基于Simulink的电动助力转向控制策略仿真
2012-09-18徐中明王吉全胡康博徐浩轩
徐中明,王吉全,余 烽,胡康博,徐浩轩
(重庆大学 a.机械传动国家重点实验室;b.机械工程学院,重庆 400030)
电动助力转向系统(EPS)具有转向跟随性好、操纵轻便灵活、节能、环保、成本低、市场竞争力强等优势,因而被广泛用于微型轿车和经济性轿车,并逐渐向高级轿车和跑车上发展,成为现代转向系统研究和开发的热点[1-9]。目前国内对EPS的研究偏重于系统动态性能、电动机电流跟随性和单一回正性的改善方面,对助力转矩控制策略的研究相对较少,而且极少涉及不同控制策略之间的转换关系[10]。
本文根据汽车电动助力转向系统性能的要求建立了包括转向系统模型、三自由度汽车模型和轮胎模型在内的汽车转向仿真模型,把控制策略分为助力控制策略、回正控制策略、阻尼控制策略和补偿控制策略,以转向盘检测转矩和转角为基础制定死区控制,并在此基础上设计了不同控制策略的转换关系。针对国内某款轿车的参数进行仿真试验,验证了本文技术的可行性。
1 仿真模型的建立
1.1 EPS数学模型的建立
图1为电动助力转向系统结构示意图,将其分为方向盘与上转向柱、下转向柱与输出轴、齿条和电动机4部分。

图1 电动助力转向系统结构示意图
根据牛顿力学定律,建立EPS的系统动力学方程式:
转向盘与上转向柱

下转向柱与输出轴

式中:Td为驾驶员施加的转矩;θc、θe、θm分别为转向盘、输出轴和电动机的转角;Tsen为转向柱检测转矩;xr为齿条位移,xr=θe×rp;Kr为等效弹簧刚性系数,根据经验公式Kr=29871 N/m;Fr为由回正力矩引起的作用在齿条上的外力;Tw为作用在输出轴上的反作用力矩;Tm为电动机电磁转矩。相关仿真参数见表1。
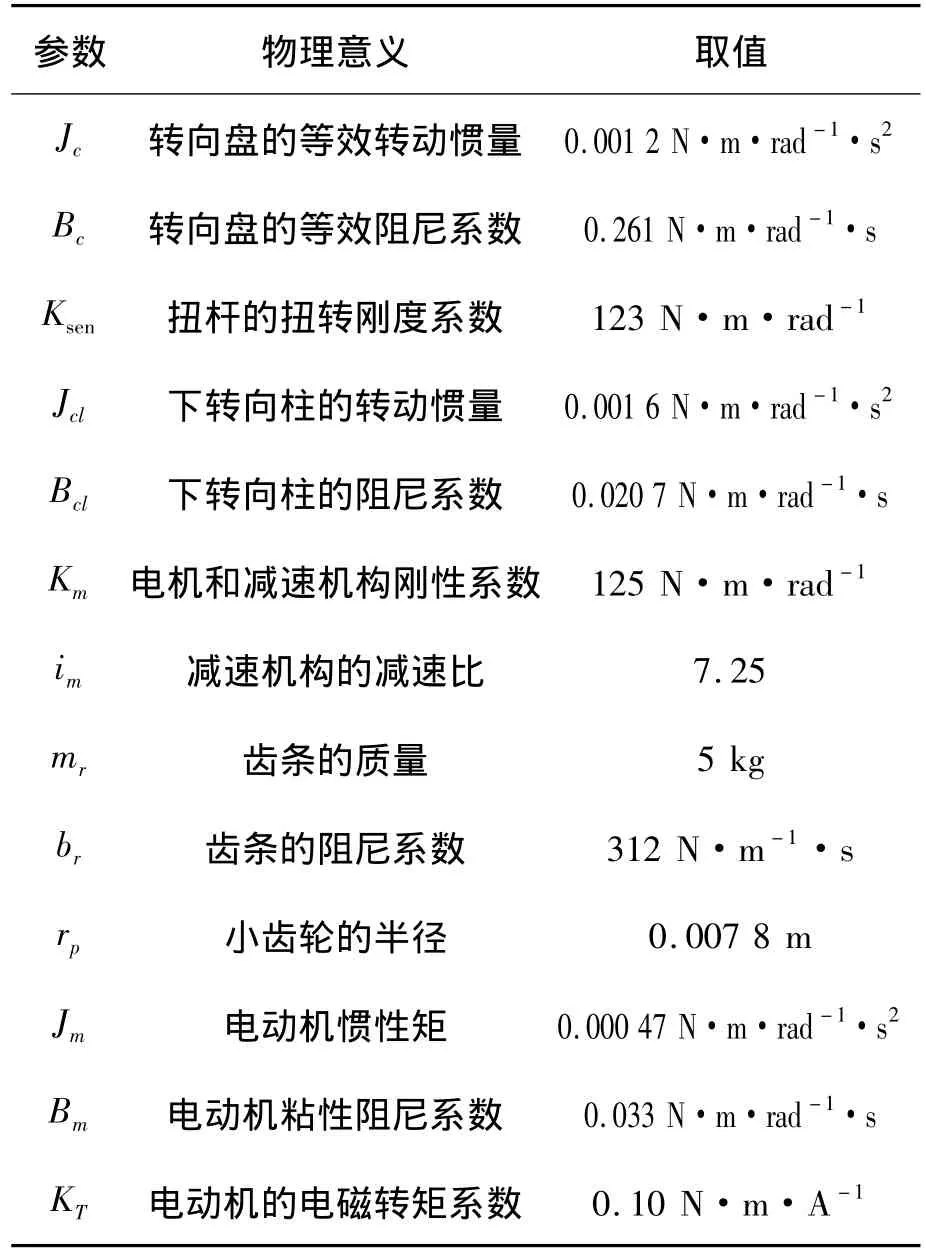
表1 电动助力转向系统模型仿真参数
以方向盘手力、电机助力、轮胎回正力矩为输入,以前轮转角和检测转矩等为输出,根据式(1)~(4),可得到EPS的空间状态方程,即可在Simulink中建立模型。
1.2 整车模型
在二自由度汽车模型的基础上考虑了悬架、轮胎和车身的非线性等影响因素,建立包括侧向、横摆和侧倾的三自由度汽车模型[9],如图2所示。

图2 三自由度汽车模型示意图
假设汽车前进速度不变,左右前轮转角相等,忽略空气动力的影响,根据牛顿力学定律建立以下方程式:

其中:ωr为横摆角速度;φ为车身侧倾角;δ为前轮转角;β为质心侧偏角;R为转弯半径;Fij为四轮侧偏力,是轮胎垂向载荷和侧偏角的函数。相关仿真参数见表2。
以汽车前轮转角和四轮的侧偏力为输入,以横摆角速度、侧向加速度等车身状态参数为输出,根据式(5)~(7)建立Simulink模型。

表2 整车仿真模型参数
1.3 Fiala-桥石轮胎模型
Fiala-桥石轮胎模型是由Fiala在1954年根据简化的轮胎理论模型导出,1961年和1968年日本桥石轮胎厂对理论表达式进行了修正。该模型根据轮胎垂向载荷、印迹长度、αij=0时轮胎侧偏刚度、附着系数得到侧向力和回正力矩相对于侧偏角的函数关系[3]。该模型的表达式为:

其中:Fy为轮胎侧偏力;Ma为回正力矩;α为轮胎侧偏角;φ为无量纲侧偏角,φ=(K·tanα)/(Fz·μ)。相关仿真参数见表3。
根据式(8)~(9)在Matlab的m文件中编写相关程序,然后利用Simulink的S-Function模块,可建立轮胎的模型。
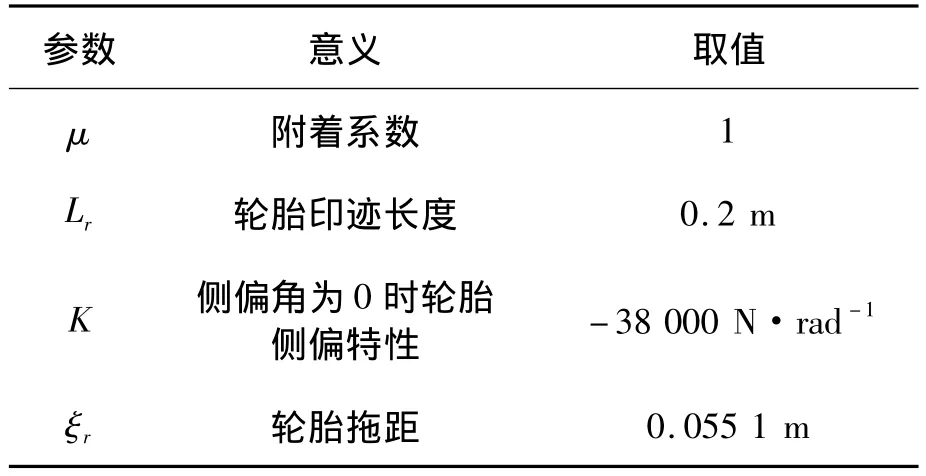
表3 轮胎模型仿真参数
1.4 助力电动机模型
在EPS中采用直流电动机。电动机的端电压U与电感L、电流I、电枢电阻R、反电动势常数Kb和电动机转速θm之间的关系为

其中忽略电机电感,电动机反电动势常数Kb为0.10 V·s·rad-1。
将EPS模型、三自由度整车模型、轮胎模型和电机模型结合起来,建立以转向盘转矩为输入,转向盘转角、横摆角速度、侧向加速度等变量为输出的仿真模型[9],如图3所示。
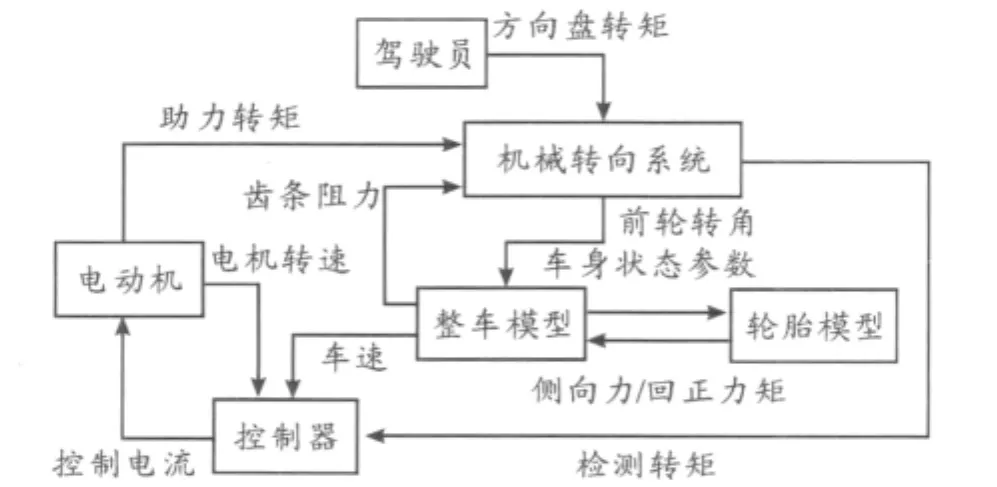
图3 仿真模型示意图
2 控制策略
电动助力转向的核心问题是助力转矩如何随方向盘输入转矩和车速的变化而变化,因此,控制策略成为国内电动助力转向系统研究的核心。控制策略可分为助力控制策略、回正控制策略和阻尼控制策略3 种控制模式[8-13]。
2.1 助力控制策略
助力控制是汽车行驶过程中进行转向时为减小驾驶员操纵方向盘的力矩,把电动机转矩通过减速机构作用到机械转向系统的一种基本控制模式。助力控制不考虑转向时系统的惯性、摩擦、阻尼等,只根据转向盘转矩信号和车速信号从预先制定的助力特性曲线中查找相应的目标电流,然后利用PID控制对目标电流进行跟踪控制。
根据文献[14]中所推荐的路感偏好型函数曲线,对于中级 sedan型轿车,当车速在 10~113 km/h时,具有良好手感的方向盘转矩为2~4.5 N·m。调整特征车速下的车速系数,使该车速下的方向盘操纵力矩与路感偏好型函数曲线所推荐的值一致,制定助力特性曲线,如图4所示。除特征车速外,其余车速下的助力电流由特征车速的电流线性插值得到。
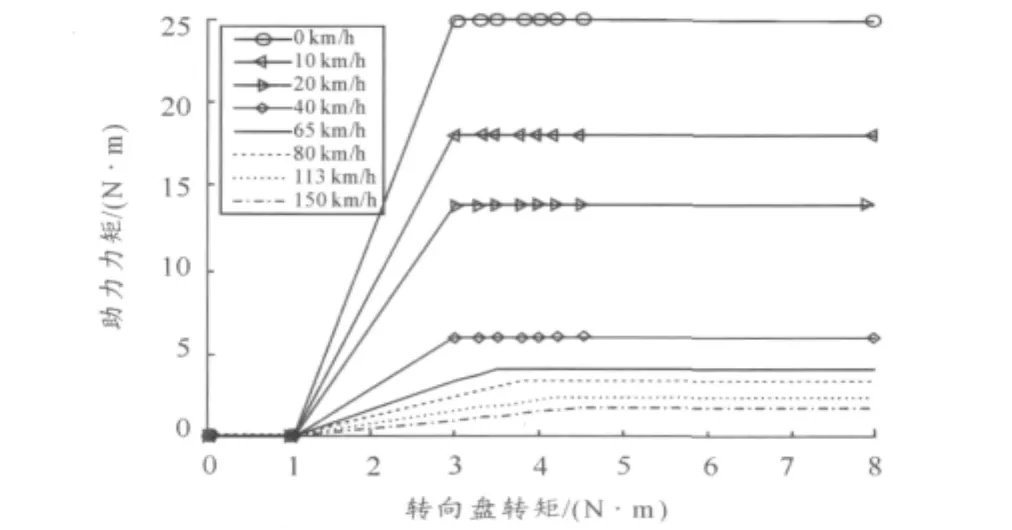
图4 助力特性曲线
2.2 补偿控制策略
当驾驶员在汽车低速行驶快速转动方向盘时,转向系统的黏性阻尼会产生较大的黏性阻力矩,使响应速度减慢,驾驶员有转向沉重的感觉。高速行驶时,由于轮胎与地面之间的侧向附着系数减小,使得汽车转向处于不稳定的波动状态。因此,可以根据转向时方向盘转动的速度进行阻尼补偿。为便于检测,本文利用电动机转速进行修正补偿,补偿电流

在特征车速下进行仿真取值,其余车速进行线性插值可得kd的变化曲线。
2.3 回正控制策略
汽车在行驶中由于车轮定位角的存在,使车轮具有自动回正的功能,但由于机械转向系统间的摩擦阻尼作用使得汽车的回正速度减慢。但随着车速的提高,回正力矩增大,轮胎与地面之间的摩擦力矩减小,汽车转向回正时会出现超调现象。因此,汽车回正控制策略为低速时增大助力电流、高速时减小助力电流[6]。补偿电流

在特征车速下进行仿真取值,其余车速进行线性插值可得kb的变化曲线。
2.4 阻尼控制策略
汽车高速直线行驶时,由于轮胎与地面之间的摩擦因数较小,地面的高频干扰会使方向盘在中间位置产生抖动。为改善汽车高速行驶时转向盘在中间位置的性能,可利用助力电机对转向系统施加阻尼控制[2]。
控制策略为让电动机绕组发生短路,电机将产生一个与转速成正比的反向力矩。忽略电感作用可推导出电机的输出转矩

2.5 综合控制
根据上述分析,制定综合控制策略。当转向盘检测转矩小于一定值时,一般不进行助力,否则会使电机频繁启动。根据文献[15]中对同款车型所进行的台架试验结果及文献[1]中所推荐的轿车常用值,本文取该转矩为1 N·m。把转向盘转矩小于1 N·m且转向盘转角小于10°时设为死区控制。死区控制内车速小于50 km/h时电机停止工作,高于50 km/h时电机绕组反接。死区之外,采取助力控制。当电机转角和转速的乘积为正时,说明汽车正在转向,因此在助力控制的基础上增加阻尼控制策略;若电机转角和转速乘积为负值,说明汽车处于回正状态,因此在助力控制的基础上增加回正控制策略。控制流程如图5所示。

图5 控制流程
3 仿真结果及分析
3.1 方向盘正弦输入试验
汽车原地转向时方向盘转矩以5 s为周期进行正弦输入,测得方向盘转角为500°时,方向盘转矩与转角的关系如图6所示。可知最大转矩从16.0 N·m减小到3.5 N·m,降低了79.36%。
汽车以40 km/h行驶,方向盘转矩以5 s为周期进行正弦输入,使汽车侧向加速度达到0.3 g测得方向盘转矩和侧向加速度的关系曲线如图7所示。用同样方法对汽车以80 km/h和120 km/h行驶时的情况进行仿真,得出助力前后最大转矩值,如表4所示。从表4中可以看出,原地转向时助力最大,随着车速的增加,助力减小,满足了电动助力转向系统转向轻便性和路感的要求。
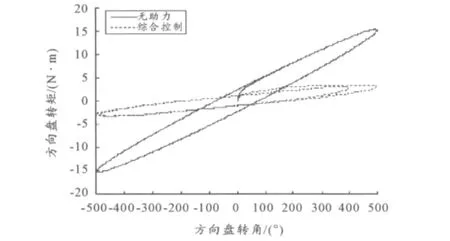
图6 原地转向时方向盘转矩与转角关系曲线
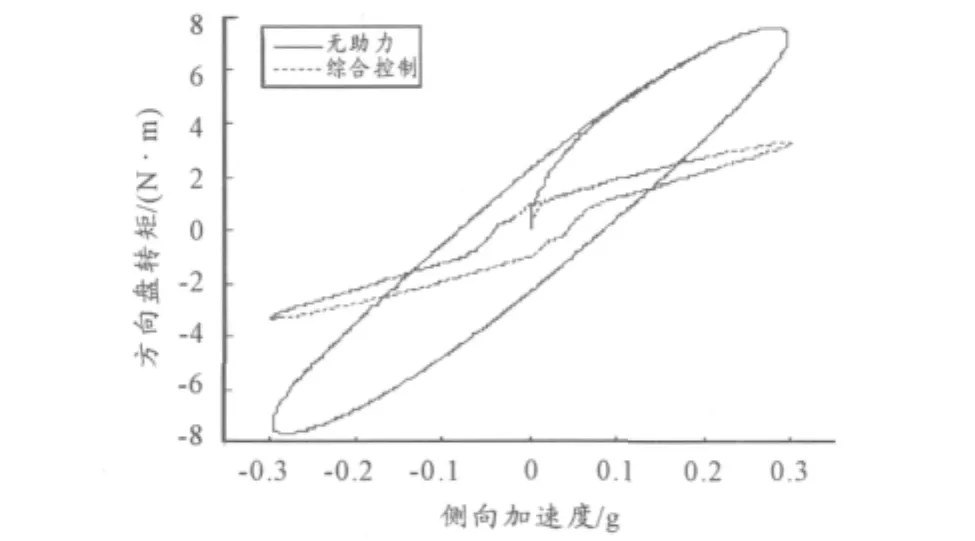
图7 40 km/h时方向盘转矩与侧向加速度关系曲线
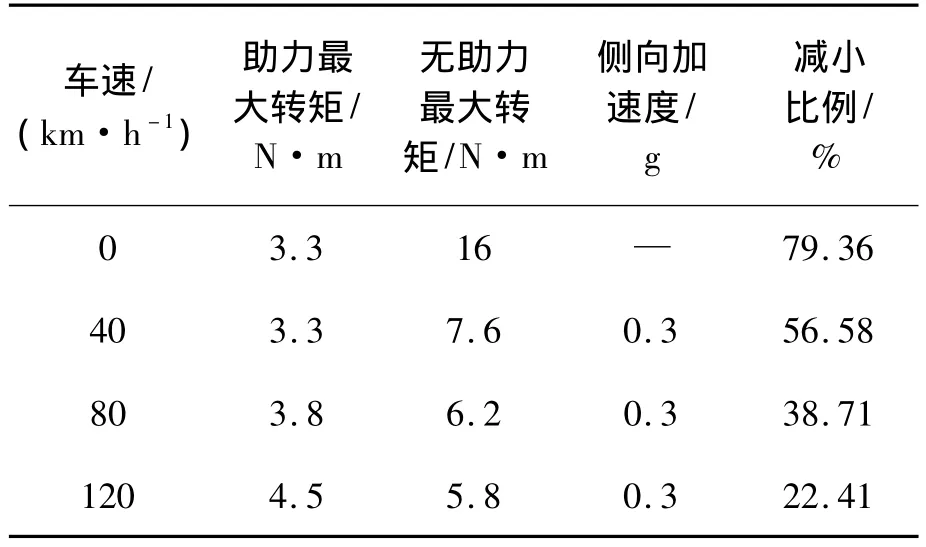
表4 方向盘正弦转向试验结果
3.2 转向性能回正试验
按照GB/T 6323.4—94规定,进行汽车操纵稳定性转向回正性能试验,包括低速回正性能试验和高速回正性能试验。评价汽车转向回正能力的2项最重要的指标为稳定时间和残留横摆角速度。由于仿真时忽略零件之间的摩擦等因素,因此本文以稳定时间为评价指标。参照QC/T 480的规定,设稳定状态为低速的回正试验的残留横摆角速度低于2°/s,高速回正试验的残留横摆角速度低于 0.5°/s。
1)低速回正性能试验。首先调整汽车前轮转角使其转向半径在15±1 m范围内,然后调整车速使侧向加速度达到4±0.2 m/s2,此时车速为29 km/h。稳定3.0 s后松开方向盘,记录横摆角速度的变化情况,如图8所示。无助力控制时达到稳定状态的时间为3.7 s,施加综合控制策略后达到稳定状态的时间为3.4 s。
2)高速回正性能试验。汽车以100 km/h行驶,转动方向盘使侧向加速度达到2±0.2 m/s2,稳定3.0 s后松开方向盘,记录横摆角速度的变化情况,如图9所示。无助力控制时达到稳定状态的时间为4.1 s,施加综合控制策略后达到稳定状态的时间为3.55 s。


3.3 控制策略稳定性分析
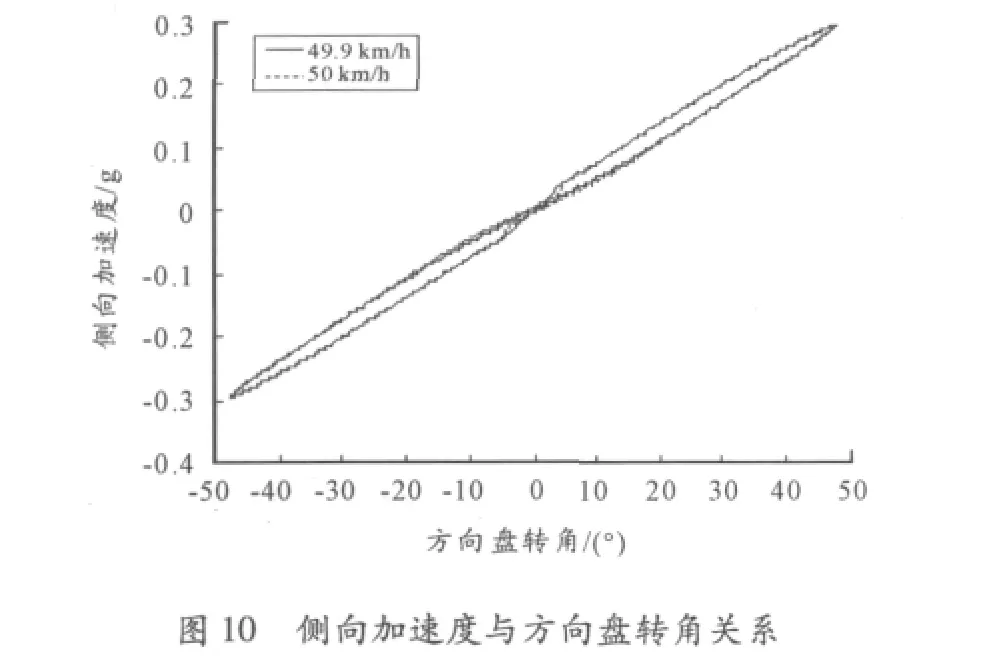
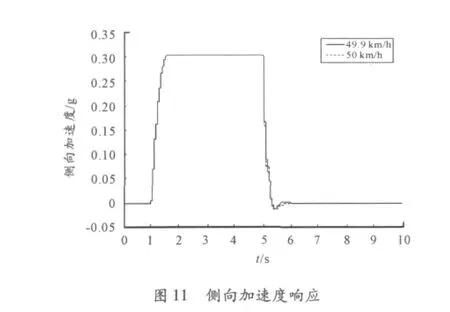
由于汽车的控制策略在速度为50 km/h时发生了变化,因此对汽车以49.9 km/h和50 km/h行驶时的情况进行仿真试验,验证2种速度下汽车转向性能的变化情况。
在2种车速下进行转向盘正弦输入试验,使汽车侧向加速度达到0.3 g,观察其侧向加速度随方向盘转角的变化情况,得到如图10所示的曲线。对汽车进行转向盘回正试验,即对转向盘施加一个阶跃转矩,使其侧向加速度达到0.3 g,稳定3.0 s后松开方向盘,观察汽车侧向加速度随时间的变化情况,得到如图11所示的曲线。
根据方向盘正弦试验和回正试验的结果得出结论,汽车在50 km/h附近行驶时,其转向轻便性和转向回正性不会发生明显变化,从而验证了控制策略的稳定性和可行性。
4 结束语
根据汽车转向特性,建立了包括机械转向系统模型、三自由度汽车模型和Fiala-桥石轮胎模型在内的完整的非线性仿真模型。根据电动助力转向的各项性能要求,分别制定助力控制策略、补偿控制策略、回正控制策略和阻尼控制策略,并在死区控制的基础上,设计了综合控制策略。仿真试验表明,制定的综合控制策略在满足转向轻便性和路感要求的同时,能够解决低速回正缓慢和高速回正超调的问题。在防止电机频繁启动的基础上,本文提出的控制策略能够提高汽车在高速行驶时转向盘中间位置的稳定性。
[1]贝绍铁,赵景波,刘海妹,等.含特殊转向工况的汽车EPS电动机控制策略[J].系统仿真学报,2009,21(18):5886-5891.
[2]申荣卫,台晓虹,赵剑锋,等.纯电动客车的电动助力转向系统的开发与实验[J].吉林大学学报:工学版,2010,40(2):311 -315.
[3]胡康博.电动助力转向系统的建模与仿真研究[D].重庆:重庆大学,2010.
[4]李伟,宋晓华.汽车EPS系统助力控制策略实现研究[J].重庆理工大学学报:自然科学版,2011(12):8-11,18.
[5]徐中明,胡康博,张志飞,等.基于Adams和Matlab的汽车EPS控制联合仿真[J].重庆理工大学学报:自然科学版,2011(10):7-12.
[6]李伟,刘荣田.汽车EPS系统可靠性Fuzzy评价研究[J].客车技术与研究,2010(3):5-8.
[7]王卫鸿.电动助力转向系统在大中型客车上的应用[J].客车技术与研究,2010(3):33-35.
[8]杨树松,曹艳玲.电动助力转向系统助力转矩控制策略研究[J].拖拉机与农用运输车,2011,38(1):74-76,81.
[9]徐中明,胡康博,余烽,等.电动助力转向系统控制策略的仿真分析[J].重庆大学学报,2010,38(8):80-84.
[10]徐建平,何仁,苗立冬,等.电动助力转向系统回正控制算法研究[J].汽车工程,2004,26(5):557-559,541.
[11]Chen J S.Control of electric power steering systems[C]//SAE.[S.l.]:[s.n.],1999.
[12]林逸,施国标,邹常丰,等.电动助力转向系统转向性能的客观评价[J].农业机械学报,2003,34(4):4 -7.
[13]Ji-Hoon Kim,Jae-Bok Song.Contro logic for an electric power steering system using assist motor[J].Mechatronics,2002,12:447 -459.
[14]Gary P.Bertollini,Robert M.Hogon.Applying driving simulation to quantify steering effort preference as a function of vehicle speed[C]//SAE.[S.l.]:[s.n.],1999.
[15]高明.基于多种驾驶模式下电动助力转向系统控制策略研究[D].重庆:重庆理工大学,2009.
[16]QC/T 480—1999,汽车操纵稳定性指标限值与评价方法[S].
[17]GB/T 6323.4—9,汽车操纵稳定性试验方法转向回正性能试验[S].
