太阳跟踪定位技术及其应用研究
2012-09-05单黎明
单黎明
(北京控制工程研究所,北京100190)
太阳跟踪定位技术及其应用研究
单黎明
(北京控制工程研究所,北京100190)
太阳跟踪定位技术广泛应用于能源、气象和航天等领域,系统全面地对相关方法进行分类和阐述,并对多孔复用、太阳光纤导入等较新应用进行了分析,最后总结了该领域内相关技术发展的瓶颈问题,展望了未来的研究方向.
太阳跟踪定位;多孔复用;光纤导入
太阳是距离地球最近的恒星,相比于月球、地球和其他恒星等星体,光照强,光亮面积大.作为一个准确、易知的参照体,它的应用主要分为两类:跟踪和定位.跟踪是指在相对长时间内将太阳看作运动而观测物相对静止,主要保证观测物不断对准太阳.而定位是指则在相对短时间内将太阳看作静止而观测物相对运动,主要保证获得观测物在太阳坐标系中的具体方位信息.
1 太阳跟踪
太阳跟踪技术应用广泛于地面民用:在太阳能发电领域,太阳能板通过跟踪能及时对准太阳,发电效率比固定板提高36.4%[1];在大气监测中,太阳跟踪系统能将太阳光引入光谱仪,获得高分辨率的FTIR光谱,再经算法处理得到气体成分[2].现有的太阳跟踪技术主要分为两大类:
1.1 太阳运行轨迹跟踪方式
太阳运行轨迹跟踪是一种主动跟踪方式,根据太阳运动规律和当地地理位置及时间,得到太阳角度信息,设定电机转动时间,进行定时操作,使太阳能接收器基本跟随太阳转动.
太阳在天球坐标系中的位置可以用高度角 α和方位角r来确定,计算公式如下[3]:
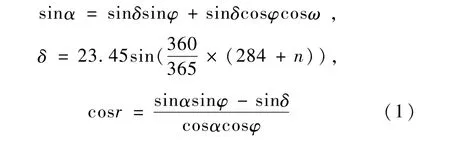
其中φ为当地纬度,δ为太阳赤纬角.春分秋分时δ=0°,夏至时δ=23.5°,冬至时δ=-23.5°. ω为时角,是用角度表示的时间,每15°为1h,且正午时,ω=0°,上午ω>0°,下午ω<0°.n为一年中的日期序号,如春分时,n=81.此跟踪系统需要用到时角,且系统需要根据日出日落时间判断启动或停止太阳跟踪,所以时钟模块是系统中不可少的部分.
1.2 传感器跟踪方式
传感器跟踪是一种被动跟踪方式,该方法检测太阳光和光伏器件之间的偏差并转换为电信号,当偏差达到某个设定数值的时候发给电动机一个动作指令带动光伏器件转动,当偏差小到设定数值时,电动机停止转动.
偏差检测一般采用四象限方式[4],如图 1所示,A、B、C、D 4个区域分别是4个光伏探测器,中心部分为太阳光线照射形成的光斑.当传感器对准太阳时,光斑位于平面中心形成均匀分布.当太阳移动时,光斑将在平面上移动,从而造成光斑在平面上的分布不再均匀,从而使4个光伏探测器输出发生变化,即可判断光斑移动情况.
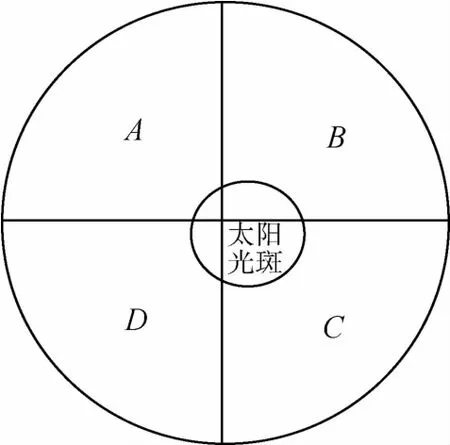
图1 四象限原理Fig.1 Four-quadrant principle
上述两种方法各有其优缺点.主动跟踪方式对电机定时控制,可避免电机的频繁动作,有效保护电机.虽然根据经验得到的轨迹从较长时间段来看是基本准确的,但对于个别时间则误差会很大且会不断积累.此外,纬度的测量和太阳高度角、方位角的计算都为此法的应用带来不便.而被动跟踪方式对太阳进行实时跟踪,可保证对太阳的对准时效,但会损害电机.此外,虽然在晴天时效果很好,但阴雨天则由于太阳辐射和环境光照差别不大,会造成电机的不动作,即无法正确跟踪太阳;另外飞行物和建筑物的遮挡干扰也会使得电机动作频繁.
综上述,可权衡利弊采用两种方法相互结合,相互验证结果,取长补短.
2 太阳定位
太阳定位要获得太阳在观测物坐标系的具体方位信息.通过定位,航天器可获取航行中的姿态信息或者着陆时位于所在星球的经纬信息.本文将其分为直接法和间接法.直接法以光电池为感光元件,根据太阳光线在光电池上的投影位置一步获得太阳光线与光电池面的夹角,该方法简单易行,但是精度低.间接法以CCD或CMOS等成像器件为感光元件,要先提取太阳影像,然后计算太阳中心坐标(Xc,Yc),该方法算法复杂,但是精度高.
2.1 直接法
直接法主要应用于太阳敏感器,可划分为模拟式和数字式.
模拟式太阳敏感器又称为余弦检测器,它的输出信号强度与太阳入射角有关,其关系式[5]为

其中,I0为光电池的短路电流,θ为太阳光束与光电池法线方向的夹角.
模拟式太阳敏感器工作原理如图2所示,它由两个间距很小、特性接近的光电池、光学透镜(或狭缝)和处理线路组成.当太阳光照到两个光电池上时,两者所产生电流之差为敏感器输出.太阳光垂直入射时,敏感器输出为零.当太阳光线与垂直轴不重合时,光电池输出的两个电流差值正比于入射角余弦,电流符号代表入射角方向,即太阳光线是从垂直轴左边或者右边射入[6].
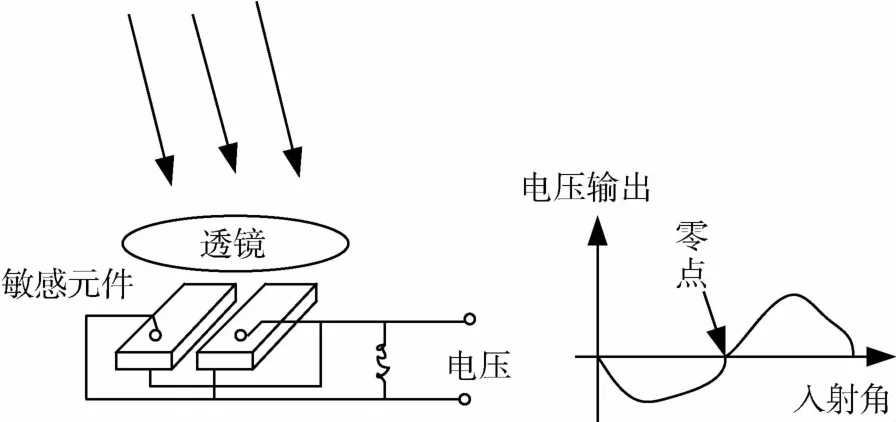
图2 模拟式太阳敏感器工作原理Fig.2 Analog sun sensor operting principle
数字式太阳敏感器的输出信号与太阳入射角之间的关系表现为以编码形式出现的离散函数.如图3左所示,它在结构上主要由狭缝、码盘和光敏元件阵列组成.码盘上设有符号位和编码位.符号位用于确定太阳位于敏感器基准面(定义为狭缝所在平面的法线OC1与狭缝OC3组成的平面)的哪一边,即入射角正负.编码位用于确定太阳光线偏离基准面的数字量,即太阳入射角大小.
如图3中所示,光敏元件阵列是由一排相互平行且独立的光电池条组成,其数量决定了太阳敏感器输出编码的位数,从而在一定程度上影响到敏感器的分辨率[6].
如图3右所示,当太阳光通过码盘照到某一条光电池上产生电流并且超过给定的门限值时,输出为1,反之输出为0.因此整个光电池阵列可输出一个二进制码,确定太阳光线在光电池阵列上成像的位置,即对应太阳方向与OC2的夹角[6].
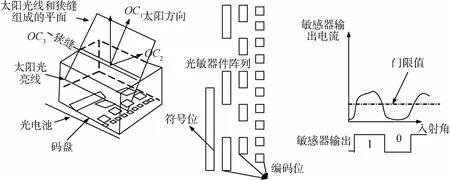
图3 数字式太阳敏感器工作原理Fig.3 Digital sun sensor operting princip le
2.2 间接法
直接法的实现原理显然简单,但是其精度却难以满足卫星姿态控制系统日益提高的要求,并且容易受到地球反射光等其它光源的干扰从而产生误差.因此,采用成像器件(CCD或CMOS)的敏感器得到了很大的发展,并且此类器件能够满足越来越高的质量轻、功耗低、精度高、模块化等要求.与直接法通过余弦函数或离散对应关系一步得出结果不同,它是先通过提取太阳在传感器面的影像以避免把任何可能的光误认为太阳入射光,再计算其光心相对传感器中心位置的偏差来求得太阳角度.
2.2.1 提取太阳影像[7]
可以通过以下几种或者全部来确定待识别影像是否为太阳投影:
1)形状特征提取.根据先验知识,太阳光斑在图像中的最大长与宽比近似等于1,利用高亮度区域不同的长宽比值不超过一定范围进行区分.
2)面积特征提取.在敏感器镜头参数和曝光时间已定条件下,太阳光斑区域所占面积大小基本不变,可利用其面积值不超过一定范围进行判别.
3)动态偏移辅助特征提取.依据太阳移动规律和航天器运行规律,其位置变化量应在一定范围内.因此可验证根据当前高亮度区域中心坐标(mi,ni)与前一时刻中心坐标(mi-1,ni-1)的偏移量:

是否在一定范围之内.
2.2.2 计算太阳中心
一般来说,太阳在传感器面上的投影总有一定的尺度,会覆盖几十个至几百个像素,并且不一定为规则圆形,因而如何精确求得投影中心位置便成为精度关键.目前比较常用的求取算法有最大值法、二值化方法和“质心”法[8].最大值法就是取输出电压值最大的像素为中心,其优点是算法简单,缺点是受噪声影响大,电压值最大像素一般不唯一,几乎不采用.二值化求中心法是先取一个固定阈值或是浮动阈值,然后求得投影区域的四个边缘,最后求中心,其优点也是算法简单,精度比最大值法高,但它的精度依赖于输出信号的对称性和均匀性,当信号不满足对称条件时,二值化信号的中点并不代表光心位置,其精度有限;当信号不均匀时,可能在一个轴上不只是得到两个前后沿,因而得不到准确的中心位置.“质心”法实际上是基于平面几何中求实体重心的原理来实现的,将投影区域看作一个实体,像素则为最小的计量单位,其像素电压值为它的权重,可假设投影区域有 m行 n列,便得如下的中心计算公式:
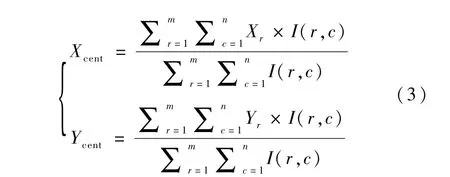
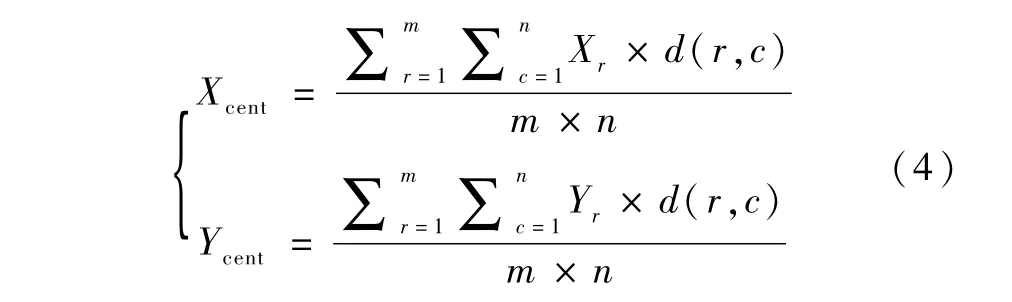
其中:Xcent和 Ycent表示最后求得的中心坐标,(Xr,Yr)表示r行c列上像素的坐标;I(r,c)表示第r行c列上像素的电压值.这种方法的优点是精度高,可达到亚像元分辨率,但算法却比较复杂.对于某些计算能力较低的平台可能不适应,可在允许降低一定精度的情况下采用如下简化算法.
取固定阈值,像素值大于此值可认为是太阳光线投影点,记为1,反之记为0,用d(r,c)表示.计算公式如下:
3 实际应用
上文阐述太阳跟踪和定位的基本分类和原理,但在实际应用中为了提高精度、扩大视场或提高抗辐照可能采用以下改进措施.
3.1 多孔复用平均[8]
如图4左所示为入射面的俯视图:在此面上开设多个入射小孔.此方法的基本思想就是通过多个小孔来复用整个敏感器面阵列,每个小孔负责一定的视场,求出太阳经每个孔成像的“质心”坐标,用平均算法得到太阳的最后实际坐标.
在一定视场的前提下,通过多个小孔来分担总视场,即每个入射小孔负责的实际视场变小,从而能够在已定探测器和总视场的情况下提高系统分辨率,最终实现精度提高.如图4中所示,对应太阳光束经过三个孔在敏感面上的投影真实位置分别为3.2,8,12.8(以像素为单位),而计算时采用像素中心位置,即3.5,7.5,12.5处,求平均(3.5+7.5+ 12.5)/3=7.83,比只有中间一孔时的值7.5更接近于真实值8.同时,采用多孔也能避免单孔时因温度等客观偶然因素而影响最终结果,降低随机误差,提高数据稳定性.
但是这会增加电路部分数据处理的复杂度:当太阳光在敏感器面上同时通过多个小孔时.就必须确定敏感器面上的像分别是由哪个入射小孔造成.据实验统计(喷气推进实验室曾做过该实验),多孔太阳敏感器的精度正比于开孔总数的平方根.然而每多开一个孔,需要处理的数据量就要增加一倍,算法也会更复杂.
另外可将边孔开取降低增加视场.如图4右所示的 开取三层孔的光学球面罩,其中1、2、3、4为第一层,5、6、7、8为第二层,9、10、11、12为第三层.
在实际应用中,由于渐晕区[9]的存在(如图5),特别是在大视场角的情况下太阳光线经各孔的投影图像相互交叠形成明暗条纹,造成方法失效.为减小渐晕区,可在小孔处加微透镜[10].
3.2 太敏光纤导入技术[11]
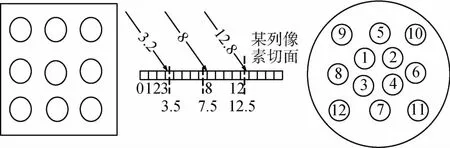
图4 多孔复用及精度分析Fig.4 Porousmultiplexing and accuracy analysis
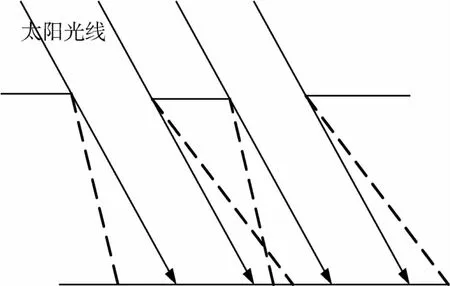
图5 渐晕Fig.5 Vignetting effects
由于需要接受光照,太阳敏感器必须安装于航天器外表面.太空中的恶劣温度环境和宇宙高能粒子的轰击危险可能造成传感器的永久损坏.如果提高传感器的温控和抗高能粒子破坏的等级,势必增加成本.
如图6采用光纤导入.使得原先暴露在太空中的脆弱光敏器件得以安置在卫星内部,从而完全避免了受太空中高能粒子轰击而永久损坏的可能.其结构简单、成本低廉,将会在今后的航天器上或日常生活中得以应用.
该方法由于引入光纤,加之使用余弦检测器会引入大量误差.因此要实现上述应用,还需对其测量精度做进一步的研究与探讨.
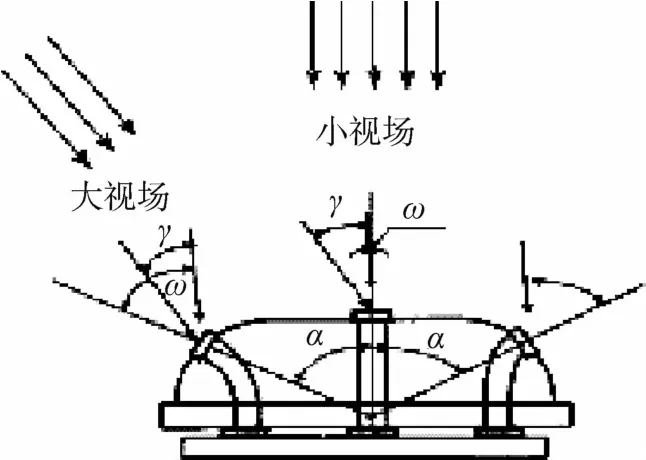
图6 光纤导入Fig.6 Optical fiber introduced
4 结束语
本文所提到的分类总结如表1所示.
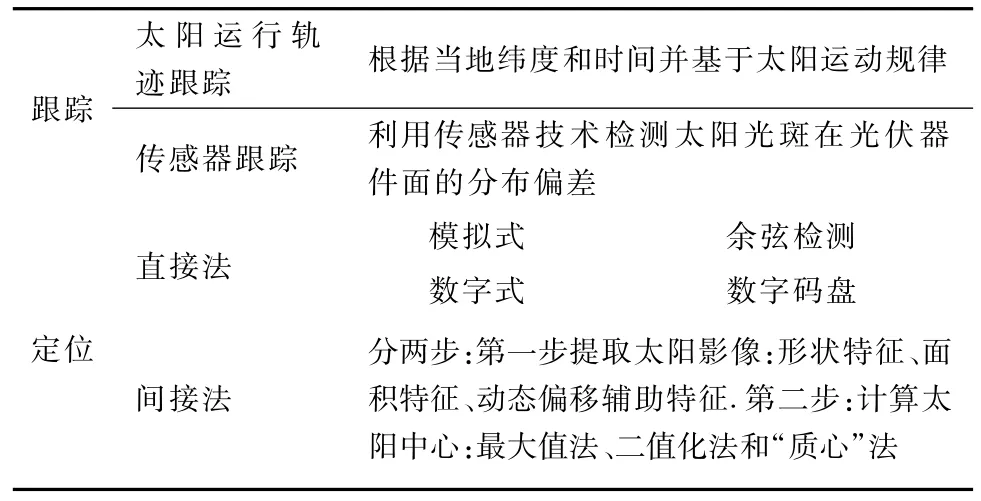
表1 太阳跟踪定位分类Tab.1 Classfication of sun tracking and positioning
目前来说,精度、计算复杂度、寿命和视场是衡量太阳跟踪定位技术优劣的主要评价因素,其中精度、计算复杂度是最值得关注的两点.太阳跟踪和基于光电池的太阳定位技术已经相当成熟,而随着图像传感器技术的发展,辨识太阳计算其中心的间接法还有很大发展空间,将来会成为研究主流.
其中辨识太阳和求取中心的算法并不是难点,关键在于敏感器硬件的设计和生产.中国关于敏感器的技术研究已经十分丰富但敏感元件的制作工艺落后成为限制敏感器技术发展的瓶颈.研究人员要时刻关注国外的发展动态和最新产品信息,因此将如何进一步改善敏感元件的制作工艺作为研究重点并将微处理技术更好地应用于敏感器的研制,提高敏感器性能,使其更好地为中国的各项事业服务[12].
[1] 窦伟,许洪华,李晶.跟踪式光伏发电系统研究[J].太阳能学报,2007,28(2):169-173 Dou W,Xu H H,Li J.Analysis of solar PV tracking system[J].Acta Energiae Solaris Sinica,2007,28(2): 169-173
[2] 汪芳,刘建国,高闽光,等.用于FTIR大气成分监测的太阳跟踪系统设计[J].应用光学,2009,30(5): 792-796 Wang F,Liu JG,Gao M G,et a1.Design of sun tracking system for FTIR monitoring of atmospheric composition [J].Journal of Applied Optics,2009,30(5):792-796
[3] 朱志红,陈为,毛行奎.自动太阳跟踪器综述[C].中国电源学会第18届全国电源技术年会,厦门,2009 Zhu Z H,Chen W,Mao X K.Automatic solar tracker overview[C].Power Institute of China 18thNational Power Tech Annual Meeting Proceedings,XiaMen,2009
[4] 吕文华,贺晓雷,于贺军等.全自动太阳跟踪器的研制和应用[J].光学精密工程,2008,16(12):2545-2550 Lv W H,He X L,Yu H J,et a1.Development of fullautomatic solar tracker and its applications[J].Optics and Precision Engineering,2008,16(12):2545-2550
[5] 李辉.基于CMOS相机的微卫星数字式太阳敏感器研究[D].浙江大学,2010 Li H.M icro research of digital sun sensor on micro satellite based on CMOS camera[D].Zhejiang University,2010
[6] 周军.航天器控制原理[M].西安:西北工业大学出版社,2001 Zhou J.Spacecraft control principle[M].Xi'an: Northwestern Polytechnical University Press,2001
[7] 徐晓冰,王建平,张崇巍等.聚光系统中太阳位置的鱼眼图像识别[J].计算机辅助设计与图形学学报,200 8,20(3):356-360 Xu X B,Wang J P,Zhang CW,et a1.A fish-eye image based approach for solar orientation recognition in ray-condensing system[J].Journal of Computer-aided Design&C Computer Graphics,2008,20(3):356-360
[8] 陈凡胜,朱鸿泰.基于DSP的APS太阳敏感器[C]. 2004年全国光电技术学术交流会,厦门,2004 Chen F S,Zhu H T.DSP-based APS sun sensor[C]. National Optoelectronics Tech Symposium 2004,Xia-Men,2004
[9] Mobasser S,Liebe C C,Howard A.Fuzzy image processing in sun sensor[C].2001 IEEE International Fuzzy Systems Conference,Piscataway,2001
[10] 江洁,温志明,张广军,等.一种高性能太阳敏感器复合光学系统设计[J].光学学报,2008,28(2):343-348 Jiang J,Wen ZM,Zhang G J,et a1.High performance complex optical system design for sun sensor[J].Acta Optica Sinica,2008,28(4):343-348
[11] 李丹,周望,李烨.基于光纤导入技术的太阳敏感器设计与研究[J].光电工程,2011,38(4):66-71 LID,ZHOU W,LI Y.Design and research of the sun sensor based on the technology of the optical fiber[J]. Opio-electronic Engineering,2011,38(4):66-71
[12] 何丽,胡以华.太阳敏感器的原理与技术发展趋势[J].电子元件与材料,2006,25(9):5-7 HE L,HU Y H.Principium and technology development tendency of sun sensors[J].Electronic Domponents&Materials,2006,25(9):5-7
Sun Tracking and Positioning Technique and Its App lications
SHAN Lim ing
(Beijing Institute of Control Engineering,Beijing 100190,China)
Sun tracking and positioning technique iswidely used in areas such as energy,meteorology and space.Related methods is classified systematically and presented comprehensively in this paper.Some newer app lications such as porousmultip lexing and optical fiber introduced etc,in this field are also analyzed.Finally the“bottleneck”problem in this domain is concluded,and the future trend is looked to.
sun tracking and positioning;porousmultiplexing;optical fiber introduced
TP391.41
A
1674-1579(2012)03-0058-05
10.3969/j.issn.1674-1579.2012.03.012
单黎明(1986—),男,硕士研究生,研究方向为空间目标识别与图像处理技术.
2012-02-13