无刷直流电动机的DSP控制
2012-07-06甄长飞
王 越,甄长飞
(重庆理工大学计算机科学与工程学院,重庆 400054)
直流电动机具有非常优秀的线性机械特性、较宽的调速范围、简单的控制电路、大的起动转矩等,但是直流电动机的电刷和换向器却成为其发展的障碍。而无刷直流电动机利用电子换向器取代机械电刷和机械换向器,既保留了直流电动机的优点,又具有交流电动机结构简单、运行可靠、维护方便等特点。随着大功率开关器件、集成电路及高性能磁性材料的进一步发展,无刷直流电动机更是得到广泛应用。传统的微处理器控制系统由于存在处理速度慢、乘除法所用周期过长、外围电路数据转换速度慢等缺点,使无刷电动机的性能得不到充分发挥[1-3]。本文基于美国TI公司TMS320LF2407A数字信号处理器(DSP),阐述了实现无刷直流电动DSP控制的原理与方法[4-12]。
1 无刷直流电动机工作原理
无刷直流电动机可以被认为是一个电动机系统,包括电子开关电路、永磁式同步电动机和位置传感器。与普通直流电动机相反,无刷直流电动机将电枢放到定子上,把转子做成永磁体。为使定子磁场与转子永磁场始终保持90°左右的空间夹角,产生转矩推动转子旋转,无刷直流电动机必须使定子电枢各相绕组不断地换相通电,才能使定子磁场随转子的位置不断变化。这个换相通电过程也可以说是磁场旋转过程。在换相过程中,定子各相绕组在工作气隙中所形成的旋转磁场是做跳跃式运动的。它们跟踪转子,并与转子的磁场相互作用,从而产生推动转子继续转动的转矩。
2 DSP控制策略
理想的无刷直流电动机的感应电动势和电磁转矩计算公式为:
其中:Np为通电导体数;B为永磁体产生的气隙磁通密度;l为转子铁心长度;r为转子半径;is为定子电流。
由式(1)、(2)可知,转子转速与感应电动势成正比,电磁转矩与定子电流成正比,因此无刷直流电动机与有刷直流电动机一样具有良好的控制性能。
图1是用TMS320LF2407A DSP实现无刷直流电动机调速的控制和驱动电路。
本设计采用TMS320LF2407A微控制器为控制核心,以功率MOSFET为功率变换元件,任意时刻电机只有两相导通,并采用PWM方式控制电动机的转矩和转速。图1中的3个霍尔传感器经整形隔离电路后分别与DSP的3个捕捉引脚相连,通过产生捕捉中断来给出换相时刻,同时给出位置信息。而电流反馈输出经滤波放大电路连接到TMS320LF2407A的ADC输入端ADCIN00,在每一个PWM周期都对电流进行一次采样,对速度(PWM占空比)进行控制,其方法是通过与DSP的PWM1~PWM6引脚经反向驱动电路的6个开关管实现PWM定频和换相控制[13-15]。
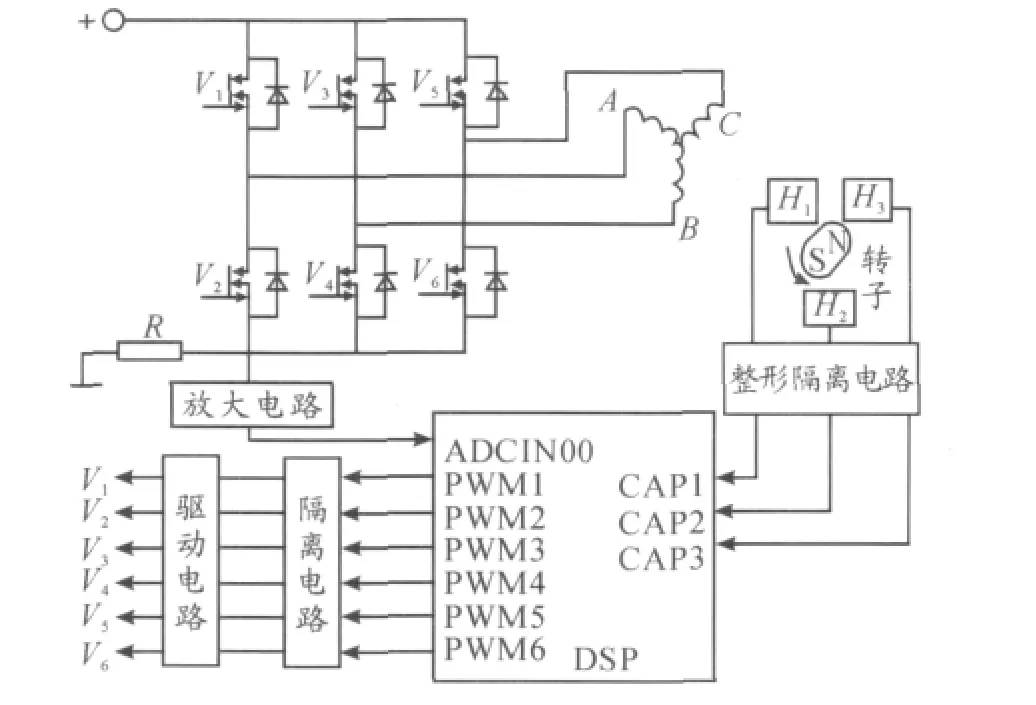
图1 DSP控制和驱动电路
无刷电动机的感应电动势与转速成正比,转矩与电流成正比。图2为无刷直流电动机调速控制框图。给定的转速与速度反馈量形成偏差,经速度调节后产生电流参考量,它与电流反馈量的偏差经电流调节后形成PWM占空比控制量,实现电动机的速度控制。其中速度反馈由霍尔位置传感器输出量经计算得到,而电流反馈通过监测电阻R得到。

图2 无刷直流电动机的调速控制框图
2.1 电流检测
用电阻R作电流传感器。将其放在电源对地端,而电动机只有两相通电,且与电阻R形成回路,电流的检测则可由分压电阻R来实现。电流反馈经滤波放大电路链接到TMS320LF2407A的ADCIN00,每一个PWM周期对电流采样1次,从而对速度(占空比)进行控制。
2.2 位置和速度检测
位置信号通过3个霍尔传感器得到,传感器的输出端直接连接到CAP/QEP引脚。3个霍尔传感器的输出信号为相位差为120°的脉冲信号,它们在每一个机械转动中共有6个上升或下降沿。将DSP的捕捉接口CAP1~CAP3设置为I/O口,检测电平状态就可以知道哪一个霍尔传感器的什么沿触发的捕捉中断。本研究将捕捉口的电平状态称为换相控制字,根据表1所示的对应关系实现换相。
位置信号还可以产生速度控制量。只要测得2次换相时间间隔Δt,就可以计算出2次换相间隔期的平均角速度。

2次换相的时间间隔Δt可以通过捕捉中断发生时读定时器2的T2CNT寄存器的值来获得。
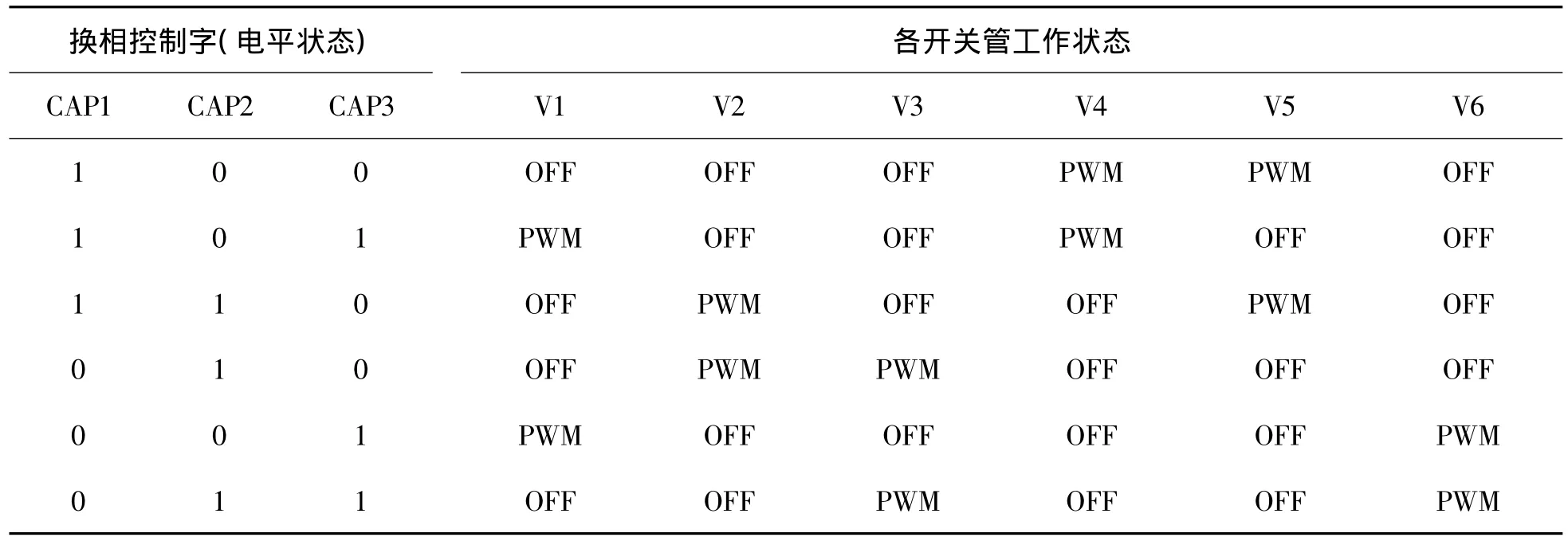
表1 换相控制字与换相的对应关系
2.3 速度调节
速度调节采用最通用的PI算法,计算公式为

其中:Vk为速度调节输出;ek为第k次速度偏差;Kp为速度比例系数;Ki为速度积分系数;T为速度调节周期。
3 控制系统软件设计
由于直流电动机在启动时同样需要位置信号,因此通过3个霍尔传感器的输出来判断应该先给哪两相通电,并且给出一个不变的供电电流,直到第1次速度调节。根据以上分析,设计控制程序如图3~4所示。

图3 主程序框图

图4 捕捉中断子程序框图
4 结束语
本研究所设计的无刷直流电动机调速控制系统利用了TMS320LF2407A芯片运算速度快、闪存大等特点,具有结构简单、数模转换(A/D)迅速、维护方便的优点,能使电动机迅速加速运转,是当前直流电动机快速控制的主流方式。
[1]王晓明,王玲.电动机的DSP控制[M].北京:北京航空航天大学出版社,2004.
[2]冉冉,陈方辉.单片机在电动车永磁直流电机控制系统设计中的应用[J].重庆工学院学报:自然科学版,2009,23(12):120-122.
[3]潘艳艳,曹华,陶彩霞.直流电机双闭环调速系统的动态模型仿真[J].重庆工学院学报:自然科学版,2009,23(8):149-156.
[4]樊帆.王耀青.DSP在三相无刷直流电动机中的应用[J].DSP 开发与应用,2007,23(1/2):225-226.
[5]岳夕彪,杨润生.基于DSP的无刷直流电动机控制电路设计[J].四川兵工学报,2010,31(2):90-93.
[6]施智雄,张玉成.基于ARM+DSP的农业科研参数及图片自动记录仪的设计[J].安徽农业科学,2009,37(7):3340-334.
[7]景军锋,唐雪娟.基于DSP的永磁同步电机全数字变频调速控制系统设计[J].电机与控制应用,2010(2):43-46,59.
[8]胡宝兴,贾颖伟.电动自行车用无刷直流电动机控制器设计[J].微电机,2006,34(12):29-30,33.
[9]郑红,隋强强,周星.DSP应用系统设计实例[M].北京:北京航空航天大学出版社,2008.
[10]刘桂芬.基于DSP的三相无刷直流电动机调速系统的研究[D].阜新:辽宁工程技术大学,2004.
[11]彭志刚.基于dsPIC30F6010的无传感器无刷直流电机控制[J].自动化与仪器仪表,2011(2):74-76.
[12]马乾.直流无刷电机在轨道交通站台安全门系统中的应用设计[J].自动化与仪器仪表,2010(4):84-86.
[13]赵美蓉,秦峰,林玉池.回转式压电微角度电动机的反馈控制系统设计[J].压电与声光,2010(6):922-955.
[14]胡长德,罗清青,诸葛晶昌.大行程纳米级压电动机的驱动控制系统[J].压电与声光,2009(5):688-691.
[15]吴政敏,黄维玲,马新敏,等.激光电源中DSP数字控制技术的研究[J].激光杂志,2003(3):22-23.
