直线输出七杆机构的构型设计✳
2012-10-09武建德刘伟杰李瑞琴吕波长赵晓东
武建德,刘伟杰,李瑞琴,吕波长,赵晓东
(中北大学 机械工程与自动化学院 ,山西 太原 030051)
0 引 言
随着现代科技的飞速发展,工业机器人、宇航技术、医疗器械、海洋资源开发等技术得到了快速的发展,同时对机构学也提出了更高的要求,诸如高精度、高速度、高承载能力、高稳定性等诸多要求.现代机构更需要智能化、柔性化的输出特性.对混合驱动机构的柔性输出的迫切需求,促进了人们对机构的创意设计设想.
直线输出七杆机构的研究尚处于初级阶段,但是相比凸轮机构的直线输出具有很大的优势.直线输出混合驱动七杆机构结构简单、成本低,可以实现编程控制的需要以及大功率且诸多复杂的运动规律;输出运动的精度比较高,可以实现输出运动的柔性,同时最大限度地降低电机的功能需求.该机构具有广阔的应用前景,可以代替目前凸轮机构直线输出的众多场合.
本文就是根据颜鸿森教授提出的创意设计方法,推导出了一种直线输出的混合驱动七杆机构构型,为直线输出七杆机构的设计理论提供了更广阔的应用前景.
1 颜氏基本设计理论
机构的构型设计在创新设计中有重要的作用,设计者常常面临着改造已有设计以避开专利保护的问题,因此设计者必须努力创造出新的机构或者改变已有的设计,以得到自己期望的机构构型.本文系统地运用一种颜氏创新法[1],来得到符合要求的直线输出七杆机构.
机构的构型拓扑机构一般通过矩阵来表示,目前有多种矩阵来表示机构构型的拓扑机构,包括连杆邻接矩阵、标号邻杆矩阵及缩杆邻接矩阵等.颜氏创新法是通过缩杆邻接矩阵来表示机构的拓扑结构,缩杆邻接矩阵 M CLA中元素的意义如下:

式中:M 1表示多接头杆的构型矩阵,其对角线元素为多接头杆的接头数,非对角线元素为杆 i和杆 j之间的接头数,称为接头元素,其值只能为0,1,2;M 2表示多接头杆与缩杆的邻接关系矩阵;M3是 M2的转置矩阵;M4矩阵的对角线元素表示杆 i具有双接头杆的数目,其值为数目的负数,因为各个缩杆不连接,所以其非对角线元素为零.
进行机构创新设计首先要先找出其缩杆邻接矩阵 M CLA,根据 M CLA得出运动链,然后根据特殊化原则得出我们需要的机构.
2 连杆类配
连杆类配是指该链中杆件的数目类型,连杆类配是一组由接头数目为 2的 N 2,接头数目为 3的 N 3,接头数目为 4的 N 4,…等所组成的数列,表示为 AL= [NL2/NL3/NL4/NL5… ].此步骤相当于得出 ML对角线元素的值.
本文需要得到一种全部由低副组成的二自由度的直线输出七杆机构.首先需要对机构进行一般化,机构的一般化是含连杆和转动副组成的一般化链,通过机构的一般化可得出不同机构的可能共同源.
对于七杆机构,因为考虑的是含转动副接头的平面运动链,所以接头数 NJ可以表示为

式中:FP是自由度数;NL是连杆数.
根据式 (2),可得接头数 NJ为 8,即为一个(7,8)运动链.对于一个具有 NL个连杆和 NJ个接头的运动链的连杆类配 AL= [NL2/NL3/NL4/NL 5… ],可以由以下方程求得

其中:

对于 NL=7和 FP=2的运动链而言,NJ=8的全部连杆类配可通过式 (3)计算得到其全部连杆类配为 [5/2/0],[6/0/1].
3 缩杆类配
对于每一个连杆类配,可找出其缩杆类配ALC,ALC= [NC1/NC2/NC3/NC4… ],其中 NCi是具有 i个双接头的缩杆数目.此步骤相当于求出了M4对角线上元素的值.因为任意两个缩杆类配都不连接,所以其非对角线元素为零,因而求出其对角线元素的值就求得了 M 4矩阵.
将 N L2根双接头杆分割成 NC个部分,而 NC是缩杆的数目,因此缩杆类配 ALC= [NC1/NC2/NC3/… ]必须满足以下方程式:

式中:NC的取值范围为

其中:2Jm=3NL3+4NL4+…+qNq.
式中:Nm是多接头杆杆数.
由此,可以得到满足式(5)的任意连杆类配的缩杆类配.当 AL=[5/2/0]时,则根据式(5)~(7)的约束可以得到相应的缩杆类配为 [1/2],[0/1/1].则缩杆邻接矩阵MCLA的对角线元素的值可以由大到小地获得,根据其意义可得缩杆邻接矩阵 M CLA中的对角线元素值的序列为(3,3,-2,-2,-1),由大到小分别对应的杆标号为L1,L2,L3,L4,L5.
4 构造多接头杆构型矩阵 M1
对于多接头杆的构型矩阵 M1,对角线元素的值已在前面获得.为求出其非对角线元素的值,需找出多接头杆之间的所有可能的附随接头序列,也就是找出所有多副杆 i和其他多副杆之间的附随运动副数目,相当于将整数 2Jd=2Jm-2N c分割成 k部分,再分配给运动副的各个元素.
针对每一个附随运动副序列,利用排列群得到矩阵 M1的各个非对角线元素的值.首先根据矩阵 M1的对角线元素的值求得其运动副排列群,然后对运动副元素分配值,就可以综合得出不同的M 1矩阵,矩阵 M 1中第 i列非对角线元素之和 ai为

式 (8)为矩阵 M 1的相容性限制.在确定矩阵元素中要满足此相容性限制.
在本文中多接头杆集合 SML=(L 1,L 2),接头数 eii=(3,3),多接头杆附随的接头数 ai=(1,1),则集合连杆群为

其接头群为

其中:

则可以得到矩阵 M1为

5 构造多接头杆与缩杆的邻接关系矩阵M 2
确定矩阵 M2与确定矩阵 M 1的过程类似,也就是将去除多接头杆附随运动副的接头数分配给矩阵 M2中的元素.元素值可能为 0,1,2,因此需要分配两次,第一次分配 2给元素,第二次分配 1给元素,而没有分配的元素设置为 0.根据前面得到的值,则目前缩杆连杆矩阵 M CLA为

本文中的 NL=7,ALA= [5/2/0],ALC=[1/2],多副杆的两个排列群 [L1][L2]和[L 1L2],缩杆连杆群有 [L3][L4][L5],[L3][L 4L5],则集合连杆群为


集合接头群为


因此,可以获得三个 M2矩阵,分别为
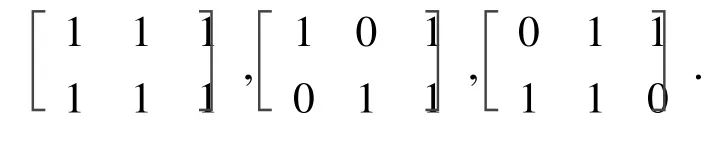
6 缩杆邻接矩阵和运动链图谱
由前面所得到的矩阵 M1,M2,M 3,M 4组成相应的缩杆邻接矩阵 M CLA,去除退化运动链等不合格的链,则最后得到的缩杆邻接矩阵 MCLA为

去除呆链,根据缩杆邻接矩阵 M CLA得到运动链图谱,如图1所示.

图1 基本运动链图谱Fig.1 Atlas of basic kinematic chain
图1中得到的这三个基本运动链图谱,就是需推导的七杆机构的基本形式.需求的直线输出七杆机构将从这三个基本运动链图谱中得到.
7 新机构构型设计
根据设计需求,由缩杆邻接矩阵和基本运动链图谱可得到新的机构构型,此过程称为特殊化,即在一般化链中指定各个运动副的类型、驱动条件、输出条件等.本文中,需要得到一种二自由度混合驱动七杆机构,且输出运动为直线移动.首先确定机架,并且移动输出构件与机架相连,根据特定化条件,所有运动副均为低副(包括转动副和移动副),加入机架和移动副;然后再加上两个驱动条件(原动件由常速电机和伺服电机共同驱动 )(机架用 K表示,移动输出构件用 P表示),并且移动输出构件不与驱动构件相连,则得到的符合要求的运动链只有图2所示的 5种形式.

图2 符合要求的运动链图谱Fig.2 Atlas of kinematic chain which can meet requirements
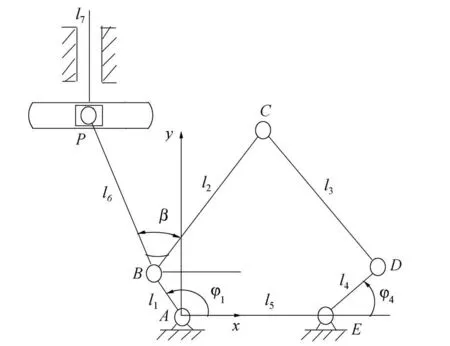
图3 直线输出七杆机构Fig.3 Seven-bar mechanisms with the translation-output

图4 特殊化链图谱Fig.4 Specialied atlas of kinematic chain
图2所示的基本运动链图谱中,移动副与机架 K相连,则机架 K的另外两个接头为驱动电机,另外一个三接头杆为连杆,不能与驱动电机直接相连,排除图2(a)与图2(b);在图2(d)中,移动副和三接头杆直接相连,不能保持其稳定的任意直线输出规律功能;图2(e)中,三接头连杆直接与两个驱动电机相连,一个构件连接两个驱动,不符合要求.由此,只有运动链图谱 2(c)符合需求,图2(c)三接头连杆一个接头与驱动电机相连,另一个接头通过一个二接头杆与移动副相连,第三个接头通过一个二接头杆和驱动电机相连,转换成的机构模型如图3所示.其所对应的可行的满足条件的特殊化链图谱如图4所示(R代表转动副,P代表移动副).如果改变特定化条件或者对条件的约束减弱,可以得到很多种不同的运动链形式,大大促进了机构构型的创新性.
8 结束语
设计者可以通过本文推导的形式得到符合任何要求的全部机构构型图谱,并且在设计过程中具有很大的柔性,可以根据不同的需求来改变约束条件而得到相应的机构构型.通过运动链的一般化、特定化得到了符合需求的直线输出七杆机构,拓展了直线输出七杆机构的设计空间,并为其应用研究奠定了良好的基础.
本文得到的直线输出七杆机构可以在不改变机构模型的情况下,通过改变伺服电机的驱动规律得到不同行程、不同运动规律的直线输出运动,充分体现了混合驱动机构的输出柔性及其可控性,满足当代对现代机构的需求.
[1]颜鸿森.机械装置的创意性设计 [M].北京:机械工业出版社,2002.
[2]邹慧君.对设计的内涵、作用和方法的思考 [J].机械设计与研究,2010,26(1):7-14.Zou Huijun.Deeply thinking on the intension,affect and method for design[J].Machine Design and Research,2010,26(1):7-14.(in Chinese)
[3]Li R Q,Dai J S.Workspace atlas and analysis of seven-bar mechanisms with the translation-output[J].Mechanism and Machine Theory,2012,47(1):117-134.
[4]李瑞琴,张治民.可控七杆机构的直线输出行程规律分析[J].机械设计与研究,2008,24(1):25-31.Li Ruiqin, Zhang Zhimin. Workspace atlas of controlled seven-bar mechanism[J].Mechanism and Machine Theory,2008,24(1):25-31.(in Chinese)
[5]张阁.实现变凸轮曲线的混合驱动七杆机构设计理论及应用研究[D].上海:上海交通大学,2002.
[6]邹慧君.创新始于设计设计推动深入的自主创新[J].机械设计与研究,2011,27(2):1-7.Zou Huijun.Theinnovation beginning f rom design the design push forwarding the in itiative-innovation and the methodology of realization[J].Mechanism and Machine Theory,2011,27(2):1-7.(in Chinese)
[7]颜鸿森.颜氏创造性机构设计 [J].机械设计,1995(10):39-41.Yan Hongsen. Yan′s creative mechanism design methodology[J].Machine Design,1995(10):39-41.(in Chinese)
[8]Vaddi S S, Seth B. Programmable function generators-II: seven-bar translatory-output mechanism[J].Mechanism and Machine Theory,2003,38(4):331-343.
[9]吴舒海,陈文家.二自由度七杆机构链型和拓扑特性研究 [J].农业装备技术,2010,36(2):45-48.Wu Shuhai,Chen Wenjia.Research of chain and topological characteristics of hybrid seven-bar mechanism [J]. Agricultural Equipment &Technology,2010,36(2):45-48.(in Chinese)
[10]王汝慧.混合驱动六杆机构的研究 [D].太原:中北大学,2010.
[11]李景洋,葛正浩,苏鹏刚,等.混合驱动凸轮连杆机械压力机的分析与仿真 [J].机械传动,2010(10):50-54.Li Jingyang,Ge Zhenghao,Su Penggang,et al.Analysis and simulation of hybrid cam-linkage mechanical press [J]. Journal of Mechanical Transmission,2010(10):50-54.(in Chinese)
[12]张凡,王子文,李建功.基于逆运动学分析的混合驱动机构的优化综合 [J].河北理工大学学报(自然科学版),2009,31(3):68-73.Zhang Fan,Wang Ziwen,Li Jiangong.Optimum generation of hybrid-driven machine based on converse kinematics analysis[J]. Journal of Hebei Polytechnic University (Natural Science Edition,2009,31(3):68-73.(in Chinese)
[13]腾启,宋可总,王红岩.机械创新设计的研究[J].锻压机械,2002(3):6-8.Teng Qi,Song Kezong,Wang Hongyan.Work on innovative design of machinery[J]. Metalforming Machinery,2002(3):6-8.(in Chinese)
[14]邹慧君,颜鸿森.机械创新设计理论与方法[M].北京:高等教育出版社,2008.
[15]张晓玲,沈韶华.实用机构设计与分析 [M].北京:北京航空航天大学出版社,2010.
