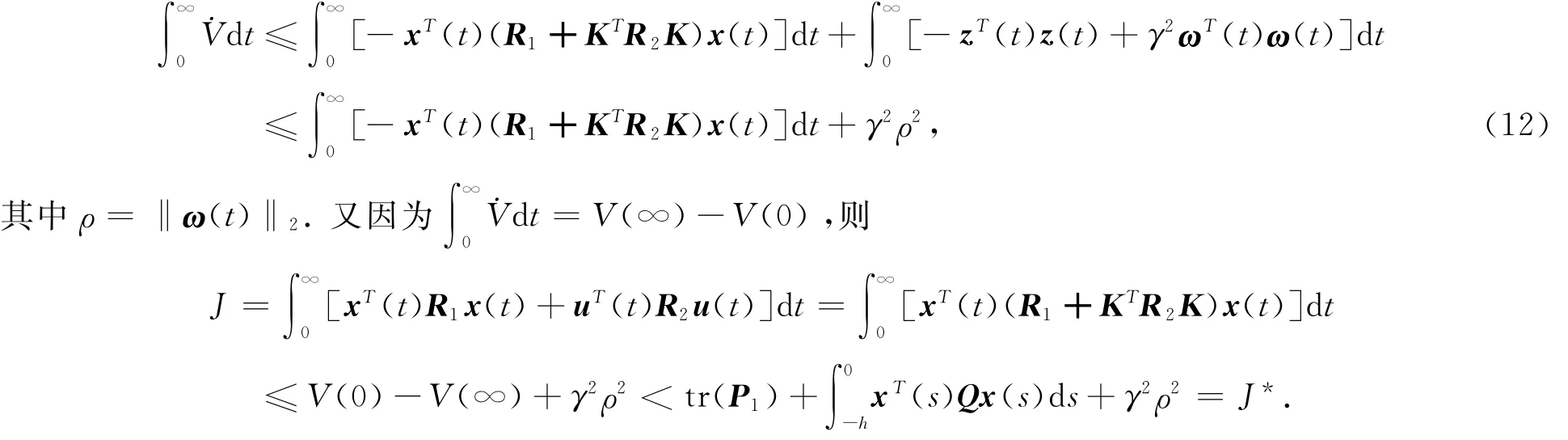
在给定的零初值条件下,对于给定的常数γ>0,令


由Schur补性质可知,N<0等价于式(8)成立,所以由式(11)可得‖z(t)‖2≤γ‖ω(t)‖2.
同时不考虑干扰,即ω(t)=0,由于(8)成立,则

成立.再由Schur补性质得

又由式(3)和(9)得ETP=PTE≥0.根据引理1可知系统(6)稳定、正则且无脉冲.
由式(8)和(10)并运用Schur补性质,有
综上,由定义1得定理的结论成立.
定理1给出了系统(1)的H∞保性能鲁棒控制器存在的一个充分条件,但由于式(8)中含有系统的不确定参数矩阵,因此不能直接用于控制器的设计,下面将不确定项消去.
(8)等价于
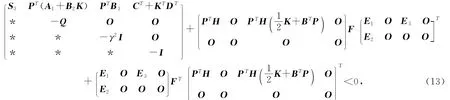

应用矩阵的Schur补性质式(13)对所有的不确定性成立当且仅当存在常数ε>0,使得
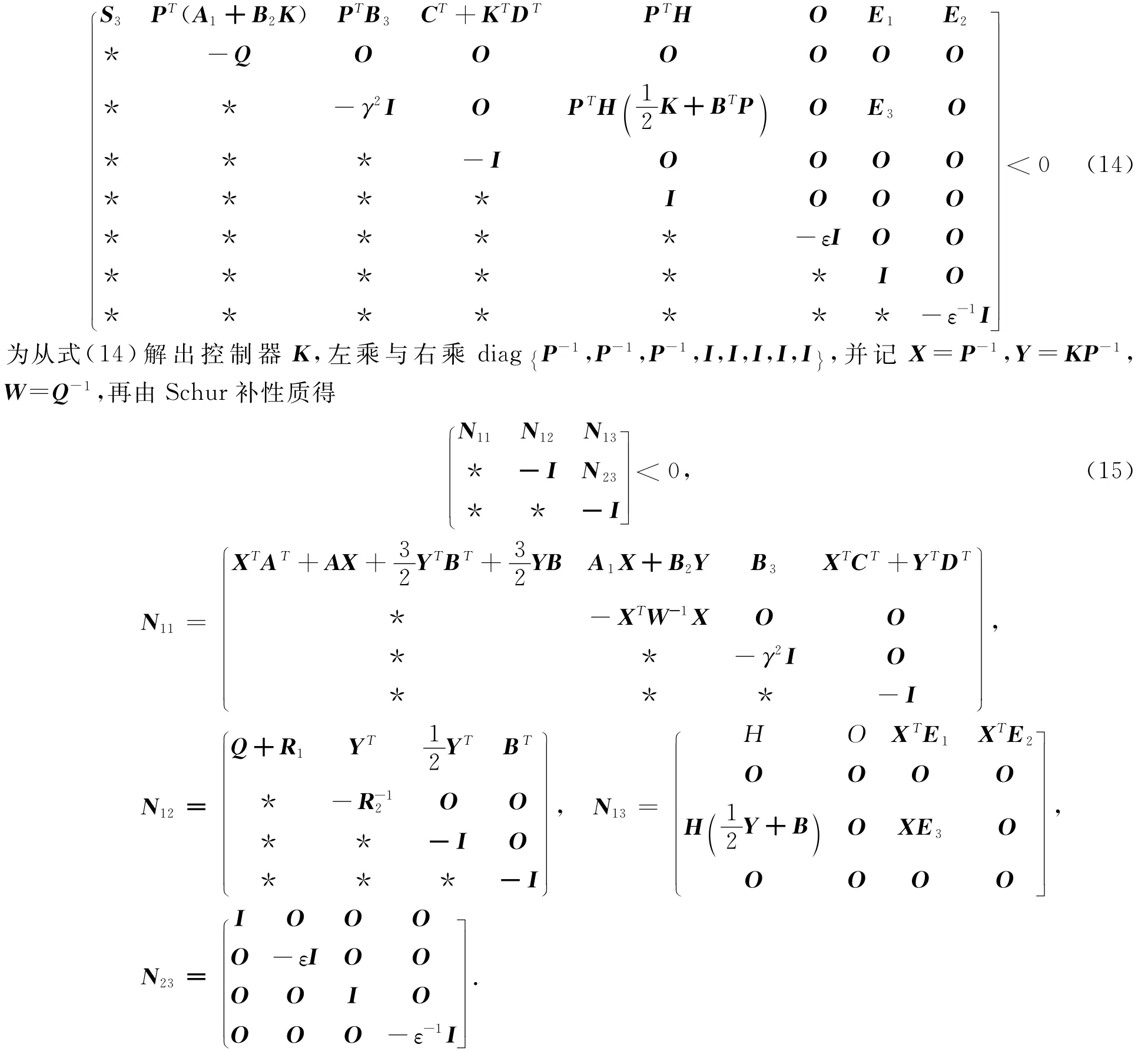
综上所述,得
定理2给定常数γ>0,对于系统(1)和性能指标函数(4),存在状态反馈控制器K使得闭环系统(6)是H∞保性能系统当且仅当存在适当常数ε>0,具有适当维数的矩阵Y,W和非奇异X∈Rn×n,使得对所有的不确定性,不等式(7)和(15)成立.
此时闭环系统H∞保性能器为u(t)=YX-1x(t),相应的可保性能指标为

4 结束语
本文研究了一类状态方程带有时滞与饱和因子的奇异系统的鲁棒保性能控制问题,利用线性矩阵不等式(LMI)方法巧妙地设计出状态反馈控制器,并给出了系统的鲁棒控制器和保性能控制器存在的充分条件.
[1]Yu L,Chu J.An LMI approach to guaranteed cost control of 1inear uncertain time-delay systems[J].Automatic,1999,35(6):1155-1159.
[2]GAao Z W,Daniel W C H.State/noise estimator for descriptor systems with application to sensor fault diagnosis[J].Submission for IEEE TSP,2006,54(4):1316-1326.
[3]Liang B,Duan G R.Robust H-infinity fault-tolerant conrad for uncertain descriptor system by dynamical compensator[J].Journal of Control Theory and Applications,2004,2(8):288-292.
[4]熊军林,张庆灵.不确定广义系统的最优保性能控制[J].自动化学报,2004,30(4):588-591.
[5]董心壮,张庆灵.具有时变不确定性的广义系统的鲁棒H∞控制[J].东北大学学报(自然科学版),2004,25(2):110-113.
[6]梁家荣,徐宝民,刘永清.具有输入饱和因子的广义系统的镇定[J].自动化学报,1999,25(4):532-536
[7]俞立,鲁棒性——线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
Robust Guaranteed Cost Control for Uncertain Nonlinear Systems with Saturation Actuators
CHENJing,LIJie-kun
(Department of Mathematics and Computer Science,Liuzhou Teachers College,Guangxi 545004,China)
Robust control and guaranteed cost control problems for uncertain nonlinear structured perturbation systems with Saturation Actuators are discussed.The aim is to design a robust controller and a guaranteed cost controller.By means of the linear matrix inequality approach(LMI),sufficient conditions for existence of robust controller and guaranteed cost controller are presented.When these LMIs are feasible,explicit expressions of robust controller and guaranteed cost controllers are obtained respectively.
uncertain singular systems;robust control;guaranteed cost control;LMI approach
TP13
A
1672-1454(2012)04-0054-05
2009-09-22
柳州师范高等专科学校科研重点资助项目(LSZ2011A002);国家自然科学基金项目(11161029)