芯片识别定位系统中LED光源的应用研究
2012-09-16王小捷韩微微
李 恺,王小捷,韩微微
(北京中电科电子装备有限公司,北京 100176)
机器视觉就是用机器代替人眼来做测量和判断,通过将被摄目标转换成图像信号,传送给图像处理系统进行运算来做出各种判断。
作为芯片拾取模块的核心功能,芯片识别定位系统直接影响到芯片拾取过程中的效率与精度。本文根据要求通过计算选取了视觉系统中的镜头、相机、光源等硬件,然后比较不同光源照射方式下的识别结果,为设备中的光源使用提供参考依据。
1 相机与光源
整个机器视觉系统是由众多部分组成,而相机在整个视觉系统中起到了眼睛的作用。工业相机在机器视觉系统中的主要作用是图像的采集,而获取的图像是否精确清晰对后期的处理和判断有着关键性作用,因此相机的选择很大程度上决定系统的精度和可靠性。
按照不同的标准和用途,又可以对相机进行不同的分类:
根据相机响应的波段不同,可将相机分为:红外相机、可见光相机、紫外相机等;根据相机是否能够反映被测物的色彩又可以将相机分为彩色相机与黑白相机。如果要处理的是与图像颜色有关就应该选择彩色相机,其它情况下例如查看图像边缘则要选择黑白相机,同样分辨率的相机黑白比彩色的精度高。
在工业应用中,如果没有特殊要求,使用可见光波段的黑白相机即可以满足应用需求。实验中采用可见光波段的黑白相机。该相机的响应曲线如图1所示[1]。

图1 CCD波长和光谱灵敏度
从光谱灵敏度曲线可以看出CCD的峰值灵敏度为500nm波长的光,参考光谱,采用绿光或蓝光可以得到较好的响应。
在相机已经确定的情况下,光源的设计对图像的特征显示就显得尤为重要。使用合适的光源可以使图像清晰、对比度高、特征明显、易于进行处理;反之则会使图像处理困难,甚至不能显示需要的特征,造成特征提取失败。
光源不是简单的照亮物体,而是与照明方案配合,以合适的方式将光线投射到被测目标上,应尽可能地突出被测物的特征,使需要检测的部分与那些不重要的部分之间产生明显的区别,增加足够的对比度;同时还应保证足够的整体亮度、强度等。好的光源和照明方式能够改善整个系统的分辨率,降低噪声,简化图像分析与处理的软件算法,在机器视觉系统中对整个系统起着非常重要的提升作用,是视觉图像采集中的个关键环节。对光源和照明系统设计的原则是“照明均匀,避免反光”[2]。针对每个特定的应用实例,要设计或选择相应的照明装置。从光学角度来看,要根据被测物的不同颜色、材质以及光源的强度、方向、光谱等差异来综合考虑,突出需要的特征信息,确保采集的图像达到最佳效果。
针对芯片识别定位系统中的材料特点,不同材料的反射率相差很大。目前常用芯片的基底材料主要有硅、蓝宝石、碳化硅等,其中以硅作为基底的芯片,其表面光滑,光反射率高。凸点的材料一般为铜、锡,形状为长方形或球冠形,其表面光滑,光反射率高。在我们的实验中采用的芯片凸点材料为铜,形状为球冠形。
2 光源选择
光源可分为自然光源和人造光源两类。自然光源使用不方便且发光特性不易控制,一般不适合用作计算视觉系统中的照明光源。而人造光源中一般选用LED光源作为机器视觉中的首选光源。按照不同的标准和用途又可以对LED光源进行不同的分类。
2.1 光源形式的选择
2.1.1 环形光源与条形光源
环形光源和条形光源采用LED在周围排列,发出的光线向内汇聚,光线方向和相机观察方向垂直或接近90°角,多用于金属工件刻印字符、光滑表面划痕、瓶口尺寸或裂纹、平面工件表面质量等的检测。光源发出的光不直接进入摄像机,瑕疵等表面的变化引起光线改变方向进入镜头,从而实现高对比度,一般暗视场(Dark Field)均用此类光源实现[3]。图2是在环形光源或条形光源照射下的光线方向示意图。光源发出的光线在基板上产生镜面反射,没有直接进入镜头,不能成像,因此该区域为暗;一部分光线照射到凸点上通过反射返回镜头,该区域为亮。

图2 环形/条形光源照射示意图
环形光源或条形光源照射下得到的实际图像如图3所示。
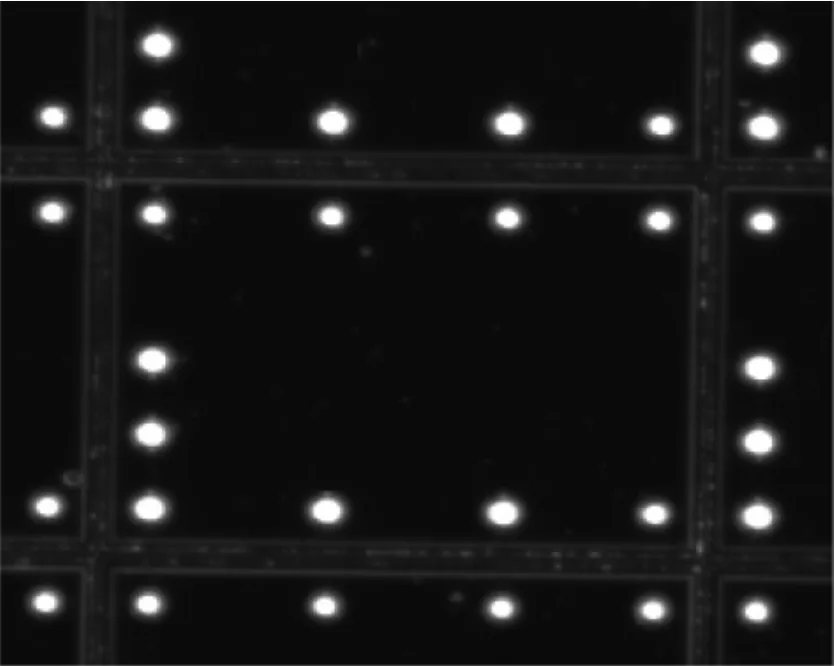
图3 环形/条形光源照射效果图
从图3中可以看出,芯片的边缘几乎分辨不出,凸点边缘比较模糊
2.1.2 同轴点光源
同轴点光源是指照明光线平行地穿过同轴镜头的垂直面,观察得到的图像是对于来自镜头照明光线的真实反射。同轴照明对于观察平整或抛光的表面是非常理想的,高亮度均匀光线通过半透半反镜后成为与镜头同轴的光线,均匀照射在具有反射性的工作界面,主要用于金属玻璃等光洁表面的划痕检测,芯片和硅片的破损检测。同时,同轴光源位于照明光路的侧面,这样的照射方式可以减少光路的复杂性,避免光源的放置给光路带来的不必要的麻烦。
图4是同轴点光源照射下的光线方向示意图。照射到凸点上的光被反射到镜头外,不能成像,因此该区域为暗,基板由于镜面反射光线全部返回到镜头,因此该区域为亮。

图4 同轴点光源照射示意图
同轴点光源照射下得到的实际图像如图5所示。

图5 同轴点光源照射效果图
从图5中可以看出,芯片边缘比较清晰,凸点边缘与芯片对比度高
2.2 照明方式的选择
在机器视觉中,主要的照明方式有连续照明和触发照明两种[4]。两者的区别主要有:(1)控制的频闪照明方式可以成倍提高光源亮度,而连续照明则不具备这个能力,不能改变光源的亮度。(2)控制器在收到外部触发信号后,会按照预设脉冲宽度点亮光源,随即自动关断光源,直至下一个脉冲到来;而连续照明方式下,光源持续点亮,并不能随相机的触发点亮和关断光源。
这使得在检测运动的物体时,频闪照明具有无可比拟的优势。为避免拍摄运动的物体时出现“拖尾”现象,工业相机需要设置尽量短的曝光时间,同时为提高图像的信噪比,相机的增益值和镜头的光圈孔径不能被无限增大。尤其在相机视场小,物体运动(或震动)速度较快的场合,提高光源的瞬间亮度是最佳选择。这一点,频闪照明的作用是无可替代的。
图6、图7是在连续照明和频闪照明时相同图片的亮度对比。
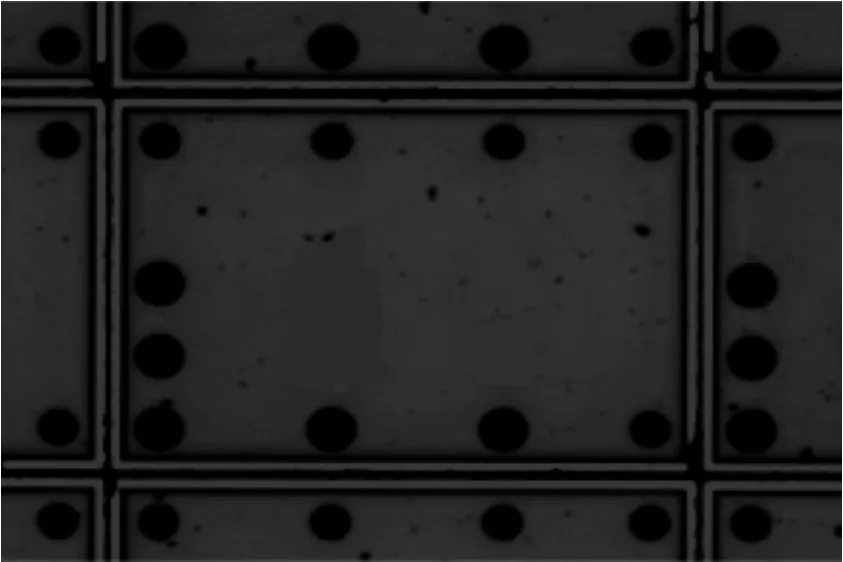
图6 连续照明

图7 频闪照明
很明显,在相同曝光时间下,频闪照明所采集图片的亮度和清晰度要高于连续照明。因此,本实验采用频闪照明作为首选的照明方式。
2.3 颜色选择
在所有的金属材料中,只有金比铜的反射率小。而作为芯片基底主要材料的硅,在可见光光谱内是不透明的,具有很高的折射系数,是一种具有极高反射率的材料。因此虽然理论上绿色或蓝色光源可以实现CCD在最高灵敏度工作,但由于硅和铜凸点对光的反射特性相差较大,会降低图像的灰度精度,同时工作距离也会影响CCD的灵敏度。图8所示的是CCD的灵敏度随工作距离变化的曲线[5],此时红色光对CCD的敏感度要强于绿色光。
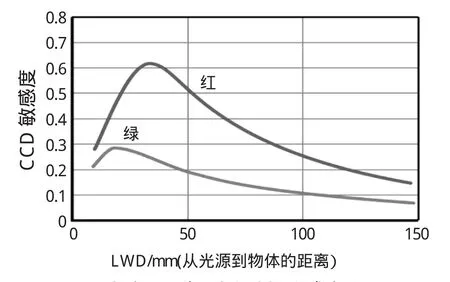
图8 光源工作距离与CCD敏感度图
另外,按照系统要求,需要识别的是芯片边缘是否有缺陷(包括崩边、裂痕等)和芯片表面的裂纹,根据色环对于增大图像对比度的知识:芯片本身材料为硅(冷色),凸点材料为铜(暖色),采用相反色温的颜色照射,可以达到最高级别的对比度。所以暖色光照射冷色材料,图像会变亮;照射其他颜色材料,图像会变暗。
通过理论分析认为:针对芯片识别定位系统中芯片和凸点本身的材料,要取得对比度好的图像,采用红色光源照明的效果优于蓝光和绿光,下面通过实验加以验证。
3 实验条件
实验目的是在不同颜色、不同照明方式光源照射下采集芯片图像,为图像匹配处理提供数据集。
视觉系统结构如图9所示。
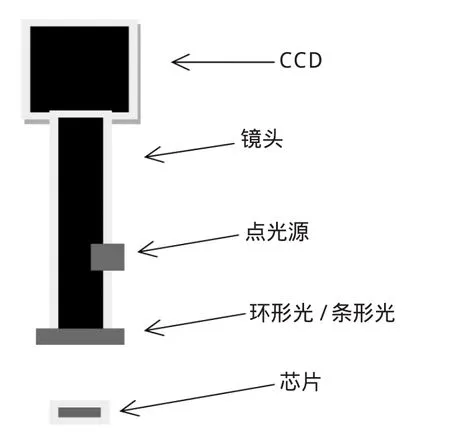
图9 视觉系统结构图
实验中采用的芯片尺寸为2.5mm×2mm,要求视场内要有3×3个芯片,所以视场要略大于7.5mm×6mm,选定视场为10mm×8mm(对角线12.8mm)。而相机靶面通常为4∶3的长方形,为了满足视场要求,应该以靶面的短边长度为参考来计算视场。
系统精度:0.02mm,8/0.02=400,因此相机靶面短边的像素数大于400
根据计算的像素数,可以选择CCD相机靶面1/3(4.8mm×3.2mm),分辨率为 752×480,像元尺寸小于20μm。
镜头的放大倍率β=3.2/8=0.4,工作距离在100~120mm之间即可满足要求。
根据以上的计算结果分别对镜头和CCD相机选型。
3.1 镜头
实验中选用Navitar Zoom 6000镜头,具体参数见表1。

表1 镜头参数表
此镜头的工作距离、放大倍数、视场范围、分辨率均满足对芯片成像的要求。
3.2 CD相机
CCD即电荷耦合器件,CCD摄像机的作用在于将被摄物体通过镜头聚焦到 CCD芯片上,产生信号电荷,并通过存储、滤波、放大处理后,把二维光学图像信号转变为一维视频信号输出。它包括了分辨率,图像噪声,扫描方式等相关特性参数。其中,分辨率是CCD摄像机中一个最重要的参数,表征了相机对物象中明暗细节的分辨能力。

表2 CCD参数表
选用MVC360MF型1/3单色逐行扫描CCD,该相机有效分辨率为752×480,可与合适的镜头搭配达到设计精度要求,且价格为1500元,成本较低,满足经济性指标。
3.3 光源
LED光源具有频率集中、寿命长、容易做成各种形状、低的热辐射等特点,已经成为芯片识别定位系统里使用最多的光源类型。同时它还具有一个对于图像处理来说相当重要的特性,即它是直流驱动,光亮度能够长时间保持恒定。而普通的卤素灯和荧光灯都是交流驱动,光亮度也会相应成正弦曲线变化,特别是当高速相机采集的频率高于光源的频率时,采集图像时就很难获得一致的照度。实验中采用的是直流驱动的高亮度LED点光源、环形光源和条形光源(康视达公司的NSPL系列)进行测试。
4 实验采用的图像算法
归一化匹配算法:该算法是一种经典的匹配算法,也称为 NC(Normalized Correlation)算法。此方法的思想是通过计算模板图像和待匹配图像的匹配值来确定匹配的程度。匹配值最大时的搜索窗口位置决定了模板图像在待匹配图像中的位置
[6]。匹配定义一般有如下两种形式:


NC算法具有很高的准确性,但参与NC搜索算法的特征点比较多,速度较慢,在应用时所用的计算时间过长,实时性不好。可以采用图像金字塔、序贯相似性等对图像算法进行改进,以提高搜索速度。
获取图像经过处理后的效果分别采用红,蓝,绿三种颜色的LED点光源,红色、蓝色LED环形光源,红色LED条形光源进行实验,所用CCD,镜头的参数如前所述。具体的实验结果见图10(得分的满分为1)。

图10 实验结果
对于每种照明方式,都采集了100幅图像作为数据集进行匹配处理,具体的结果如表3所示。
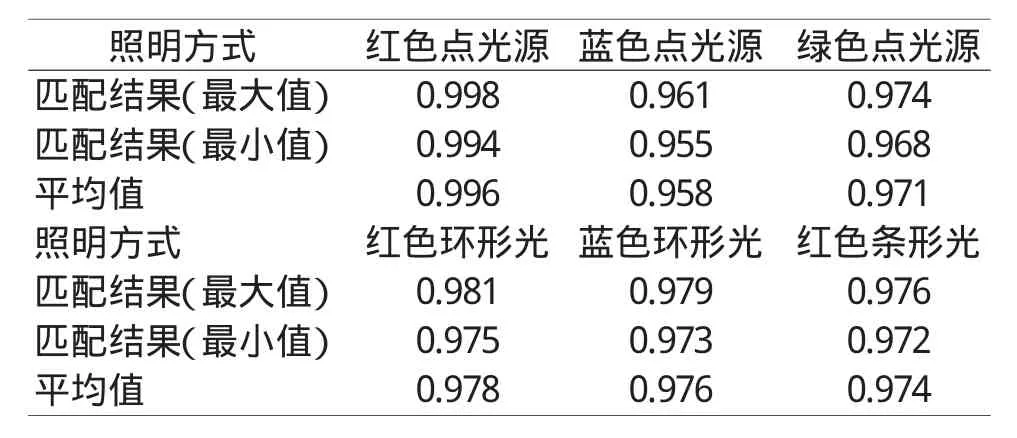
表3 匹配结果汇总表
通过对比可以发现,采用红色同轴光源照明得到图像的匹配得分平均值为0.996,高于其他光源。实验结果与之前的理论分析一致。说明红色点光源是目前所用芯片(硅基板,铜凸点)的最优选择。
5 结论与展望
LED光源在芯片识别定位系统中起着非常重要的提升作用,是视觉图像采集中一个关键的环节。本文通过分析CCD的光谱灵敏度曲线和芯片的材料特点以及光学特性,分别使用红色、绿色、蓝色的同轴点光源和红色、蓝色环形光源以及红色条形光源进行图像采集,通过归一化匹配算法对实验图片进行模板匹配分析,对采集得到的数据集做匹配计算,得出红色LED点光源最适合目前铜凸点,硅基板的芯片。
总体来讲,在设计光源照明系统时,应该综合考虑材料的性质、颜色、形状等特点,以满足具体的检测要求。所以针对不同的材料,要设计相应的照明系统,有时可能还需要采取组合光源才能突出被检测目标的特征,达到最佳的拍摄效果。
:
[1]微视新纪元样品选型手册[M].2010版.
[2]申晓彦,王鉴.用于视觉检测的光源照明系统分析[J].灯与照明,2009(3):7-9.
[3]宋贤杰,屠其非,周伟,等.高亮度发光二极管及其在照明领域中的应用[J].半导体光电,2002,23(5):356-360.
[4]张明轩,于津江,牛萍.大功率LED频闪光源[J].中国照明电器,2009(9):26-28.
[5]刘焕军,王耀南,段峰.机器视觉中的图像采集技术[J].电脑与信息技术,2003(1):18-21.
[6]宋小闯.基于灰度和几何特征的图像匹配算法研究[D].天津:河北工业大学硕士论文,2008(11).
