新型横向磁通永磁电机不同控制策略的对比实验
2012-09-16涂小涛辜承林
涂小涛 辜承林
(华中科技大学电气与电子工程学院 武汉 430074)
1 引言
近年来,通过对先进驱动方式的探索和实践,电动汽车采用高效直驱轮毂电机的理念已经形成。这种新的理念就是用分布式直接驱动方式(多台电机)替代传统的集中式间接驱动方式(一台电机),扬弃燃油发动机的车桥结构和传动机构,效率高、控制灵活、结构简约。
横向磁通永磁电机(Transverse-Flux Permanent Magnet Motor,TFPMM)以低速性能好、转矩密度高的特点成为直驱式电动汽车轮毂电机的优选实施方案[1-3]。但现有TFPMM拓扑结构的工艺复杂,基本上不具备小型化基础[4-6]。相比之下,文献[7]提出的拓扑,结构和工艺都相对简单,可较好满足轮毂驱动需要,但依然存在TFPMM功率因数偏低的问题[8-12],亟待探索技术解决方案。
为此,本文以实用控制方式为基础,分别以永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)和无刷直流电机(Brushless DC Motor,BLDCM)两种驱动模式,对一台3kW(直流侧60V,50A)新型 TFPMM 实验样机进行综合实验研究,探讨有实用价值的直驱式轮毂电机的先进控制手段。
2 实验样机
新型TFPMM实验样机为三相8对极外转子轮毂结构,轴向磁化的永磁体沿圆周均匀分布,由铝环定位圈固定在转子内侧;永磁体衔于定子U形磁轭中,气隙为轴向,三相磁轭相互错开15°机械角度(即120°电角度),永磁体、轴向气隙和定子磁轭构成闭合磁路。图1a和1b分别为3kW样机三维剖切图和实物照片,样机参数见表1。

图1 新型横向磁通永磁轮毂电机Fig.1 Novel transverse-flux permanent magnet motor

表1 样机参数Tab.1 Parameters of the prototype
这种新型电机的特点是三相磁路相互解耦,相间无互感,永磁体轴向磁化,磁体数目减半,轴向尺寸缩短,结构简单,定子线圈绕制简便。同时,采用外转子结构以扁平外形与轮毂匹配,适合于电动汽车的直接驱动。
3 PMSM驱动模式
3.1 U/f=C控制
实验采用常规VVVF变频调速方式,由正弦波变频机组供电,首先以常规U/f=C(U为相电压,选取U/f=24V/50Hz)方式控制新型 TFPMM 作PMSM运行,保持转速n=375r/min不变,逐渐增加负载。表2为一组典型实验数据(转矩采用标幺值,基值Tb=45N·m,全文同)。结果表明,此时电机的功率因数和效率都比较低。实际上,这是新型TFPMM 电感较大(相间无互感)、漏磁也比普通PMSM严重所致[12]。

表2 一组U/f=C控制实验数据Tab.2 A set of results with U/f=C control
3.2 V形曲线测定
鉴于U/f=C运行方式不能很好满足驱动需要,有必要对TFPMM的电压与电流控制规律作更深入的探讨,以寻求更合理的运行控制方式。由于交、直轴磁路相近,新型TFPMM可视作隐极PMSM处理,忽略电阻压降和电枢反应影响,恒速恒转矩(即空载反电动势E0和电流交轴分量Iq不变)运行的相量图如图2所示。图示结果表明,随电压调节,一方面功率因数可连续变化,甚至可达到 1(对应图中U3,I3重合),另一方面电流I出现最小值(电流直轴分量Id=0时,对应图中U2,I2),即电流与电压间呈V形曲线关系。这也预示了一种改善电机运行性能(提高功率因数和效率)的新途径。
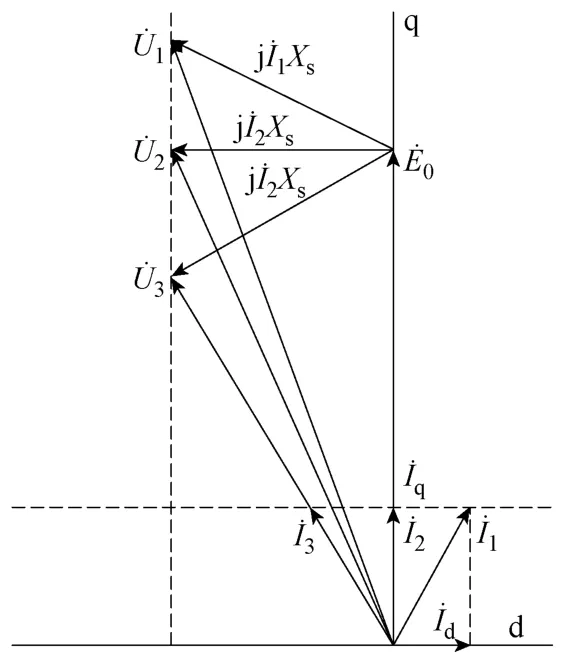
图2 恒速恒转矩相量图Fig.2 Phasor diagram with constant speed and torque
为此,计算并绘制出不同负载转矩下的理想V形曲线簇,如图3所示。图3中虚线表示电机不稳定区域界限,实际运行时该界限会向右下方移动。实验测定的V形曲线簇如图4所示,与图3的理论分析结果基本吻合。
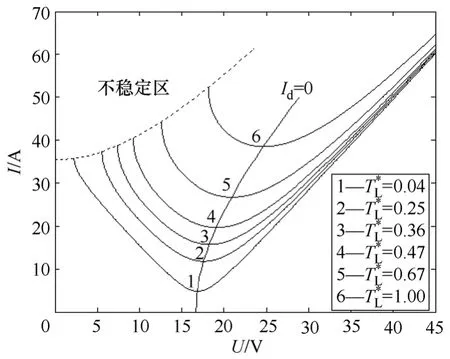
图3 理想V形曲线簇Fig.3 Ideal V-shaped curve clusters
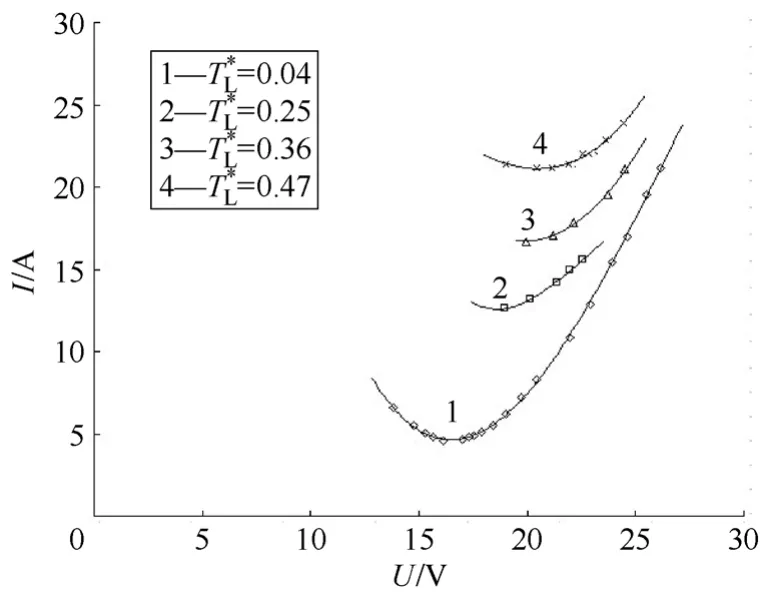
图4 实测V形曲线簇Fig.4 The tested V-shaped curve clusters
显然,若能调控电压,使电机始终能运行于V形曲线簇中的Id=0点,则电机的效率应有明显提升,功率因数也应有所变化。
3.3 Id=0控制
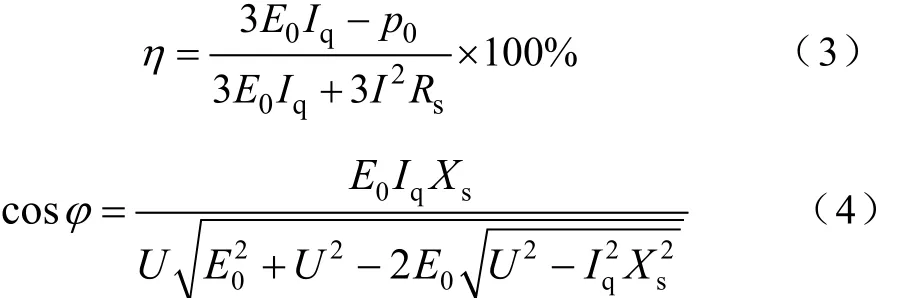
为探讨Id=0控制效果,拟与U/f=C作直接比较。参照图3,Id=0时效率和功率因数表达式为

式中p0——空载损耗;
Rs——相电阻;Xs——同步电抗。
而U/f= C控制时,效率和功率因数分别为
由于电流交轴分量Iq在实验中不可测,可换算成负载转矩,近似换算公式如下

按样机参数,根据式(1)~式(5)计算并绘制相同转速下两种控制方式的效率和功率因数曲线,如图5所示,而对应的实验结果如图6所示。
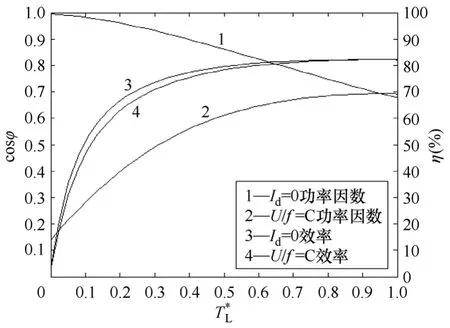
图5 Id=0控制与U/f=C控制计算结果比较Fig.5 Compared calculative results with Id=0 and U/f=C

图6 Id=0控制与U/f=C控制实验结果比较Fig.6 Compared experimental results with Id=0 and U/f=C
理论与实验结果对比表明,Id=0控制时电枢电流全部贡献于电磁转矩,相同转矩下幅值最小,损耗减小,效率提高,功率因数也有明显改善,但随负载增大,功率因数还是呈下降趋势(额定负载时降至0.67左右)因而还存在进一步改善的需要。
由于Id=0控制的实质是电流与反电动势轴线重合,这等同于直流电动机运行时的相位关系。因此,理论上讲,TFPMM有可能通过 BDLCM驱动模式最终解决功率因数偏低的问题。
4 BLDCM驱动模式
4.1 正常换相
基于TFPMM高功率因数运行需要,由PMSM模式下的Id=0控制自然转入 BLDCM 驱动模式探讨。从降低成本考虑,本实验选用最通用的两两导通(120°工作方式)BLDCM 控制器,母线电压为60V。
采用正常换相方式(换相角对应滞后反电动势过零点30°电角度),表3为一组典型实验数据(效率折算至电机端口)。此时电机效率仍不够高,机械特性亦偏软,负载能力不强(但不失步),仍未达到预期效果。

表3 一组正常换相方式实验数据Tab.3 A set of results with conventional commutation
探究原因,与常规BLDCM不同,新型TFPMM等效电感值较大(无相间互感),且为低压大电流系统,致使换相过程相对较长,电流相位滞后,与反电动势轴线发生偏移,且负载越大,电流越大(甚至出现电流连续),偏移愈严重,性能影响也就愈明显。此外,与普通直流电动机相似,负载电流较大时,电枢反应还会导致气隙合成磁场畸变,反电动势轴线前移,电流相位进一步滞后,电机性能进一步恶化。实测正常换相时对地电压与相电流波形如图7所示(= 0 .46),与分析结果吻合。

图7 正常换相时对地电压与相电流波形Fig.7 Actual waveforms of terminal voltage and phase current in conventional commutation
4.2 提前换相
在有刷直流电动机中,大容量电机通过补偿绕组和换相极来削弱电枢反应和抵消电抗电动势,从而改善换向条件,而小容量电机一般采用逆转向移动电刷的做法,其本质在BLDCM中就相当于提前换相。有鉴于此,可通过采用提前换相方式,削弱新型TFPMM换相过程长和电枢反应的不利影响,一定程度改善电流波形的同时,为二极管续流提供更为充足的空间,创造有利于电流与反电动势轴线重合(等效于Id=0)的环境,此时二者乘积最大,即转矩电流比最大,从而有效提高电机运行性能。这与普通 BLDCM 提前换相以实现恒功率弱磁扩速目的不尽相同[13-16]。下面就实验结果作进一步分析。
实验仍采用120°工作方式的通用BLDCM控制器,通过添加自制可移动式位置传感器装置获得所需的提前换相角α。图 8为实测α=30°、=0.46时对地电压与相电流波形,对比图7结果表明,负载较大时,提前换相可使电流明显减小,电机性能确有明显改善。

图8 提前换相时对地电压与相电流波形Fig.8 Actual waveforms of terminal voltage and phase current in phase advance commutation
进一步地,随着负载转矩变化,测定一组不同提前换相角对电机运行特性的影响,对比实验结果如图9所示。结果表明,适当提前换相,确能有效改善电机性能,使机械特性变硬,效率和负载能力均明显提升。

图9 不同提前换相角时性能对比Fig.9 Compared results with different phase advance angles
为获得符合最大转矩电流比的最佳运行控制,认为相同转矩和转速下直流母线电流最小时对应的提前换相角为最佳。理论上,不同负载转矩对应的最佳提前换相角不同,且随负载转矩的增大而增大。实测最佳提前换相角与负载转矩间的拟合关系曲线如图10所示。据此,以霍尔位置信号为基准,通过软件算法对换相过程和电枢反应进行相应的提前换相补偿,可使新型TFPMM获得较为满意的运行性能。
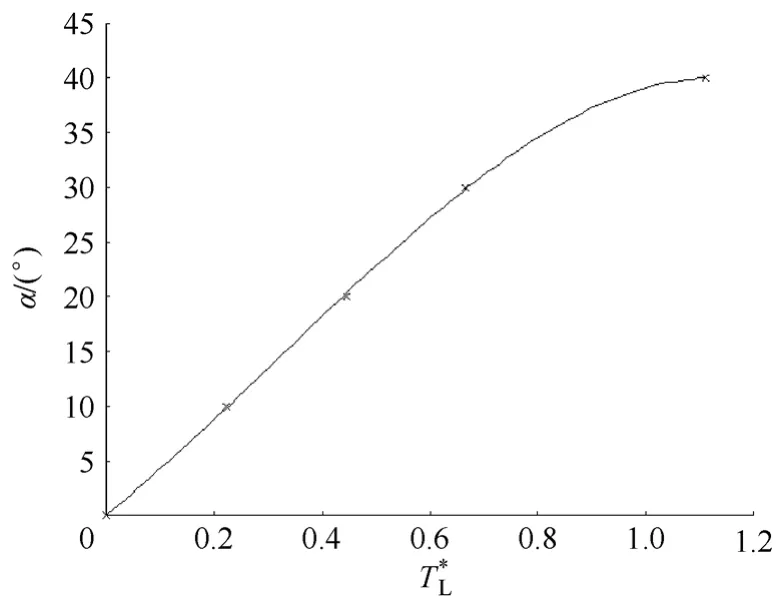
图10 最佳提前换相角与负载转矩的关系曲线Fig.10 The relation curve between optimal phase advance angle and load torque
5 驱动控制方案比较
新型TFPMM采用普通他控变频方式(U/f= C)作PMSM运行时,效率和功率因数都比较低,采用Id=0控制后,虽然效率有所提高,功率因数有所改善,但仍不能从根本上解决功率因数偏低的问题。同时,为保证较好起动性能和足够的过载能力,常规SPWM控制器容量偏大,所需车载蓄电池组串联数也较多,这既增加了车重,还加剧了空间放置矛盾。
相比之下,BLDCM 驱动模式更显经济;与正常换相情形相比,提前换相方式还可有效削弱换相过程长和电枢反应的不利影响,并有可能获得最大转矩电流比,从根本上综合解决电机的功率因数、效率和出力问题,从而使车载蓄电池数量和系统成本都有可能得到有效的控制。
6 结论
本文致力于新型TFPMM的实验研究。样机实验结果表明,辅以合理运行控制方式,电机的性能可以满足直驱式电动汽车轮毂电机的应用需要。对比结果进一步证实,提前换相的BLDCM驱动模式最为合理,而实测最佳提前换相角与负载转矩的关系曲线亦为进一步深入研究新型TFPMM在直驱式电动汽车中的应用提供了更有力的理论依据和技术支撑。
[1]褚文强, 辜承林. 电动车用轮毂电机研究现状与发展趋势[J]. 电机与控制应用, 2007, 34(4): 1-5.
Chu Wenqiang, Gu Chenglin. Application status and developing tend of in-wheel motors used for electric automobile[J]. Electric Machines & Control Application,2007, 34 (4): 1-5.
[2]Cakir K, Sabanovic A. In-wheel motor design for electric vehicles[C]. International Workshop on Advanced Motion Control, 2006: 613-618.
[3]Rahman, Khwaja M. Application of direct-drive wheel motor for fuel cell electric and hybrid electric vehicle propulsion system[J]. IEEE Transactions on Industry Applications, 2006, 42(5): 1185-1192.
[4]French C D, Hodge C M. Optimised torque control of marine transverse-flux propulsion machines[C].International Conference on Power Electronics,Machines and Drives, 2002: 1-6.
[5]Masmoudi, Njeh A, Elantably A. Optimizing the overlap between the stator teeth of a claw pole transverse-flux permanent magnet machine[J]. IEEE Transactions on Magnetics, 2004, 40(3): 1573-1578.
[6]Guo Y G, Zhu J G, Watterson P A, et al. Comparative study of 3-D flux electrical machines with soft magnetic composite cores[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1696-1703.
[7]陈金涛, 辜承林. 新型横向磁通永磁电机研究[J].中国电机工程学报, 2005, 25(15): 155-160.
Chen Jintao, Gu Chenglin. Study on novel transverseflux permanent magnet machine[J]. Proceedings of the CSEE, 2005, 25(15): 155-160.
[8]Harrism R, Pajooman G H, Sharkh S M. Problem of power factor in VRPM (transverse 2flux) machines[C].International Conference on Electrical Machines and Drives, 1997: 386-390.
[9]Lu K Y, Ritchie E, et al. Modeling and power factor analysis of a single phase surface mounted permanent magnet transverse flux machine[C]. Proceedings of the Fifth International Conference on Power Electronics and Drive Systems, 2003, 2: 1609-1613.
[10]Zhao Yu, Chai Jianyun. Power factor analysis of transverse flux permanent machines[C]. Proceedings of the Eighth International Conference on Electrical Machines and Systems, 2005, 1: 450-453.
[11]赵宇, 柴建云. 横向磁场永磁电机性能研究[J]. 电机与控制应用, 2006, 33(7): 9-13.
Zhao Yu, Chai Jianyun. Study on Performance of transverse flux permanent motors[J]. Electric Machines & Control Application, 2006, 33(7): 9-13.
[12]褚文强, 辜承林. 新型横向磁通永磁电机磁场研究[J]. 中国电机工程学报, 2007, 27(24): 58-62.
Chu Wenqiang, Gu Chenglin. Study on magnet field of novel transverse-flux permanent magnet machine[J].Proceedings of the CSEE, 2007, 27(24): 58-62.
[13]Chan C C, Jiang J Z , Xia W, et al. Novel wide range speed control of permanent magnet brushless motor drives[J]. IEEE Transactions on Power Electronics.1995, 10(5): 539-546.
[14]Lawler J S, Bailey J M. Limitations of the conventional phase advance method for constant power operation of the brushless DC motor[C].Proceedings of IEEE Southeast Conference, 2002:174-180.
[15]Nguyen BinhMinh, Ta Minh C. Phase advance approach to expand the speed range of brushless DC motor[C]. Proceedings of the International Conference on Power Electronics and Drive Systems, 2007:1255-1262.
[16]Sue Shinn Ming, Wu Kun Lin, Syu Hih Sian, et al. A phase advanced commutation scheme for IPM-BLDC motor drives[C]. IEEE Conference on Industrial Electronics and Applications, 2009: 2010-2013.
