基于矩阵整流器的直流调速系统研究
2012-09-22,
,
(天津科技大学 电子信息与自动化学院,天津 300222)
1 引言
矩阵变换器自20世纪70年代提出以来,因其能实现输入到输出的单级变换、无中间直流环节、电流谐波畸变小、输入功率因数可调及能量再生等显著性能[1-2],成为电力电子技术领域研究热点。目前多以交流电机驱动系统为应用背景,且在三相AC/AC变换器方面取得许多实质性成果。由于矩阵变换器是一种任意m相输入到任意n相输出的电力变换装置。因此,在三相AC/AC变换器拓扑结构基础上,去掉一相输出可实现 AC/DC的直接变换[3-4]。本文讨论了基于矩阵结构的可控整流器(矩阵整流器),采用电流空间矢量调制策略,并对变换器的4象限工作原理进行了深入分析。在此基础上提出了基于矩阵整流器驱动的直流调速系统,并对系统的运行性能进行了仿真研究。
2 矩阵整流器工作原理
矩阵整流器拓扑结构如图1所示,由6个双向开关元件组成2×3调制矩阵,三相交流电压输入,一路直流电压输出,通过对6个双向开关元件的逻辑控制可实现对电源电压、频率的直接变换。
如果定义:

则根据基本安全原则,可以得到

由于约束条件的限制,在实际运行中,矩阵整流器共允许存在9种开关状态,见表1。
表1中还列出了每种开关状态下输出电压与输入线电压以及输入相电流与输出电压的对应关系,其中电压、电流各变量及其参考方向定义如图1所示。组别Ⅰ与组别Ⅱ分别表示整流器在第1象限以及第3象限的工作状态。
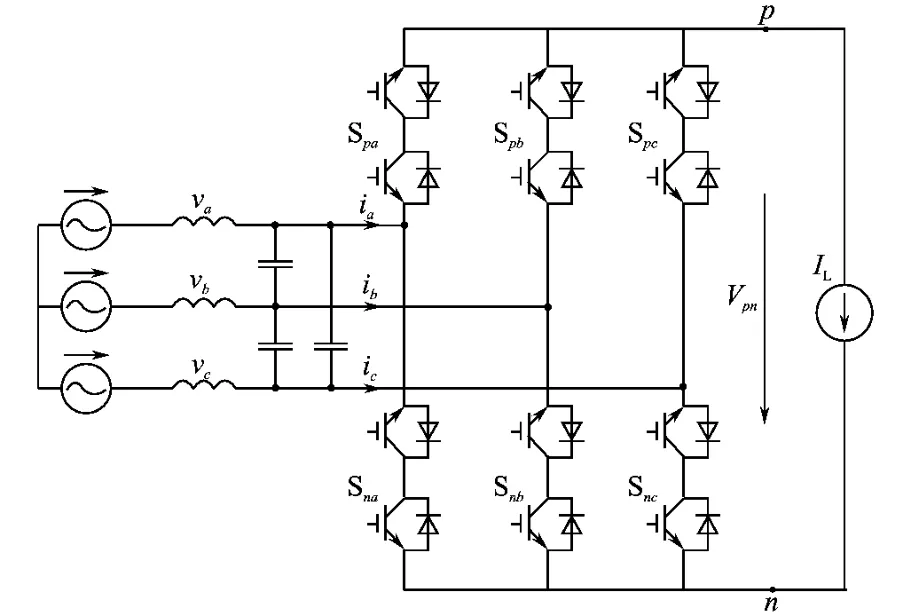
图1 矩阵整流器拓扑结构Fig.1 Topology of matrix rectifier

表1 矩阵整流器开关组合Tab.1 Switch combination of matrix rectifier
根据图1和表1可将变换器的输入相电流ia,ib,ic及整流输出电压Vpn的瞬时值用元件的开关函数表示,即
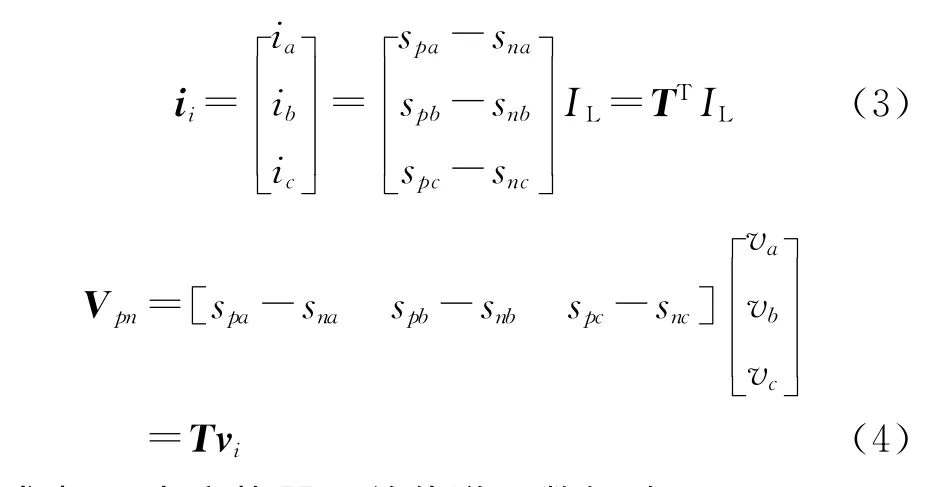
式中:T为变换器开关传递函数矩阵。
由于变换器开关频率远高于输入电压频率,因而可以采用脉宽调制技术得到正弦波形的输入相电流和直流输出电压。
3 电流空间矢量调制
矩阵整流器输入相电流空间矢量调制过程如图2所示。

图2 输入相电流空间矢量调制Fig.2 Space vector modulation of input phase current
根据检测到的输入相电压空间矢量和设定的输入相位差φi,可确定希望得到的输入相电流空间矢量Iref,定义

式中:Iim为输入相电流幅值。
图2a中Ij(j=1,…,6)为有效电流矢量,其模为其他3个为零矢量I0,其对应开关状态如表1所示。
有效电流矢量将空间矢量六边形内切基准矢量圆划分为6个扇区。任意时刻输入相电流空间矢量Iref可由相邻的2个有效电流矢量和1个零矢量合成得到,如图2b所示。相邻矢量作用的占空比可由三角函数运算得到:
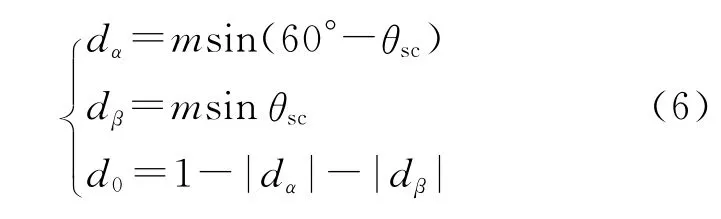
式中:扇区角θsc为空间矢量在当前扇区中的位置,0°≤θsc≤60°;m为变换器的调制度,-1≤m=Iim/IL≤1。
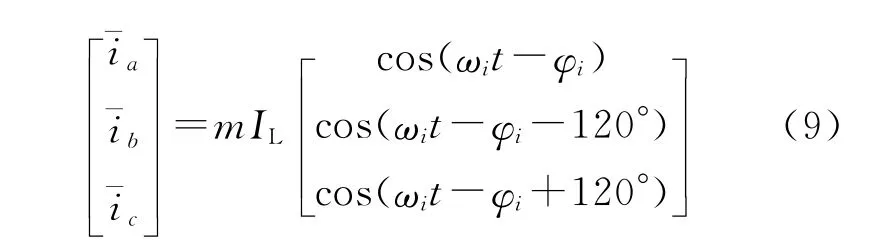
以输入相电流矢量位于第1扇区为例,在单位开关周期内,输入相电流的平均值为

由于输入相电流矢量位于第1扇区,则

将其代入式(7),则
而矩阵整流器输出的直流电压为

式中,Vim为输入相电压幅值。
由式(9)、式(10)可得,采用电流空间矢量调制策略,可将矩阵整流器输入电流调制为正弦波,且功率因数可调;输出电压为直流,当输入功率因数为1,且调制度m=±1时,输出电压最大值为±1.5Vim。
由于变换器使用双向开关,有效电流矢量Ij可由不同开关组合产生,见表1。为此引入角标“+”、“-”表示同一矢量的不同开关组合,且Ij+与Ik-开关状态相同,其中

因此,当调制度m>0时,使用Ij+调制,整流器输出正电压。由于输出电流的大小及方向与负载性质有关,如带电动势负载时,电动势大于整流电压时电流反向,实现能量回馈,整流器工作在1,2象限。同理,当m<0时,由式(6)得负的导通占空比,应使用Ij-进行矢量调制,整流器输出负电压,可工作在3,4象限。
4 基于矩阵整流器的直流调速系统
由矩阵整流器作为功率驱动的直流调速系统如图3所示。为了获得良好的静、动态性能,系统采用转速、电流双闭环结构,调节器均采用带限幅作用的PI调节器。电流调节器输出为矩阵变换器调制度控制信号。空间矢量调制策略单元则根据同步变压器检测到的输入相电压信号、调制度以及功率因数设定值完成输入相电流空间矢量的扇区判断、占空比计算及开关函数合成,最后产生6路PWM驱动信号,从而实现系统的闭环控制。

图3 矩阵整流器直流调速系统结构图Fig.3 Structure block diagram of matrix rectifier with DC speed control system
5 仿真实验分析
根据上述变换器空间矢量调制原理以及图3所示的拓扑结构,利用 Matlab/Simulink仿真软件,建立了基于矩阵整流器的双闭环直流调速系统仿真实验模型,并对系统突加给定启动、正反向切换等动态过程进行了仿真实验研究。
仿真实验使用的电机参数为[5]:额定电压220V,额定电流135A,额定转速1 460r/min,Ce=0.132V·min/r,过载倍数为1.5;电枢回路总电阻R=0.5Ω,电磁时间常数Tl=0.03s,机电时间常数Tm=0.18s。仿真模型中模拟了发电机负载,当转速为额定值时电动机负载电流为100A。
系统突加给定启动,稳定运行后,在t=0.9s时由正向直接切换到反向运行,仿真波形如图4所示。其中,图4从上到下分别为变换器输出电压、调制度以及电机电枢电流、转速波形。可见,电机转速、电枢电流动态响应快,超调小,正反向切换平滑,系统具有良好的动态性能。
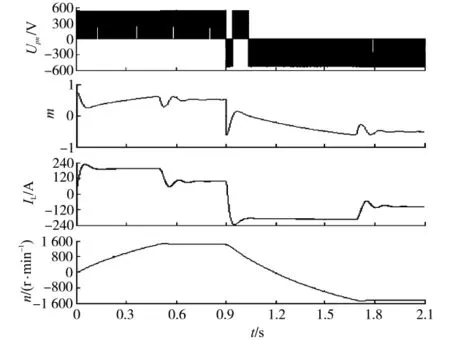
图4 系统启动与正反向切换运行时仿真波形Fig.4 Starting and positive to negative switching simulation waveforms of the system
图5为电机减速过程局部放大图。由输出电压以及电流的对应关系可以看出,在电机减速制动过程中(0.9~1.04s之间),变换器经历了反向逆变、反向整流以及正向逆变等工作过程,其中正向逆变阶段是电机回馈制动的主要阶段。实现了系统的4象限运行。

图5 系统反向制动过程局部图Fig.5 Subdiagram of reverse braking process of the system
图6、图7分别为变换器输入侧相电压、相电流波形,其中图7为变换器增设输入滤波器后的电流及电压波形。可以看出,采用空间矢量调制策略,变换器整流运行时电压与电流同相位,逆变时相位相反,且滤波后的输入电流正弦性好,功率因数高。

图6 变换器输入侧相电压及相电流波形Fig.6 Phase voltage and phase current waveforms of the input side of the converter

图7 滤波后的输入相电流及相电压波形Fig.7 Waverorms of the input phase current and phase voltage after filter
6 结论
仿真实验结果表明,矩阵整流器在输入相电流空间矢量调制策略控制下具有良好的输入、输出特性,且可实现能量的双向流动。将其应用于直流调速系统中可以实现电机的回馈制动及4象限运行,动态性能优于传统的可逆调速系统。仿真实验验证了理论分析的正确性和可行性。可以看出基于直接变换的矩阵整流器,作为一种新型的功率变换器在高性能直流可逆调速系统中具有广泛的应用前景。
[1]Rodriguez J.A New Control Technique for AC-AC Converters[C]∥Proceedings IFAC Control in Power Electrical Drivers Conference,1983:203-208.
[2]Huber L.Space Vector Modulator with Unity Input Powerfactor for Forced Commutated Converters[C]∥IEEE-IAS Annu.Meeting,1991:1032-1041.
[3]Garcia Gil R,Espi J M.Bi-directional Three-phase Rectifier with High-frequency Isolation and Power Factor Correction[C]∥Annual IEEE Power Electronics Specialists Conference,2004.
[4]Garcia Gil R,Espi J M.A Bidirectional and Isolated Threephase Rectifier with Soft Switching Operation[J].IEEE Transactions on Industrial Electronics,2005(52):765-773.
[5]陈伯时.电力拖动自动控制系统[M].第3版.北京:机械工业出版社,2005.
