一种基于网络中心战的航迹融合合成方法
2012-10-20巴宏欣何心怡
巴宏欣,何心怡,蒋 嵘
(1.空军指挥学院,北京100097;2.海军装备研究院,北京100161;3.后勤指挥学院,北京100858)
0 引言
在网络中心战环境下,网络是由空间上分散的平台组成,要求其整体探测范围为各平台传感器探测范围之和才能充分发挥网络中心战的作战效果。传统的数据融合系统,无论是雷达情报组网系统,还是平台上多传感器融合系统,为得到目标的系统融合航迹,一般要求各传感器在空间上的观测区是重叠的[1]。而在网络中心战环境下,必须考虑各平台传感器之间在探测空间完全独立的情况,需要对不同探测区的目标航迹进行接续来实现对目标的接力跟踪,因此传统的数据融合方法应考虑如何在网络中心战的环境下应用。此外,即使各平台传感器的探测区重叠,但由于恶劣的作战环境 (如敌方电子对抗干扰、外部大气环境条件等)、传感器存在探测盲区、传感器故障等原因,会导致某个或某几个传感器对目标的观测存在盲区或航迹缺失的情况发生,此时需要使用网络内其他传感器的数据填补空白,来生成全局稳定的航迹[2]。
在网络中心战中,单一合成空情态势主要依靠雷达对目标的探测数据生成的,其他传感器数据为辅助。所以本文以雷达为例进行研究,其他传感器的数据融合处理可依此类推。
1 基于网络中心战的航迹融合合成方法的基本框架
在网络中心战环境下,由各个平台雷达组成的雷达探测网中,探测数据之间的关系,可从探测区的角度作如下划分 (见图1):
1)各雷达公共探测区内的探测数据。图1中公共探测区为雷达A与雷达B探测区的交集,为雷达A和雷达B对目标的共同跟踪区域。
2)各雷达非公共探测区的探测数据。图1中非公共探测区为雷达A与雷达B探测区的交集之外的区域,为雷达A或雷达B对目标的独立跟踪区域。
3)各雷达独立探测区内的探测数据。图1中独立探测区为雷达C的探测区,与其他雷达的探测区相互独立,无任何交集。
根据以上划分,传感器对目标探测数据的输出情况有如下3种:
1)情况1,分析公共探测区内的探测数据,可以划分为:①各雷达在相同的探测区内,且目标点皆可探测。这种情况是最理想的状况。②各雷达在相同的探测区内,但由于某种原因,使得某个或某几个雷达对目标的观测只能得到部分探测信息或处于盲区。这种情况是最常见的。此时需要采用其他雷达的观测数据填补空白。③各雷达在相同的探测区内,目标点皆未探测到。这种情况是最恶劣的。

图1 雷达探测区之间的关系Fig.1 The relationship of radar detection coverage
2)情况2,分析非公共探测区的探测数据,可以看出,该部分数据为单个雷达独立对目标的跟踪数据,可以视为“情况1”的特例。
3)情况3,分析独立探测区的数据,如雷达C的探测数据,如果要形成连续的目标航迹,则需要与之前的雷达探测数据所形成的目标航迹进行航迹接续,才能完成对目标的接力跟踪。
每个作战平台的本地传感器采用自己的探测数据进行初始化、航迹起始和关联滤波来跟踪目标,经本地传感器跟踪器确定属于有效航迹的关联测量报告(AssociatedMeasurement Report,AMR)和非关联测量报告 (可能是新目标)以及创建新航迹报告,由P2P对等通信网络传送到其他作战平台。
在本作战平台的融合中心,首先将所有测量报告数据进行时间对准和坐标变换,使其具有公共的时空坐标系。再根据变换后的各数据之间的位置关系,判断其是否处于独立探测区。如不处于独立探测区,则用本文提出的方法进行航迹的融合/互补/延续,以实现对目标的融合/互补/独立跟踪;如果处于独立探测区,则需要对不同探测区内的目标航迹进行接续,以实现对目标的接力跟踪。图2为基于网络中心战的航迹融合合成的基本框架。

图2 基于网络中心战的航迹融合合成的基本框架Fig.2 The basic frame of track fusion&combination based on NCW
2 基于网络中心战的航迹融合合成算法
针对图2中基于网络中心战的航迹融合与合成的基本框架,本文提出了各平台传感器探测区域重叠时,航迹的融合与合成基本算法。该算法涵盖了各平台传感器输出完整航迹和航迹缺失的情况,将航迹融合与互补跟踪纳入统一的融合框架内。而传感器在非重叠区域对目标的跟踪,可以视其为一个特例情况,不再另行研究。
数学建模及具体的算法描述如下:
有n个传感器部署在不同作战平台,对同一目标进行观测,设k时刻第i个传感器的关联测量报告AMR为zi(k),则该传感器的观测方程为


第1步:建立估计值的表达式


第2步,求加权系数。估计误差方差为

设指标函数为

求指标函数的极值,得

此时,估计误差的方差为

该方法使估计误差方差最小,为最小方差估计。由此所求得的融合观测值最接近目标点的真值,即

上述情况是最理想的情况,即k时刻不同作战平台上的n个传感器都检测到目标点,并将关联测量报告AMR实时传输到各平台的融合中心,此时可实现航迹融合。但实际情况更多的是在k时刻,因为某些原因 (如某1个或几个传感器受到干扰、遇到坏天气或故障等原因),n个传感器中只有部分传感器能检测到目标,在此情况下,一部分作战平台需采用其他作战平台传感器的AMR数据来实现航迹互补,此时,式(7)将改写为

其中Ai(k)为开关函数,有

于是,wi(k)也成为时变函数,有
估计误差协方差为

可见,wi(k)是随着输出有效数据的传感器数量变化而变化的,并且式(8)涵盖了航迹重合和航迹互补的2种情况。
极端情况是没有任何传感器检测到目标,此时,不宜用式(8)来求取Z^(k),则各平台的融合中心可采用其系统航迹的预测值来做目标状态更新。
第3步,滤波跟踪。使用Z^(k)对融合中心的系统航迹进行目标状态更新,其卡尔曼滤波方程 (即线性最小方差递推估值公式)为:

3 仿真试验
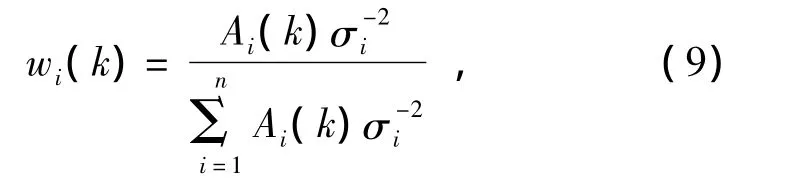
设有配置在不同作战平台上的A和B两部雷达,组网协同跟踪1个目标。2部雷达同步采样,采样周期为T=1 s,假设x轴和y轴的位置测量是不相关的。观测噪声误差协方差皆为σ2=(100 m)2。由作战平台的融合中心完成空间和时间的配准,跟踪滤波在直角坐标系中完成。目标的飞行速度是850 m/s,跟踪时间T=60 s。其中雷达A观测到目标的飞行时间是0~15 s和35~60 s,其中16~34 s由于受到干扰而对目标失跟;雷达B观测目标的飞行时间是0~33 s和50~60 s,其中34~49 s因回波强度不够而无法探测到目标。
图3为雷达A对目标的探测数据 (测量关联报告),图4为雷达B对目标的探测数据 (测量关联报告)。图5为系统对雷达A与B的探测数据的融合合成结果。可以看出,若只有单个雷达观测时,会出现大段航迹缺失的现象,无法完成对目标的持续跟踪。但若将A、B两部雷达的航迹进行互补融合处理,则可以实现对目标的持续跟踪。
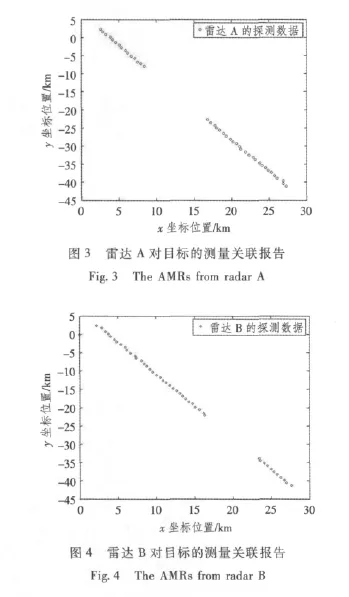

图5 融合合成后形成的互补目标航迹Fig.5 The complementary track after fused and combined
4 结语
本文在研究网络中心战和传统的信息融合方法技术的基础上,提出适用于网络中心战航迹融合合成的基本框架及其基本算法。理论分析和仿真试验结果表明,本文提出的算法可较好地实现网络中心战环境下对目标的持续跟踪,在航迹缺失的情况下实现航迹互补,非缺失的情况下提高了航迹的融合精度。
[1]宗华,宗成阁,朱荣花,等.一种基于协同作战能力的航迹合成方法[J].系统工程与电子技术,2007,29(11):1842-1846 ZONG Hua,ZONG Cheng-ge,ZHU Rong-hua,et al.Composite tracking approach based on the cooperative engagementcapability[J].SystemsEngineering and Electronics,2007,29(11):1842-1846.
[2]权太范.目标跟踪新理论与技术[M].北京:国防工业出版社,2009.
