IGPS发射器角度校准中同轴调整方法研究✳
2012-10-09马骊群孙安斌
李 倩,马骊群,孙安斌
(1.北京航空航天大学仪器科学与光电工程学,北京 100191;2.中航工业北京长城计量测试技术研究所,北京 100095)
IGPS测量网是由两个或两个以上发射器组成的测量网,通过测量被测点与 IGPS发射器之间的方位角和俯仰角,且已知两个发射头距离的情况下,解算出被测点的位置[1].IGPS测量网是通过测量空间角度实现空间位置测量的装置.在对其角度的校准中,需将 IGPS发射器旋转中心与精密转台旋转中心调整到同轴[2].通过查阅国内外文献知,传统的同轴调整方法为百分表法,将百分表固定在基准轴上,百分表测量头沿调整轴的轴向和径向与测量轴的外轮廓接触,两轴同时沿同一方向旋转并测量,根据轴向和径向跳动调整测量轴与基准轴同轴[3].随着光电技术的发展,一些光电敏感元件如 PSD,光电四象限靶标,CCD等应用到同轴的调整装置中[4],但上述装置还是以待调节轴系的外轮廓径向跳动量作为其轴系径向跳动量进行调整的,因此本文提出了一种不依靠外型尺寸来调整轴系同轴的方法.
1 同轴调整原理及方法
1.1 同轴调整原理
首先从原理上分析同轴调整方法.由于工件的旋转轴是一个虚拟的轴,故不可能将它直接测量出来.对于规则形状的工件,以外型轮廓为基准进行同轴调整.该种方法测量出的轴向和径向跳动量,认为完全是由不同轴引起的,无法将轴自身的圆柱度误差从中分离出来.而对于不规则形状的工件,需要创建一个不变的基准,将其不规则外型转换成一个虚拟的规则外形,以规则外形为基准进行测量,该方法消除了测量原理误差.
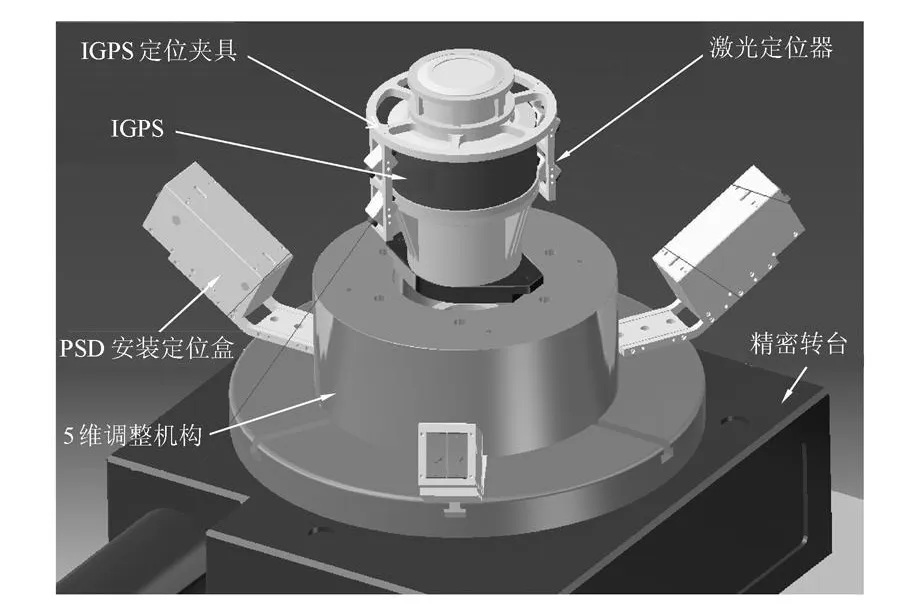
图1 同轴调整原理示意图Fig.1 Schematic diagram of the coaxial adjustment device
由上述调整原理,设计出了如图1所示的同轴调整原理图.首先将 6支 PSD分高低两层安装在以精密转台旋转轴为中心的同心圆上,保证此时 PSD初始零位点组成的圆为以转台旋转中心为圆心的同心圆上,并将此作为基准进行同轴调整.其次将激光器固定在 IGPS发射器旋转头外侧,当激光器与 IGPS发射器一起旋转时,激光器扫出的光束形成以发射器转动中心为圆心的同心圆,利用 6支 PSD对激光光束位置进行测量,根据测量结果确定两轴的相互位置关系.空间中两轴同轴调整过程:即将两条异面直线调整到同一条直线上.分为两个步骤,首先将两条异面直线调整成为同一平面内的两条平行线,其次将两条平行线调整到一个交点上,则两条直线重合.因此,同轴调整的过程,分为两轴平行调整和两轴同心调整.
1.2 轴向平行调整方法
同轴调整可根据高低两层 PSD输出的相对位置关系进行调整,如果两轴处于平行状态,则同组的两层 PSD间的相对位置是相同的.图2(a)为倾斜状态下的 IGPS发射器扫出的大小两个同心圆,将两圆投影到 XOY平面(转台平面),形成如图2(b)所示的两个非同心近似圆形的椭圆.
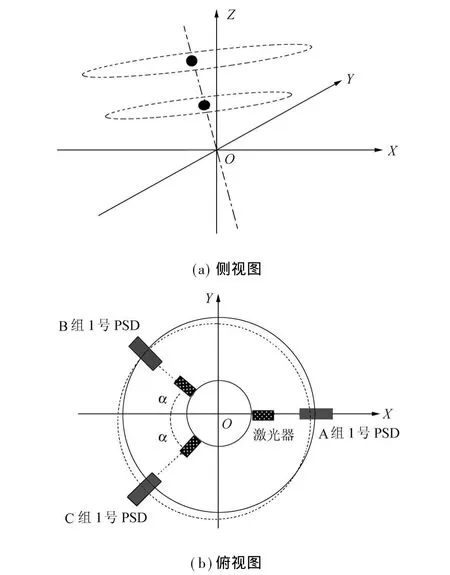
图2 轴向平行调整示意图Fig.2 Schematic of axial parallel adjustment
调整 IGPS发射器的俯仰,当倾斜程度减小到直至两轴平行时,得到两个同心圆.将发射器旋转头旋转一周,6路 PSD分别会显示一个数值.例如 A组 PSD的读数分别为 A1,A2,则ΔA=A2-A1;同理分别计算ΔB,ΔC,找出其中变化的最大点和最小点,例如最大为ΔA,最小为ΔC,根据调整公式(1)和(2),分别调节 A向和 C向高低调节装置,调整完之后,将激光发射器分别对准A,B,C向,再次计算 ΔA,ΔB,ΔC;直到调整到ΔA=ΔB=ΔC相等为止.

1.3 轴向同心调整方法
轴向同心调整是根据单层 PSD输出位置与原始零位的相互关系进行调整的,如果两轴处于同心位置,则 3支 PSD输出的相互关系是相同的.如图3所示,实线圆为 PSD原始零位组成的圆,虚线圆为不同心状态下激光器扫出的圆,将两轴调节同心后,实线圆与虚线圆为同心圆.将 3组PSD分别编号为 A,B,C三组,其中上面一层的PSD编号为 1,下面一层的编号为 2.激光束扫过上层 3支 PSD,偏心状态下对应的读数分别为,,;PSD原始安装同心时第一组 PSD的输出为 A o1,B o1,C o1,则有ΔA=-Ao1;同理可计
算出 ΔB,ΔC;根据公式(3)和 (4)计算出偏移量ΔX,ΔY;沿图2(b)所示的 X,Y的反方向进行调整,当ΔA=ΔB=ΔC时两轴处于同心状态.

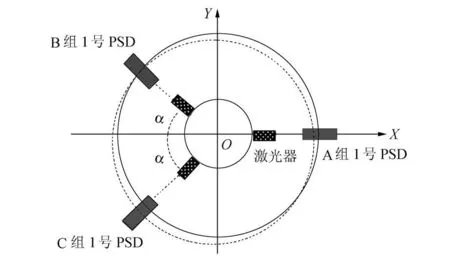
图3 同心调整原理图Fig.3 Principle diagram of concentric adjustment
该同心和同轴的调整过程是一个相互影响的过程,同心调整时会影响到同轴调整的结果,同轴调整的结果同样也会作用到同心调整上,整个调整过程是一个步步逼近同轴状态的过程,需要进行同心与同轴的反复调整,才能达到同轴调整的理想状态.
2 系统误差分析
该系统中,主要误差源有沿 PSD测量方向机械安装定位误差;PSD测量时由于杂散光干扰、信号处理模块不稳定、电源不稳定、漏电流、温漂等原因综合产生的 PSD测量误差;PSD补偿计算带来的误差;整个调整过程实验环境扰动带来的误差.
2.1 PSD安装定位误差
PSD准确安装定位由两部分机械结构保证,一部分为精密旋转轴,它是由一根高精密轴通过与转台中心的孔精密配合将转台旋转中心引出,然后采用两个角接触轴承施加预紧力来保证轴外圈的旋转轴线与内部芯轴轴线重合,从而保证与精密转台旋转轴线重合.将激光器固定在精密旋转轴的外侧,并随其一起转动,以此时激光束位置为基准,将 PSD安装在等高的位置.另一部分为 PSD安装盒,PSD安装盒通过高精度的定位孔,确定 PSD的安装位置,保证将高低两层 PSD安装在与水平面倾斜 30°的平面上.PSD的安装过程如图4所示,最终经补偿后的 PSD安装精度e1=0.002 mm.
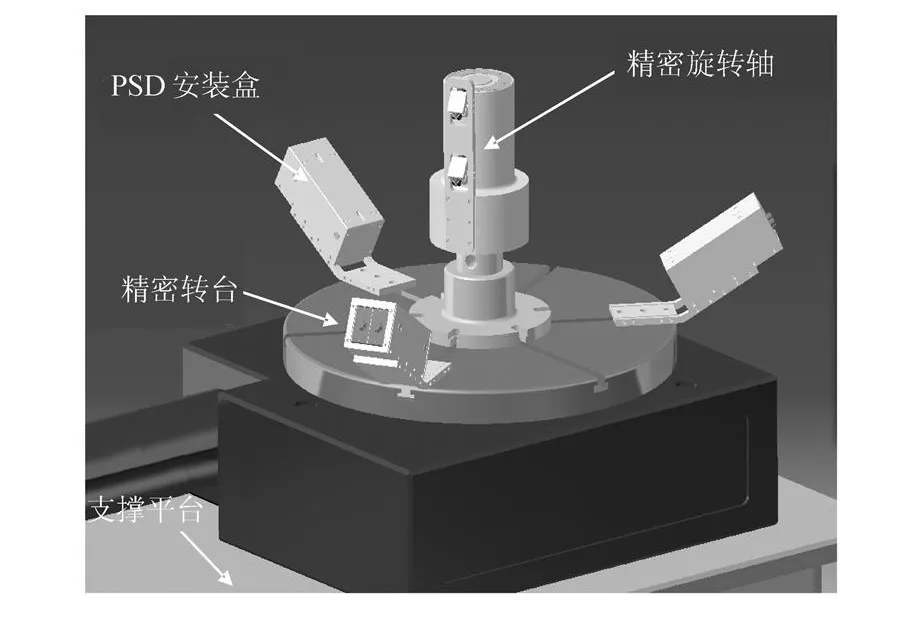
图4 PSD盒安装定位图Fig.4 Sketch map of PSDinstallation boxes machining
2.2 PSD补偿与测量误差
一维 PSD使用过程中,由于 PSD的光敏感区域宽度仅为 1 mm,应保证光斑小而且能量集中.首先,给激光器安装一个h=0.8 mm的孔径光阑,光源与 PSD距离在 400~ 500 mm范围内;经光阑衍射后的艾里光斑直径小于 1 mm,第一亮条纹光斑直径大于 1 mm,可以保证只有爱里光斑入射在 PSD光敏感区域上.其次,为了保证光斑能量中心与几何中心重合,应尽量保证激光束沿垂直方向入射在 PSD上[6].
在 20±0.5℃环境中,入射光波长为 650 nm的条件下对 PSD±5 mm内的输出进行标定.图5为未经补偿的位置误差分布.图5中数据表明:在±5 mm的量程范围内,位置误差小于±0.025 mm,并且误差大小与光斑位置呈线性变化,离原点距离越近误差越小.这说明,一维 PSD与一维移动平台之间存在微小夹角,导致 PSD的输出值按一定比例小于实际移动数据,采用线性补偿的方法来消除微小夹角带来的误差.
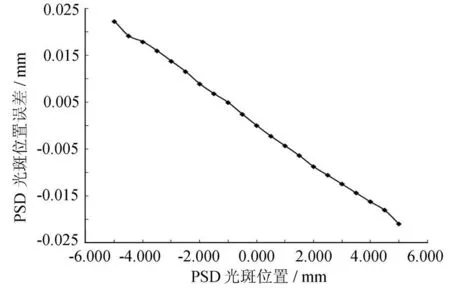
图5 PSD测量误差Fig.5 PSD measurement error

图6 PSD线性补偿后测量误差Fig.6 PSD measurement er ror after linear compensation
图6是线性补偿后的位置误差分布图,观察经线性补偿后的数据,误差分布规律性已不明显.PSD是一种基于 P-N结的横向光电效应器件,由于电阻率分布不均、漏电流、电源不稳定等因素导致 PSD输出特性受影响.这种误差规律变化性较差,采用多项式拟合或者三角函数拟合不能达到理想效果.考虑到由于上述原因导致的误差不会发生突变,其变化趋势在较小的区间内是按一定规律缓慢变化的,因此采用分段拟合的方法对其进行补偿,在满足补偿精度和已有实验设备的条件下选择适当的步距.首先,需要对上述方法的合理性做验证.以 0.25 mm为步距读取 PSD输出值.取出实验数据中以 0.5 mm为间隔的数据,将两相邻数据相加取平均求出中间点数据,并将该数据与测量数据相比较.如图7所示,实曲线为实际测量数据,虚曲线为分段线性拟合数据.由图可知,拟合数据与实测数据的变化趋势一致,且在 0.5 mm范围内误差变化趋势已经趋于缓慢,用 0.5 mm以内的小区域内数据进行线性拟合,可以实现补偿误差在 0.001 mm以下的精度,因此 PSD的补偿误差e 2=0.001 mm.
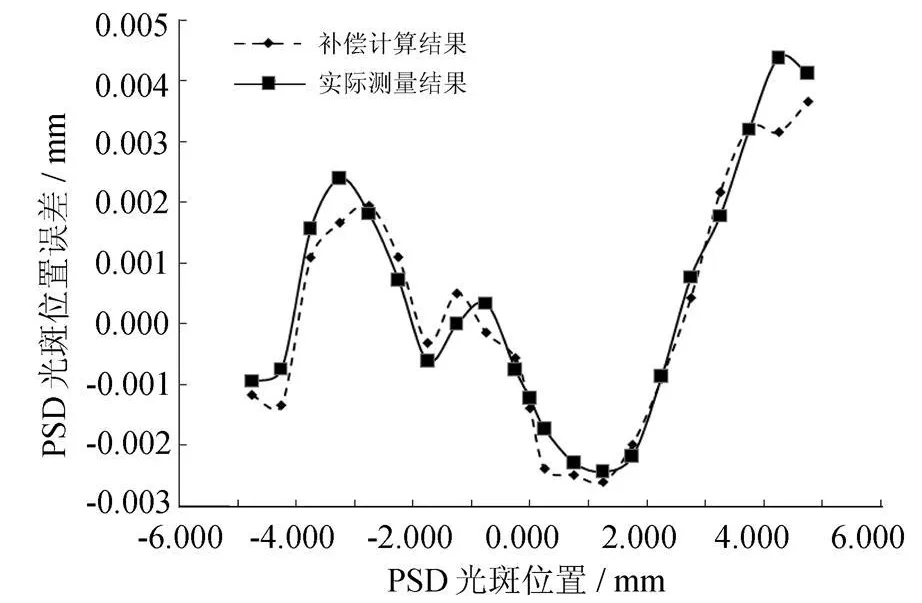
图7 非线性补偿中的理论数据与实验数据分布图Fig.7 M easurement data and calculation data for nonlinear compensation
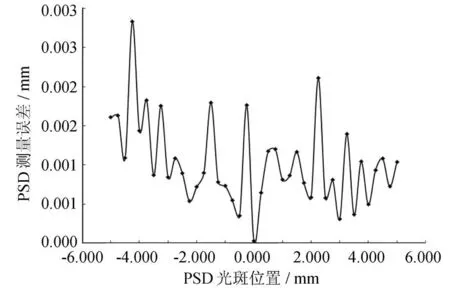
图8 PSD标定误差Fig.8 PSDcalibration error
对于 PSD的测量误差,需要在较长的时间内对其测量的重复作出评定.在实验室环境温度为20±0.5℃ 环境中,经过 4 h,8次实验,对 PSD的重复性进行验证.最后用均方差来评定计算PSD的测量误差,PSD的测量误差如图8所示分布.此时的测量误差是信号处理模块、电源、杂散光、环境温度等多项指标影响的综合结果.最终PSD的测量误差e3=0.003 mm.
在整个装置的调整过程中,IGPS发射器旋转头的轻微晃动,以及实验室环境中的不稳定性给同轴调整带来的误差,反映到 PSD测量方向上,由环境扰动带来的误差e 4=0.002 mm.
2.3 误差合成
3 结 论
本文设计的同轴调整装置,机械结构简单,使用方便灵活,利用一维 PSD将可自行旋转的不规则工件转轴与已知轴调整到同轴的状态.装置中采用上下双层 PSD,保证了两转轴在高低位置时均同心,避免了两轴在某一截面上处于同心位置,实际上两轴线却处于交叉的情况.该装置搭建好之后,不仅可以对 IGPS发射器的角度测量能进行校准,还可以对测头可自行旋转的设备进行测角能力的评定,例如激光跟踪仪、雷达等.装置可以实现直径h≤400 mm,高度 200 mm≤h≤800 mm设备的调整,而且对于高度较高的设备,调整的精度会相应地提高.
[1]Hedges T M,Takagi H.Position measurement system and method using cone math calibration[J].United States Patent US,2003,6:535.
[2]Muelaner J E.Study of the uncertainty of angle measurement for a rotary-laser automatic theodolite(R-LAT)[J].IMech E,2009,223(1):100-102.
[3]韩军海.CCD技术在非接触式角度测量中的应用[J].中国造船,2003,44(4):99-100.Han Junhai.Application of CCD technology in noncontact angle measurement[J].China Shipbuilding,2003,44(4):99-100.(in Chinese)
[4]范安全,杜丽琼.转动设备同轴度测量原理和应用[J].安装 ,2008,32(1):12-13.Fan Anquan,Du Liqun. Rotating device coaxial adjustment measurement principleand application[J].Installion,2008,32(1):12-13.(in Chinese)
[5]王占强.一维 PSD调理电路及其应用[J].仪表技术与传感器,1997(12):25-28.Wang Zhanqiang.Onedimesion PSDsignal processing circuits and its applications [J]. Instrument Technology and Sensior, 1997(12): 25-28. (in Chinese)
[6]吕爱民.光斑模式对 PSD定位的研究 [J].激光技术,1998,22(5):294-295.Lu Aimin.The research in Theinfluence of beam spot on the precision of PSD[J].Laser Technology,1998,22(5):294-296.(in Chinese)
[7]李庆祥,王东生 ,李玉和.现代精密仪器设计[M].北京:清华大学出版社,2004.
[8]张永德.PSD用于空间角度测量的研究[J].中北大学学报,2005,26(6):436-438.Zhang Yongde.Research on space angle measurement based on PSD[J]. Journal of North University of China,2005,26(6):436-438.(in Chinese)
[9]Robert Schmitt.Performance evaluation of IGPS for industrial applications[C].International Conference on Indoor Positioning and Indoor Navigation(IPIN),2010:15-17.
[10]Indoor GPStechnology for metrology.http://www.metris.com,2000-05/2010-05.
[11]Muelaner JE,Wang Z.Estimation of uncertainty in three-dimensionalcoordinate measurement by comparison with calibrated points[J].Measurement Science and Technology,2010,21:25-50.
[12]苏成志.用 PSD进行轴系校准检测 [J].长春理工大学学报,2003,26(1):61-62.Sun Chengzhi.The shaf ting correction and detection with PSD[J].Journal of Changchun University of Science and Technology,2003,26(1): 61-62.(in Chinese)
[13]周正华.PSD及其集成装置标定实验研究[J].电子测量与仪器学报,2000,14(4):27-30.Zhou Zhenghua. Research on calibration on experiment of PSD and its integrated setup[J].Journal of Electronic Measurement and Instrument,2000,14(4):27-30.(in Chincse)
[14]李广云,李宗春.工业测量系统原理与应用[M].北京:测绘出版社,2011.
[15]钟伟.安装工程中同轴度测量方法探讨 [J].安装,2007(11):23-25.Zhong Wei.Method analyzefor coaxial measurement in installation project[J].Installation,2007(11):23-25.(in Chinese)
