交会对接发动机配置比较研究*
2012-09-05解永春陈长青
王 敏,解永春,张 昊,陈长青
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
交会对接发动机配置比较研究*
王 敏1,2,解永春1,2,张 昊1,2,陈长青1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
介绍执行空间交会对接任务的几个典型的飞船的发动机配置,通过比较,分析执行不同交会对接任务飞船的发动机配置的优缺点,提出了交会对接任务发动机配置设计时需要考虑的因素,并得出一些具有共性的结论,为后续交会对接任务的发动机配置提供参考.
发动机;配置;交会对接
空间交会对接是航天领域一项非常复杂但又十分关键的技术,空间站、大型空间平台的组装以及为这些设施正常运转而补充物资,加注燃料,提供维修服务,都离不开交会对接技术[1-2].
前苏联早在20世纪60年代就开始了空间交会对接技术的研究,近几十年来已经成功进行了一百多次空间交会对接.其开发的联盟号载人飞船[3-4],及其衍生物联盟T、联盟TM、联盟TMA[5],还有后来的进步号、进步M号和进步M1号货运飞船已为空间站运送了多批航天员和物资.欧空局从20世纪80年代开始航天器的交会对接研究和地面试验,并于2008年发射了ATV货运飞船[6-7]与国际空间站(ISS)哥伦布实验舱成功对接.日本在90年代先后两次成功进行了工程试验卫星无人自动交会对接,并于2009年发射HTV货运飞船[8-10]成功地为国际空间站补给了物资.中国多年来也一直在进行交会对接相关技术的研究,并于2011年进行了神舟八号与天宫一号的在轨交会对接试验.
相比其他航天任务,空间交会对接对控制的高精度、多自由度和安全性提出了更高的要求.于是,作为控制系统执行机构的发动机配置就成为关系交会对接任务成败的关键因素之一.相比于一般任务的姿态轨道控制发动机配置,交会对接任务的发动机配置还需考虑多自由度交会机动时发动机的平移和姿态控制能力,在质心变化较大的情况下(如货运船)发动机配置及其控制策略的适应性对组合体的控制能力,以及安装位置对交会对接相对导航敏感器的影响等诸多因素.
本文将通过对联盟飞船、ATV货运船等执行典型交会对接任务的飞船的发动机配置的比较,分析各飞船的发动机配置的优缺点,并给出一些交会对接任务发动机配置设计需考虑的因素,得出一些具有共性的结论,为后续交会对接任务的发动机配置提供参考.
1 交会对接任务的发动机配置
1.1 联盟飞船
俄罗斯联盟号飞船是前苏联最成熟的一种载人航天器,联盟TM是联盟号的升级和替代物,主要执行向和平号空间站和国际空间站运送宇航员工作组的任务.俄罗斯联盟TM载人飞船共有27台发动机[4]:1台轨道控制发动机,推力约2940N,摇摆半锥角为5°;26台姿态控制发动机分成不对称的主、备两路,主路有14台推力为130N的大姿态控制发动机和6台推力为26N的小姿态控制发动机,备路有6台推力为26N的小姿态控制发动机.26台姿态控制发动机中,尾部配置12台,绕质心配置14台.
进步M货运船负责为空间站补充燃料、运送物资和带走废弃物,停靠期间协助空间站进行轨道维持.其推进系统配置、工作原理、主要组件等均与联盟TM基本一致,主要不同是进步M货船发动机数量为29台,比联盟TM多2台小姿态控制发动机.1.2 ATV货运船
欧空局开发的ATV货运船(如图1[11])为ISS补充燃料、运送物资和带走废弃物,是迄今为止已发射使用的运载能力最大的专用货运船.

图1 ATV货运船Fig.1 ATV
ATV的主推进系统包括4台490N发动机,28台220N姿态控制发动机,发动机配置如图2[12]所示.4台490N轨道控制发动机用于自身变轨和国际空间站提升轨道,安装在推进舱底部.28台220N姿态控制发动机中,推进舱后部安装了 20台,用于ATV姿态控制、交会机动、对接前的制动、分离机动以及碰撞规避机动.这20台发动机分为4个五机机组对称安装在推进舱外壁,每个机组上有2台发动机还用于制动,如图3所示[12].另外8台姿态控制发动机分4个双机机组,对称安装在载荷舱的前锥段上,每个机组上含一台主份发动机和一台备份发动机,这些发动机用于增强飞行器的平移控制,如图2所示[12].

图2 ATV货运船发动机配置Fig.2 Thruster configuration of ATV

图3 姿态控制发动机配置Fig.3 Rear attitude control thruster configuration
整个推进系统可分为主份和备份两个对等的部分.任务开始时选择主份工作,一旦主份出现故障,立即整体切换到备份.在任务允许、有时间进行系统重构的情况下,才开展详细的故障检测、隔离和恢复工作.
1.3 HTV货运船
日本的HTV货运船(如图4[10])是一个无人的服务和运输工具,向 ISS运送货物(但不运送推进剂),不具有运输可回收货物返回地面的能力,离轨时从ISS上装载废弃物再入大气层销毁.
HTV的主推进系统包括4台490N发动机,28台110N姿态控制发动机[7-9].4个490 N的主发动机位于推进舱后部,用于轨道机动、离轨和防碰撞. 28台姿态控制发动机用于滚动、俯仰、偏航的姿态控制和交会过程中的平移控制,对接前的制动,分离机动以及碰撞规避机动.推进舱后部安装了16台,分为2个5机组和2个3机组,前端货舱增压部分的外壁安装了12台,分为4个2机组和4个单机组.
1.4 神舟飞船

图4 HTV货运船发动机配置Fig.4 Thruster configuration of HTV
神舟载人飞船(如图5[13])推进舱发动机主要用于完成整船三舱段飞行时的轨道和姿态控制以及返回前的制动和姿态控制.
神舟飞船的推进舱配置了3种28台发动机,4台2500N轨道控制发动机用于变轨控制、返回前的制动以及大气层外应急救生控制时的制动或加速;8台150N大姿态控制发动机和16台25N小姿态控制发动机,通过不同组合可以产生若干种不同大小的控制力矩进行姿态控制.28台发动机采用简单的分组备份,分成完全对称的主、备路,主路、备路发动机种类、台数均相同.主、备路发动机可通过系统自锁阀进行整组切换.

图5 神舟飞船发动机配置Fig.5 Thruster configuration of ShenZhou manned spacecraft
与天宫一号执行交会对接任务的神舟八号飞船,是空间交会对接任务的主动飞行器,其推进舱发动机除需完成上述功能外,还需能完成交会对接阶段的平移控制和姿态控制.其发动机配置在继承神舟飞船推进舱发动机配置的基础上,在质心附近增加了8台117N平移发动机和4台150N反推发动机.
2 交会对接任务发动机配置的比较
由于HTV发动机配置情况尚无详细资料,从整体布局来看与 ATV较为相近,故将神舟飞船推进舱、ATV、联盟TM飞船执行交会对接任务的发动机配置情况进行比较,见表1.
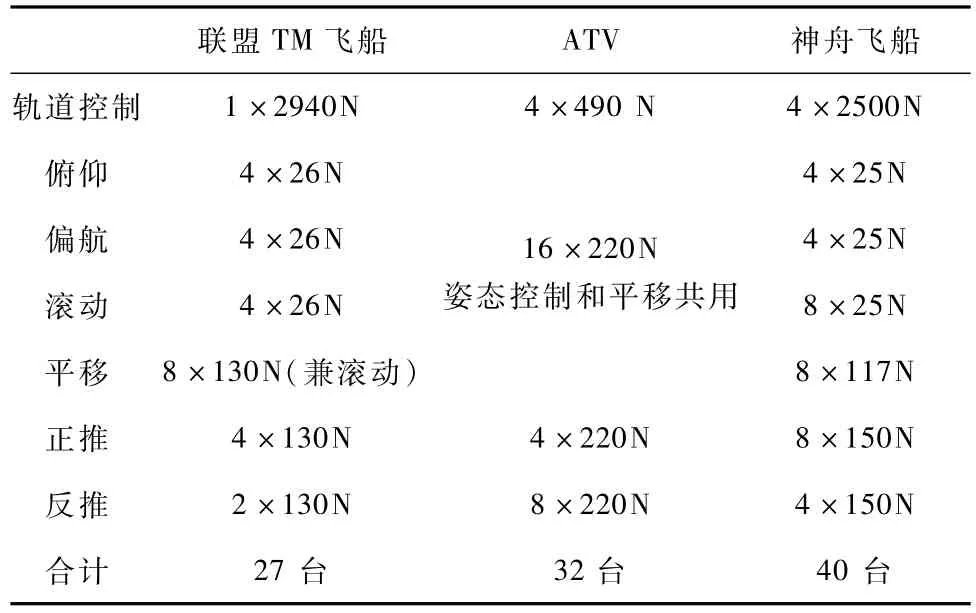
表1 交会对接任务发动机配置比较Tab.1 Comparison of thruster configurations for rendezvous and docking tasks
2.1 轨道控制发动机比较
2.1.1 交会对接轨道控制发动机配置需考虑的因素
交会对接任务的轨道控制发动机选择,在其执行一般任务的基础上还需额外考虑以下几点:
(1)保证远程导引段的制导精度:轨道控制量的大小是影响轨道控制精度的主要因素之一,对于同样大小的轨道控制量,发动机的开机时间增长势必影响轨道控制精度.
(2)交会对接后对组合体的变轨能力:欲提升组合体轨道的变轨能力,则需考虑其对不同的组合体构型所产生的不同质心位置的适应性,即对组合体轨道控制产生的干扰力矩是否有足够的姿态控制能力来进行抵消.
2.1.2 典型交会对接任务轨道控制发动机比较分析
由表1可以看出这几种交会对接轨道控制发动机配置的优缺点如下:
(1)联盟TM
优点:3000N推力发动机的轨道控制能力较强,开机时间较短,轨道控制精度较高;可摇摆过质心,对不同组合体构型质心变化的适应性相对较强.
缺点:仅有一台轨道控制发动机,无备份,可靠性较低.
(2)ATV
优点:4台490N轨道控制发动机,变轨和制动时两台为主份,两台为备份,可靠性较高.
缺点:两台发动机开机时轨道控制能力约980N,相对较弱,相同轨道控制量下开机时间长,轨道控制精度较低;对组合体组装过程和货运飞船不同工作阶段带来的质心变化应对能力稍弱,轨道控制发动机工作时,需要打开姿态控制发动机抵消轨道控制发动机产生的干扰力矩,消耗燃料.
(3)神舟飞船
优点:4台轨道控制发动机,其中两台为主份,另外两台为备份,可靠性较高;两台发动机开机时轨道控制能力约5000N,比3000N的摇摆发动机轨道控制能力强,因此相同轨道控制量下开机时间短,轨道控制精度高.
缺点:对不同组合体构型质心变化的适应性比摇摆发动机弱.轨道控制发动机工作时,需要打开姿态控制发动机抵消轨道控制发动机产生的干扰力矩,消耗燃料.
2.2姿态控制和平移发动机比较
2.2.1 交会对接姿态控制和平移发动机配置需考虑的因素
交会对接任务的姿态控制和平移发动机配置的设计,一般需考虑以下几点:
1)满足交会对接对姿态和平移的控制能力要求;
2)对轨道控制发动机的备份能力;
3)对组合体变轨时的姿态控制能力;
4)对于质心变化情况的适应性;
5)发动机的安装布局需考虑发动机开机对交会对接相对测量敏感器以及太阳帆板和红外地球敏感器的影响;
6)主备份配置模式;
7)发动机管路的复杂性;
8)发动机开机控制算法的复杂性;
2.2.2 典型交会对接姿态控制和平移发动机配置比较分析
由表1可以看出这几种交会对接姿态控制和平移发动机配置方案的优缺点如下:
(1)联盟TM
优点:姿态控制和平移发动机有2种共26台,发动机种类数量较少;发动机管路较为简单;采用不对称的主备份分组方案(主路可以单独完成飞行任务,副路只能完成部分功能),可靠性较高;设计GNC分系统发动机控制模式较为简单.
缺点:对轨道控制发动机的备份能力较弱;由于在质心附近装有14台发动机,对质心变化情况的适应性较弱,质心变化后,平移发动机轨道控制需姿态发动机配合完成,平移控制能力也有所损失.
(2)ATV
优点:姿态控制和平移发动机有1种共28台,发动机种类数量较少;由于姿态控制发动机布局在前锥面和后端面,且交会对接时采用了一种新的查表法[11],通过前后多个姿态控制推力器的配合,能适应质心变化较大的情况,便于模块化设计,同时能更高效地实现交会对接位置和姿态的6自由度控制;ATV推进系统虽然也采用完全冗余的主备份方案,但是发动机上游管路设置了多个自锁阀,发动机推进剂管路控制并非按主副路控制,若某个发动机发生故障,可以关闭其上游的自锁阀,不必整路切换,因此系统的冗余度更高.
缺点:发动机控制算法较为复杂;管路系统方案比较复杂,导致系统干质量相对较重.
(3)神舟飞船
优点:用于正推的4台150N发动机对轨道控制备份能力较强;推进系统采用主副路完全备份发动机分组方案,主副路均可单独完成飞行任务(自主交会对接段除外),当一路中发动机发生故障时,可以整组切换至另一路.主、备份发动机安装基本沿主轴对称分布,产生的控制力矩基本相似,设计GNC分系统姿态控制模式较为简单.
缺点:姿态控制和平移发动机有3种共36台,发动机种类数量较多;由于在质心处装有平移发动机,对质心变化情况的适应性较弱,质心变化后,平移发动机轨道控制需姿态发动机配合完成,平移控制能力也有所损失;该安装位置使得平移发动机开机后会带来较大的太阳帆板羽流干扰力矩;进入自主交会对接模式后,当同一控制通道中的一台尾部姿态控制发动机与平移发动机配对工作时,只能由另一台姿态控制发动机提供姿态控制动力,若姿态控制主份或备份发动机故障时,则无法同时完成轨道控制和姿态控制任务.
3 结 论
本文介绍了经典交会对接任务的发动机配置,给出了一些交会对接任务发动机配置需考虑的因素.通过分析,比较了这些典型配置的优缺点,得到了以下具有一定共性的结论:
1)选择轨道控制能力较强的轨道控制发动机,有利于提高交会对接远程导引段的制导精度;
2)对于沿主轴对称配置的发动机配置,发动机数量少可能使控制能力和冗余度稍弱,但发动机控制策略和管路设计较为简单;
3)如果通过发动机斜装来增强耦合则可增强发动机配置的控制能力和冗余度,但同时又会造成管路和控制算法的复杂性;
4)姿态控制推力器安装在质心附近和后端面的安装布局,对于货运船这类不同载货配置下质心变化较大的情况,适应性较差,不利于模块化设计,不如装在前锥面与后端面的安装布局适应性强;
5)发动机安装在前锥面会使发动机管路加长,同时也需衡量其对相对测量敏感器的影响.
总之,交会对接任务的发动机配置是个复杂的问题,需考虑的影响因素很多,应根据任务的具体情况,从飞船整体出发,权衡各种因素选出最适合的方案.
[1] 马婷婷,魏辰曦.空间交会对接概述[J].中国航天,2004(7):33-34 Ma T T,Wei C X.A brief introduction to space rendezvous&docking[J].Aerospace China,2004(7):33-34
[2] 周前祥,联顺国.空间交会对接技术及其发展趋势[J].中国航天,1998(1):25-28 Zhou Q X,Lian S G.The development of rendezvous and docking[J].Aerospace China,1998(1):25-28
[3] Viehbock F.Soyuz-the Russian human transportation vehicle[C].AIAA Space Programs and Technologies Conference,Huntsville,AL,September 27-29,1994
[4] Hall R D,Shayler D J.联盟号飞船[M].周晓飞,张柏楠,尚志等,译.北京:中国宇航出版社,2006 Hall R D,Shayler D J.Soyuz-a universal spacecraft [M].Zhou X F,Zhang B N,Shang Z,et al,version. Beijing:China Astronautic Publishing House,2006
[5] 吴国兴.俄罗斯的新型飞船——联盟TMA(上)[J].国际太空,2003,8:20-24 Wu G X.Russia's new human transportation vehicle-Soyuz TMA[J].Space International,2003,8:20-24
[6] Labourdette P,Julien E,Chemama F,et al.ATV jules verne m ission maneuver p lan[C].The 21stInternational Sympolsium on Space Flight Dynamics,Toulouse France,September 28-October 2,2009
[7] 张艳丽.ATV、HTV与ISS交会对接技术分析[J].载人航天,2010:1-8 Zhang Y L.Analysis on rendezvous and docking techinique of ATV,HTV and ISS[J].Manned Spaceflight,2010:1-8
[8] Tanaka T.H-II transfer vehicle missions and capbilities [R].IAF-99-T.1.07
[9] Kawasaki.On-orbit demonstration and operations plan of the H-II transfer vehicle[R].IAF-00-T.2.08
[10] Satoshi U,Toru K,Hirohiko U.HTV rendezvous technique and GN&C design evaluation based on 1stflight on-orbit operation result[C].AIAA/AAS Astrodynamics Specialist Conference,Toronto,Ontario Canada,August 2-5,2010
[11] Martel F.Optimal simultaneous 6 axis command of a space vehicle with a precomputed thruster selection catalogue table[C].AAS 03-587,AAS/AIAA Astrodynamical Specialist Conference Meeting,Montana,Aug.,2003
[12] Silva N,Martel F,Delpy P.Automated transfer vehicle thrusters selection and management function[C].The 6thESA International Conference on Spacecraft Guidance,Navigation and Control Systems,ESA SP-606,France,2006
[13] 藏家亮.“神舟”号载人飞船推进分系统的研制[J].上海航天,2003,20(5):5-10 Zang J L.The development of the propulsion subsystem of shenzhou manned spacecraft[J].Aerospace Shanghai,2003,20(5):5-10
Com parison of Thruster Con figurations for the Rendezvous and Docking Task
WANG Min1,2,XIE Yongchun1,2,ZHANG Hao1,2,CHEN Changqing1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China; 2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China)
Several typical thruster configurations of spacecrafts for rendezvous and docking task are introduced.Advantages and disadvantages of these thruster configurations are analyzed through comparison. Accordingly,some useful conclusions for the thruster configuration designs are obtained.In addition,some infectors that should be considered when designing a thruster configuration for rendezvous and docking task are also proposed.
thruster;configuration;rendezvous and docking
V448.22
A
1674-1579(2012)03-0042-05
10.3969/j.issn.1674-1579.2012.03.009
王 敏(1981—),女,工程师,研究方向为航天器控制;解永春(1966—),女,博士生导师,研究员,研究方向为空间交会对接和航天器智能自主控制;张 昊(1978—),男,高级工程师,研究方向为空间交会对接;陈长青(1979—),男,高级工程师,研究方向为交会对接的制导方法.
*国家自然科学基金资助项目(90305024).
2011-07-28