网络化舰空导弹超视距协同反导的关键技术
2012-08-27滕克难
滕克难
(1.南京理工大学,南京 210000; 2.海军航空工程学院,山东 烟台 264001)
0 引言
现代海上空袭与反空袭作战中,舰艇编队往往面临来自各种平台上(飞机、舰艇和潜艇)发射的飞航式反舰导弹的严重威胁。随着新技术的应用,反舰导弹射程越来越远;飞行高度越来越低;弹道机动越来越灵活;飞行速度越来越快;抗干扰及突防能力越来越强。特别是防区外发射、低空隐蔽突防和饱和攻击等新战术,要求将编队中多个中、远程舰空导弹系统组建成网络化舰空导弹超视距协同反导防御系统。
1 网络化舰空导弹超视距协同反导防御系统
网络化舰空导弹超视距协同反导防御系统[1-2],基于高速交战(CEC)网络[3],主要由侦察卫星、预警机、舰艇编队和编队C4ISR系统组成,如图1所示。
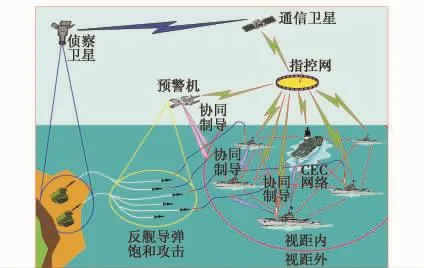
图1 网络化舰空导弹超视距协同反导防御系统Fig.1 Networked ship-to-air missile beyond-visual-range cooperative anti-missile system
网络化舰空导弹超视距协同反导防御系统,按照网络中心战的概念和原理[4-7],一是将“传感器网”、“指挥控制网”和“高速交战网”三网合一,构成多平台协同探测、协同跟踪、协同指挥、协同控制和协同制导网络系统;二是采用“协同探测”、“协同指控”和“协同制导”等三大技术,形成舰艇编队“超视距拦截低飞反舰导弹”的能力。这样,舰艇编队预警、探测距离大大增加,对多目标的跟踪精度大大提高,中、远程舰空导弹有效拦截距离和拦截次数大大增加,舰艇编队超视距反导防御作战能力大大提高。
2 超视距协同反导防御作战系统的特殊性
从网络中心作战角度看,网络化舰空导弹超视距协同反导防御系统,是一个基于编队C4ISR系统的多平台、多雷达、多个指控系统、多个舰空导弹系统构成的一体化对空防御作战系统,并具有一系列的特殊性。
2.1 协同探测与跟踪的特殊性
舰艇平台上单一雷达系统,就其特性而言,在目标距离的测量上是较精确的,但在目标方位角和高低角的测量上存在较多不确定性,解决这一问题的技术途径之一是采用多雷达组网探测技术。
用多部雷达观测一个目标,可以大大降低或消除单一雷达在方位角和高低角测量上的不确定性。然而,多部雷达组网后,由于观测目标的平台数量多,会造成目标航迹生成混乱。因此,给每一个被探测的目标生成一个唯一的目标航迹,使舰艇编队中各平台形成统一的、共享的作战态势图,这是网络化舰空导弹超视距协同反导防御系统的特殊性之一。
2.2 协同指挥与决策的特殊性
按照网络中心战的概念,网络化舰空导弹超视距协同反导防御作战指挥与控制的核心目标,是实现“用合适的舰空导弹,在合适的时刻,拦截合适的反舰导弹”作战目标,这就要求对整个舰艇编队中“分布作战资源”进行指挥和控制。其中,“弹-目匹配(missile-target pairing)”技术,也就是将“反舰导弹群目标”向“多个舰空导弹”进行正确的分配,是网络化舰空导弹超视距协同反导防御系统指挥与控制的难点之一。
在以网络为中心的编队反导防御作战中,每一个平台的传感器和武器在逻辑上都是可以分离的,一个平台上的传感器可以逻辑独立于平台之外被另一个平台的指控系统使用,这样就形成了新的跨平台的武器发射控制系统,即动态地组合构成了“集成火控系统[8](Integrated Fire Control System)”。因此,舰艇编队中基于多平台、多传感器和多武器系统的“集成火控系统”动态构建技术和方法,是网络化舰空导弹超视距协同反导防御系统的指挥与控制的另一个难点。
2.3 协同制导与控制的特殊性
能否充分利用中、远程舰空导弹的全部运动学弹道和射程,实现多平台对多枚舰空导弹的协同制导和控制,也是网络化舰空导弹超视距反导防御系统完成舰艇编队防御作战任务的特殊性之一。主要表现在两个方面。
2.3.1 中制导段飞行弹道相对平直中、远程舰空导弹武器采用“惯性+指令”中制导方式,其中制导段飞行弹道一般采用“高抛弹道”。而在多平台条件下,平台之间的接力制导及其交班控制,要求尽量减小制导系统的动态误差,在三维空间中使飞行弹道保持相对平直,避免S型,如图2所示。这样,既有利于中制导段接力制导及其交班控制,又可以最大限度地减少因导弹机动产生的不必要的能量损失,发挥出中、远程舰空导弹的最大射程。
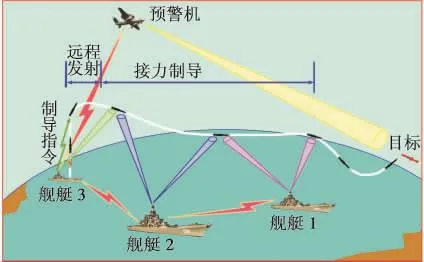
图2 相对平直飞行弹道示意图Fig.2 Sketch map of relatively straight trajectory
2.3.2 中 -末段制导控制精度要求较高
采用“惯性+指令+末制导”复合制导体制的中、远程舰空导弹,其脱靶量主要取决于末制导精度。在中制导段的末端,当导弹和目标之间距离小于导引头的最大作用距离,且目标处于导引头探测搜索扇面内时,导引头开机即可截获目标,实现中-末制导交班。这就要求中-末制导交班时刻的导弹位置、姿态误差以及目标位置误差等在规定的精度范围内。在多平台条件下,各平台制导雷达系统的异构性决定了中-末段制导交班控制的复杂性,而且,对中-末段制导交班控制的精度要求也就高于单一平台下的情况。
3 系统建设思路和关键技术
网络化舰空导弹超视距协同反导防御系统建设,不是从头设计一个新系统,而是将现有多个舰空导弹系统综合集成,生成一个具备新功能的系统,获得“1+1>2”的效果。因此,必须采用“军事需求驱动、体系结构主导”的顶层设计理念,综合运用系统集成为特征的现代系统工程思想和方法,集智攻关破解关键技术难题,充分进行作战背景条件下演示验证,才能确保系统集成建设目标的实现。
3.1 顶层设计的思路和方法
顶层设计是工程实现的前提。网络化舰空导弹超视距协同反导防御系统的顶层设计,一是研究确定军事需求,分析未来海战场空袭与反空袭作战双方攻防体系中装备和技术的发展趋势,在假想条件下提出反舰导弹多批次、多方向、饱和攻击的进攻态势,构建舰艇编队兵力组成和装备配置等防御作战态势;二是研究确定系统体系结构,分析、确定体系结构中网络结构、节点类型、节点内部结构、节点之间的相互关系以及对节点的约束条件,提出适合于舰艇编队的防御作战体系结构及其关键技术。
系统体系结构研究的技术途径,是参照DoD AF系统体系结构设计方法[9],从“全视图(AV)”、“作战视图(OV)”、“系统视图(SV)”和“技术视图(TV)”等4个层面,分析提出作战任务、作战态势、系统构成和技术标准体系,建立部队、监造机构和研制机构3个方面的协调建设机制。总之,网络化舰空导弹超视距协同反导防御作战系统体系结构研究的目的,就是确定多个舰空导弹系统共同协作的体系结构,协调它们的自身能力和作战目标,以求解单个舰空导弹武器系统反导作战无法实现的复杂超视距反导防御作战问题。
3.2 综合集成的思路和方法
从武器装备体系建设看,网络化舰空导弹超视距协同反导防御作战系统,是一个基于“高速火控网络+C4ISR系统”的多个舰空导弹系统组成的复杂装备体系。该装备体系综合集成可以分为3个层面:1)网络层;2)应用层;3)知识层。如图3a所示。
3.2.1 网络层综合集成,实现互连互通
网络层综合集成的目标是建立互连互通的网络系统,为超视距反导作战信息共享提供支持。从网络作战功能看,完成传感器网(sensornet work)、指控网(C2 network)和武器网(shooter network)的综合集成,如图3所示。其中,网络层综合集成的难点是高速武器网(CEC网)的建设。高速武器网是构建“集成火控系统(Integrated Fire Control System)”的基础,它使各个参战单元快速实现互联互通。

图3 3个层面综合集成结构图Fig.3 Integrated structure chart of three layers
3.2.2 应用层综合集成,实现作战能力
应用层综合集成的目标是建立网络化的舰空导弹武器装备体系,为超视距反导作战“硬杀伤”能力提供具体装备应用方案。从装备结构角度看,应用层综合集成强调“传感器-指控系统-发射装置”等作战资源与作战平台的逻辑分离;从协同制导角度看,应用层综合集成强调舰空导弹系统应该具备“惯性+指令+×××”的制导体制,如图3所示,具备“远程发射”、“接力制导”和“远程交战”能力,实现网络化超视距反导作战能力。
3.2.3 知识层综合集成,实现决策能力
知识层综合集成的目标是建立基于网络的C4ISR系统,为超视距反导作战态势分析和决策提供知识管理能力。如图3a所示,网络化、多舰艇平台上的“单一综合空情图(SIAP)”,力求将最恰当的反导作战态势知识,在最恰当的时候,传递给舰艇编队指挥员,使他们做出最好的决策,以便实时地对编队中异构、分布的舰空导弹系统进行指挥,共同完成舰空导弹超视距协同反导作战任务。
总之,网络层、应用层和知识层的3层综合集成并不是分开的,而是有机融合在一起的,如图3b所示。从武器装备体系结构看,网络化舰空导弹反导作战装备体系是一个基于信息系统的,具备异构、分布、协同特点的舰艇编队防空反导装备体系。
3.3 网络化协同反导作战和导弹控制的关键技术
从工程技术应用角度看,网络化舰空导弹超视距协同反导防御系统是一个基于高速数据网络的,具有异构、分布、开放和动态耦合特点的复杂的分布式人工智能控制系统。因此,需要解决下列关键技术问题。
3.3.1 高速数据网络技术
高速数据网络是宽带、实时网络。它不仅具有很高的传输速率,而且具备很强的抗干扰能力和精准的定向性和实时性。主要关键技术包括:1)相对和绝对格网锁定(gridlock)技术;2)传感器数据传输的智能接口技术;3)多波束天线多节点通信技术;4)网络中有限节点最优跟踪信息分发技术;5)宽带和窄带网络数据交换关口链接器技术。
3.3.2 异构型多雷达组网技术
舰艇编队中不同频段、不同体制的异构型雷达协同工作,提升了对小目标、隐身目标、高速高机动目标、低空目标等的探测和跟踪能力,以及整体抗干扰、抗摧毁能力。主要关键技术包括:
1)异构型多雷达优化部署技术;
2)基于信息栅格和点迹融合的雷达组网技术;
3)多雷达动态组合及控制技术;
4)雷达组网条件下的协同探测、远程控制、目标识别、效能评估技术。
3.3.3 多传感器数据融合技术
网络化舰空导弹超视距协同反导防御系统是一个多平台、多传感器、多指控系统、多发射系统的探测、指挥、控制、制导一体化的信息融合系统。主要关键技术包括:
1)时空一致与误差校正技术;
2)目标点迹压缩合并、点迹串行合并等点迹融合技术;
3)多目标跟踪技术;
4)多干扰源定位技术;
5)决策层融合、特征层融合和数据层融合等属性信息融合技术。
3.3.4 网络延时补偿技术
网络化舰空导弹超视距协同反导防御系统中,数据网络将舰艇编队内各作战平台上的探测跟踪系统、指挥控制系统、武器系统整合成统一高效的网络体系,战场指挥员通过网络可以有效地获取快速变化的战场态势并进行判断决策,但是由于物理距离以及其他一些因素,信息通过网络传输时必然会存在延时。数据链延时使得战场场景无法实时再现,这会影响指挥员的判断与决策,同时缩短了决策时间。如果数据链延时过长,还会使空地导弹无法命中目标,因而完全有必要对数据链延时进行补偿[10]。主要关键技术包括[11-12]:
1)延时时间测定技术;
2)目标状态预测技术;
3)基于延时补偿的滤波模型与算法。
3.3.5 多武器系统指挥控制技术
网络化多平台上,武器系统指挥控制中心不是固定的,且具有很强的系统重构性,提高了指挥和控制的可靠性[13]。同时,可根据作战需要和战场态势的变化,指控中心随时动态地将作战资源加入或退出网络化作战系统,明确每艘舰艇上的作战资源是否参加对来袭反舰导弹目标的拦截。主要关键技术包括以下几点。
1)多目标威胁评估技术。
威胁评估是一个连续、动态的过程,它贯穿于整个作战过程,从第一个威胁的出现到所有威胁的消失。威胁评估是编队火力组织的基本依据,一直是编队对空防御研究的重点和难点问题。根据编队整体防御的思想,对目标威胁程度的评判应以其对整个编队的威胁程度来分析。指标体系建立过程中,应突破传统单舰威胁评估观念的局限性,充分考虑到编队中各队列舰相对价值对于目标威胁程度的影响;同时,应充分利用编队所获取的目标信息,在信息类型上,不仅应利用目标的各种传感器信息和电子战信息,而且应综合利用对敌方空袭典型战术、典型编成、空袭作战特点分析所得到的预先知识;在信息时域上,不仅要充分利用实时的目标信息,而且还应该综合考虑目标的历史航迹和战术动作[14];指标量化过程中,应认真分析指标对威胁影响机理,建立合理的量化模型;威胁评估模型的建立应尽量避免引入主观性和盲目性。
2)舰艇编队队形优化配置技术。
平台中心作战模式下,编队之间的信息共享程度很低,只具有在“有限数据链路”下达成的“有限协作”。因此,编队队形配置一般采用疏开配置,确定舰舰间距时,会考虑一定的火力协同与掩护,但这种火力协同与掩护是通过某种“约定”达成“有限协同”[14]。网络化作战模式下,舰艇编队反导作战系统已经实现了态势的共享、武器系统的协同共用,并具备了远程数据发射、远程数据交战、制导接力和射击接力4种新的网络化作战方式,为了使这些能力得以充分发挥,必须重新考虑舰艇编队的队形配置,认真分析网络化作战模式下的队形配置影响因素,确定面对不同目标环境编队的队形(线形、环形、菱形等),以及各影响因素约束下的编队舰舰位置关系模型。
3)多作战节点武器目标分配技术。
舰艇编队网络化作战模式下由于武器系统的协同共用,火力单元变成了发射节点和制导节点(发射节点和制导节点为舰空导弹武器系统的逻辑分解)临时构成的虚拟组织,称为“集成火控系统(IFCS)”,舰艇编队网络化反导作战中,IFCS的组成不是固定不变的,它们能够根据需要解体、重组。IFCS的产生使得目标火力通道的组织突破了作战平台的限制,目标火力通道组织变得多样化、复杂化,目标分配问题变成了集成火力单元与目标的优化配对,也就是“发射节点-制导节点-目标”三者的匹配优化问题[15-16]。
3.3.6 飞行弹道交班控制技术
超视距作战条件下,飞行弹道交班控制是中、远程舰空导弹大空域飞行弹道交班控制。包括“弹道中段接力交班控制”和“弹道中-末段制导交班控制”两个方面的关键技术。
1)弹道中段接力交班控制技术。
弹道中段接力交班控制要求舰空导弹飞行弹道相对平直。影响舰空导弹弹道平直的因素较多,一是系统动态误差和初始航向偏差,可以通过对导弹导引规律和发射装置跟踪规律的合理设计,从原理上解决;二是导弹测量误差和目标测量误差,会随时间的增加而增加,使弹道变得弯曲;目标的机动形式、机动方向和纵向加速度都是随机的,只能依靠控制系统纠正由其引起的偏差。
2)弹道中-末段制导交班控制技术。
弹道中-末段制导交班控制,要求弹上计算机根据导弹和目标之间的相对位置,计算出导引头波束指向。引起导引头波束指向误差的因素很多,目标机动、目标纵向加速度、导弹纵向加速度、导弹的重力、初始航向偏差,都会造成“弹-目视线角速度”产生变化,并引起需用过载的增加。除了初始航向偏差外,其余误差的量值均随时间的增加而增加,到命中点时达到最大,弹道变得弯曲。因此,分析各种误差源对中-末制导交班的影响,分配相关分系统误差范围,就成为弹道中-末段制导交班控制设计的重点工作。
3.3.7 超视距协同反导舰空导弹射击诸元解算技术
射击诸元计算是指挥员进行导弹拦截可行性判断和发射时机确定的基本依据,无论是单平台作战还是协同制导作战,这些参数的解算都是必不可少的,其主要包括舰空导弹的杀伤区、发射区、目标到达发射区近界和远界的时间、预测遭遇点等参数的计算。
4 结束语
网络化作战条件下,舰艇编队反导防御系统的反应速度、抗饱和能力、反隐身能力、抗干扰能力、重组和抗毁能力都得到了大大提高,同时也解决了舰空导弹的杀伤区受制于单个制导平台威力限制的问题。因此,构建网络化舰空导弹超视距协同反导防御系统,既是未来海上防御作战的必然要求,也是舰艇编队防御由平台中心战向网络中心战转型的必由之路。深入研究系统体系结构,综合运用系统集成方法,集智攻关破解关键技术难题,是实现网络化舰空导弹超视距协同反导防御系统的关键。
[1] 李相民,代进进,黎子芬.舰艇编队网络化反导作战系统研究[J].现代防御技术,2011,39(6):63-70,184.
[2] 唐苏妍,张伟,雷永林,等.网络化反导防御系统仿真模型框架研究[J].系统仿真学报,2010,22(7):1654-1659.
[3] MICHAEL J O,DRISCOLL J A.The cooperative engagement capability[J].Johns Hopkins APL Technical Digest,1995,16(4):377-396.
[4] 赵滨江.论网络中心战[M].北京:解放军出版社,2004.
[5] 刘建英,李小龙,王钦钊.国外指挥控制研究现状及启示[J].电光与控制,2011,18(4):56-60.
[6] DAVID S A,JOHN J G,FREDERICK P S.Network centric warfare:Developing and leveraging information superiority[R].USA:CCRP,2000.
[7] JEFFREY R C.分布式网络化作战——网络中心战基础[M].于泉,译.北京:北京邮电大学出版社,2006:18-32,63-89.
[8] YOUNG B W.Future integrated fire control[R].The 10th ICCRTS,2005.
[9] DoD architectures framework working group.DoD architecture framework version 1.5 [R].The United States:Department of Defense,2007.
[10] 陈占海,祝小平.无人作战飞机数据链延时对攻击决策的影响及其补偿[J].科学技术与工程,2011,11(9):2043-2047.
[11] 毛丽艳,姜长生,吴庆宪.空战数据链通信延时产生的影响及其补偿[J].弹箭与制导学报,2005,25(4):949-952.
[12] 吴龙,刘正敏,姜长生,等.基于卡尔曼滤波算法的数据链延时补偿[J].航空兵器,2010(5):14-18.
[13] 滕克难,盛安冬.基于多Agent的网络化舰空导弹系统协同机制研究[J].火力与指挥控制,2009(2):63-65.
[14] 谭安胜.水面舰艇编队作战运筹分析[M].北京:国防工业出版社,2009,4:77,137.
[15] 童幼堂.舰空导弹指挥决策模型及应用研究[D].大连:大连理工大学,2009.
[16] 唐苏妍,朱一凡,葛伟,等.网络化防空导弹体系集中式拦截联盟形成方法[J].系统工程理论与实践,2011,31(2):357-363.
