一种新型的底部对准光学系统设计
2012-09-16刘金荣刘卫平
刘金荣,刘卫平
(中国电子科技集团公司第四十五研究所,北京 100176)
压力传感器、石英晶体震荡器、微电子机械加工、薄厚膜混合电路、功率半导体器件、体声波器件、放电二极管等器件的制造都要求基片双面曝光。在双面对准曝光机中,底面对准光学系统是必不可少的重要部分(BSA:Bottom Side A lignment)。
1 先进对准系统
现在采用的比较先进的对准系统实际上是一显微物镜直接成像在CCD靶面上,省去了目镜。显微物镜为共轭距无限远物镜,工作原理如图1所示。物体准确地位于物镜的物方焦面处,经物镜所成的像位于无限远处(即物镜的共轭距为无穷大)。在平行光路中加入辅助物镜,则在其后焦面处(也即CCD靶面处)可以得到物体的倒立放大实像。如图1所示。
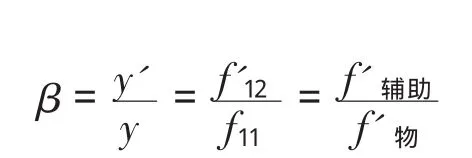
这种显微物镜的优点是,在物镜和辅助物镜之间是平行光路,有利于装配调整,且可在其间加入棱镜、滤光片和偏振片,而不引起像点位置变动、产生双像叠影等。这种显微物镜的放大率由下式决定:
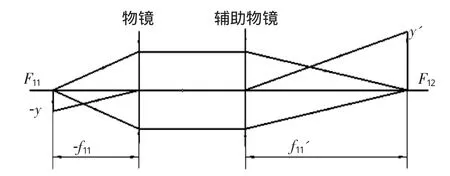
图1 显微镜原理图
在使用过程中,一般保持辅助物镜不动,而只改变物镜的焦距,以达到变倍的目的。
2 新型的BSA系统
新型BSA系统的原理与图1所示相同,只是物镜不动,改变辅助物镜的焦距,通过遮光板在光路中切换以达到变倍目的。这种对准系统结构简单,体积小,其单支光路示意图如图2所示。
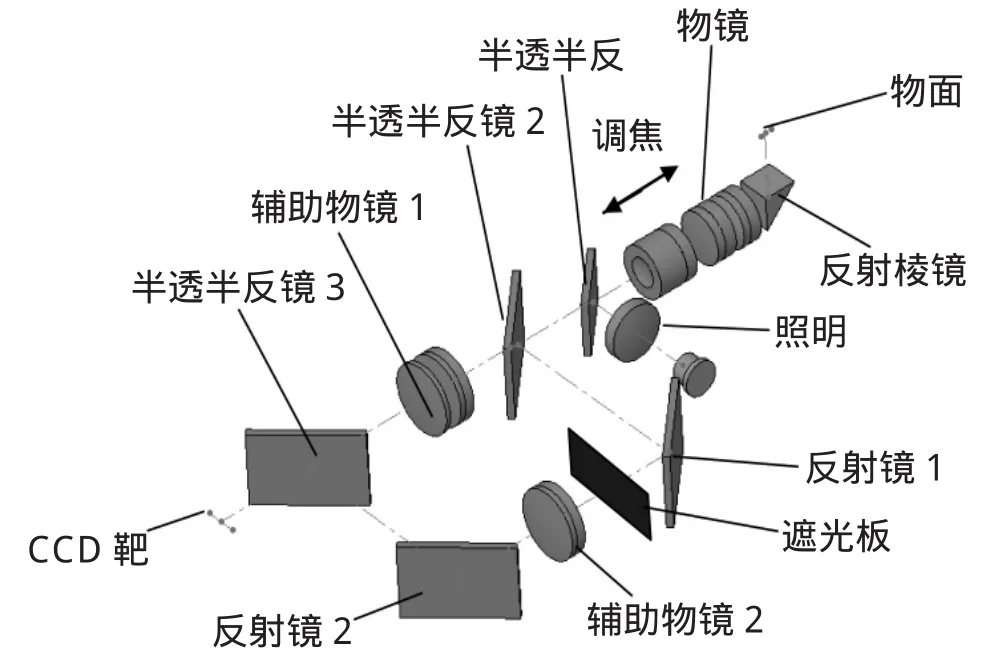
图2 单支光路示意图
系统中有一组物镜,两组辅助物镜。光线经过照明聚光镜射到半透半反镜1,反射进入物镜,通过反射棱镜照到物面,然后再反射回半透半反镜1、半透半反镜2、辅助物镜1和半透半反镜3,成像在CCD靶面,此时遮光板遮挡在辅助物镜2前面。当遮光板挡在辅助物镜1前面时透过半透半反镜1的一部分光线经半透半反镜2反射到反射镜1上,再经反射镜1透过辅助物镜2照到反射镜2上,之后经半透半反镜3反射成像在CCD靶面上。

3 物镜结构及像差分析
物镜结构(内窥)如图3所示。
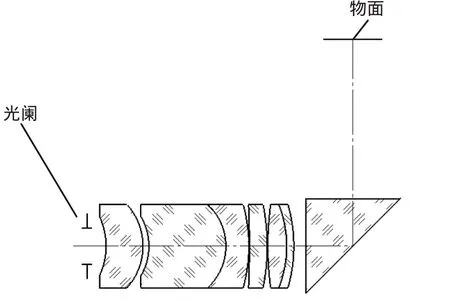
图3 物镜结构图

焦深公式为:

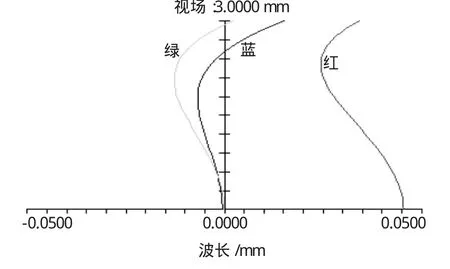
图4 三色光线球差曲线
由表1可知边缘球差L′m=0.002249,稍微有一点过校正,应用剩余球差公式应有:
L′sn≤6△ =0.2112
而实际计算出 L′sn也就是 L′0.7=0.01272大约为公差的1/16
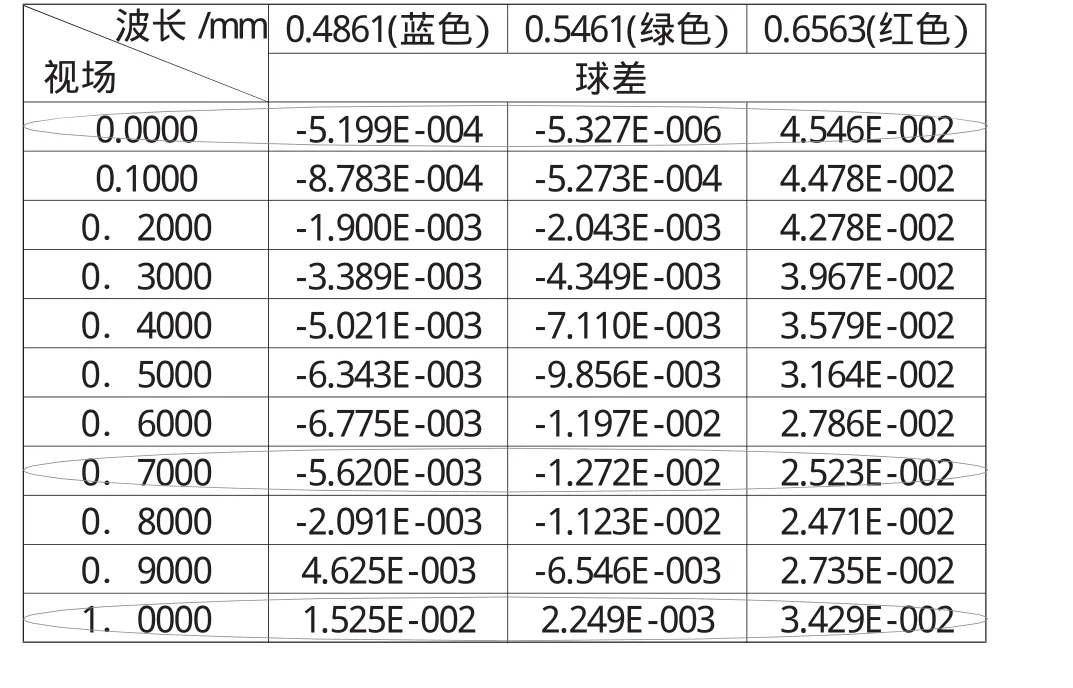
表1 三色光线各视场球差值
由表2可知垂轴色差应有:LACL≤△=0.0352,实际计算值为0.00133约为公差的1/26
EXPP为相对于像面的出瞳位置,数值已达到1201mm,物镜远心。
EFFL为有效焦距,与理想值误差0.75%,虽然没准确到24mm,但因为不是测量显微镜,允许有一定的误差存在。
总的来说,这个系统的各类像差校正得非常好。

表2 像差数据表
物镜设计结果用调制传递函数(MTF)评价,如下图5所示。可见0.5461mm波长的3个视场MTF曲线都与衍射极限几乎重合,物镜各像差校正的很好。
4 辅助物镜设计
两组辅助物镜都可采用一组胶合组达到设计要求,所用材料完全相同,只是曲率不同。如图6所示。
图7和图8分别为辅助物镜一和辅助物镜二同物镜连通后的MTF曲线,都与衍射极限几乎重合,这表明这两路对准显微镜像差都校正的很好。
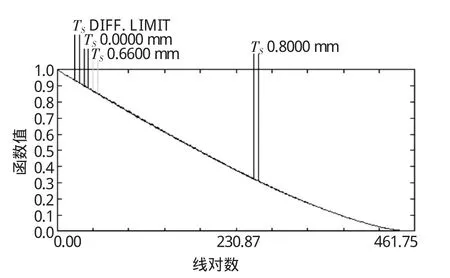
图5 物镜调制传递函数曲线

图6 辅助物镜

图7 辅助物镜一调制传递函数曲线
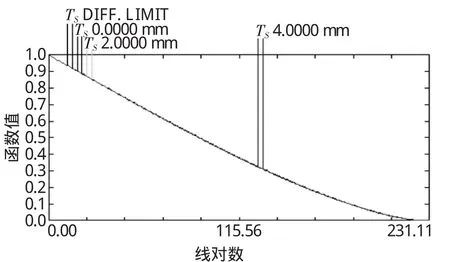
图8 辅助物镜二调制传递函数曲线
5 整个底部对准光学系统的 x、y、z三向控制
z向调焦可通过内部光路实现,见图2,只要使物镜整体前后移动即可实现调焦,x、y两个方向的运动通过一个两维台整体移动整支光路,导轨移动产生的误差对光路不会有影响。
6 结 论
通过软件仿真,这种新型的底部对准光学系统的图像质量性能会有很大提高,x、y工作台机构运动时,图像的稳定性也很好,总体质量优良。
:
[1]袁旭沧.光学设计[M].北京:北京理工大学出版社,1988.
[2]张以谟.应用光学[M].北京:机械工业出版社.1984.
[3]钟锡华.现代光学基础[M].北京:北京大学出版社.2003.
