超视距空战中目标机动意图评估
2012-08-27王利芳聂志强
王利芳, 李 莉, 聂志强
(中国航空工业洛阳电光设备研究所,河南洛阳 471009)
0 引言
在超视距空战中,当作战双方飞机和机载武器性能相当时,谁先敌发现,谁先占据有利攻击位置,谁就能取得制胜的先决条件。为了占据有利攻击位置,正确评估目标机动意图、把握目标机动路线显得非常重要,它是实现占位机动的决策依据。
目标机动意图的评估跟其他领域的评估问题不同,即目标存在对抗,目标为掩盖其真实机动意图而做出一些带有欺骗性质的战术行为,给目标机动意图准确评估带来困难。从国内外研究情况来看,这方面的工作很少有人涉及,因此在目标做出欺骗行为的前提下,机动意图评估的准确方法是目标机动意图评估问题的主要研究方向。本文提出了一种有效的评估算法,并通过仿真验证了该算法的正确性,对工程应用有很大的参考价值。
1 目标机动意图评估算法
目标机动意图评估可以根据测量、估计的目标速度、加速度等运动参数,建立评估模型来实现,一般包括信息获取、特征提取、意图推理等步骤。
针对超视距空战,本文提出一种比较实用的目标机动意图评估算法,该方法的前提假设[1-2]是:1)空战区域在本机的前半球(传感器探测区)展开;2)不论目标机是否发现本机,均认为目标机动都是有目的的机动。
目标机动意图评估算法[3-4]模型如图1所示。

图1 目标机动意图评估模型Fig.1 The assessment model of target maneuvering intention
1.1 目标特征提取
目标特征变量提取主要为目标方位角ψ,目标进入角q,目标航迹角η和目标距离R。其中:目标航迹角η和进入角q预示目标未来可能的运动轨线;目标方位角ψ和目标距离R预示着目标未来的可能意图,即目标欲形成有利于自身的空战态势。参数几何意义如图2所示,具体定义如表1所示。目标方位角和航迹角如图3、图4所示。
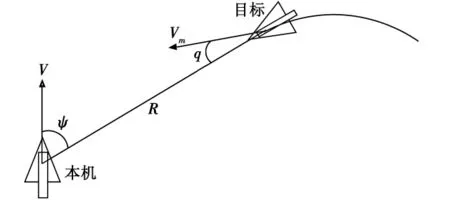
图2 目标机动特征参数的几何意义Fig.2 The geometric meaning of target maneuvering characteristic parameters
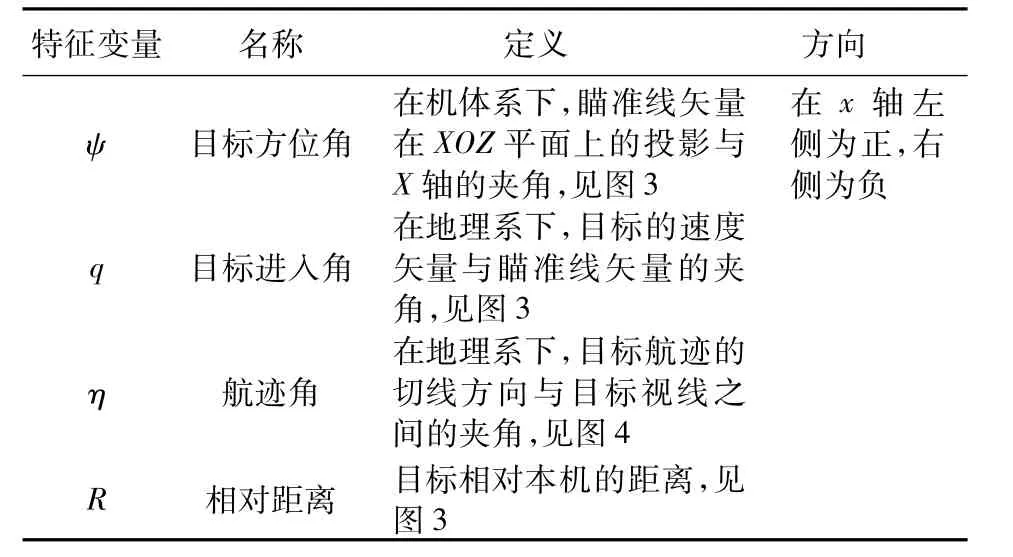
表1 特征变量定义Table 1 The definition of charcteristic parameters

图3 目标方位角示意图Fig.3 The sketch map of target azimuth angle
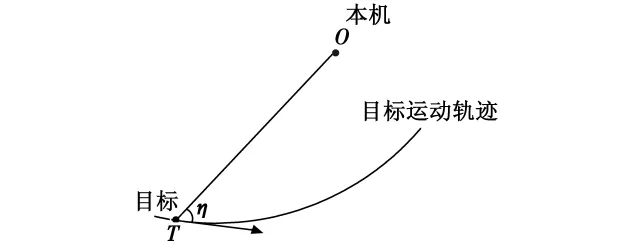
图4 目标航迹角示意图Fig.4 The sketch map of target flight path angle
获得目标方位信息后,判断目标相对本机的大致位置,如图5所示。
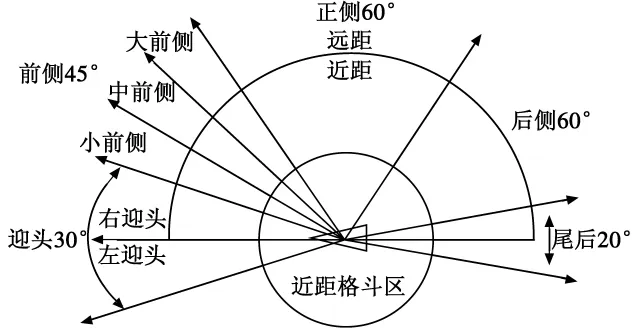
图5 目标相对本机的位置图Fig.5 The target's relative position
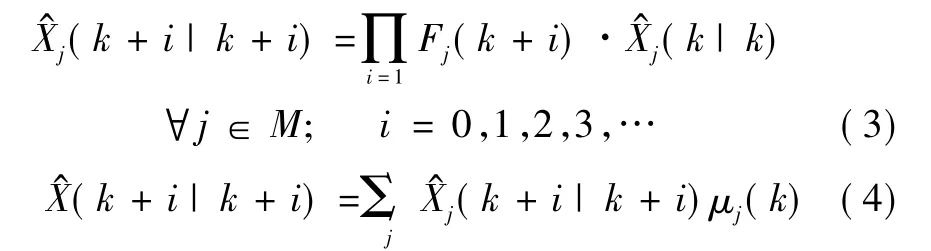
1.2 目标运动预测
要评估目标的机动意图,首先要预测目标的运动参数,文中采用了交互式多模型算法[5-6](IMM)。
在IMM算法中,采用3个匀速转弯模型,一个主模型,两个对称分布的子模型。其中,当前主模型的角速度ω(k)为此时刻估计出来的法向加速度值与切向速度值相除。

以位置、速度、加速度为状态变量,匀速转弯模型对应的二维离散时间系统表达式为

IMM算法的基本框架如图6所示。
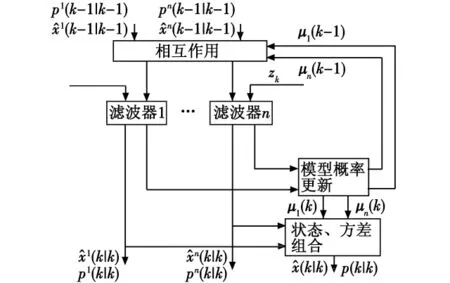
图6 IMM算法框图Fig.6 IMM algorithm
1.3 目标攻击威胁判断
本机指挥控制系统识别出目标为作战目标后,计算目标特征参数,根据目标特征参数计算结果判断,进行攻击威胁判断[3-4]。
1)目标进入角。提取当前时刻t前后的5个进入角信息,若满足|q-180°|<10°,则判断目标有可能攻击本机。
2)目标航迹角。提取当前时刻t前后的5个航迹角信息,若目标机相对本机的航迹角逐渐减小,则目标机有可能攻击本机;当目标对本机无进攻趋势时,其航迹与本机的夹角逐渐增大,甚至超过90°。
3)相对距离。提取当前时刻t前后的5个距离信息,若目标机与本机的相对距离逐渐减小,则判断目标有可能攻击本机;当目标与本机的相对距离小于目标机的有效攻击范围时,则可认为目标机要实施攻击。
只要满足上述条件之一,则认为该目标存在威胁攻击;否则认为不存在威胁。
1.4 目标机动意图评估
依据1.3节的判断结果,若目标对本机有攻击威胁,则进一步评估目标的机动意图,如图7所示。目标机动意图大致分为下列9种:a为迎头逼近;b为左垂直机动摆脱;c为侧向包抄;d为同向摆脱;e为右垂直机动摆脱;f为前侧逼近;g为前侧摆脱;h为前侧包抄;i为后侧包抄。
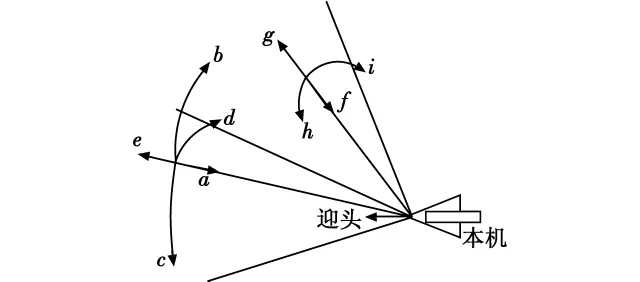
图7 目标机动意图定义Fig.7 The definition of target maneuvering intention
2 仿真结果与分析
为验证目标机动意图算法的正确性,进行了仿真,仿真软件流程如图8所示。
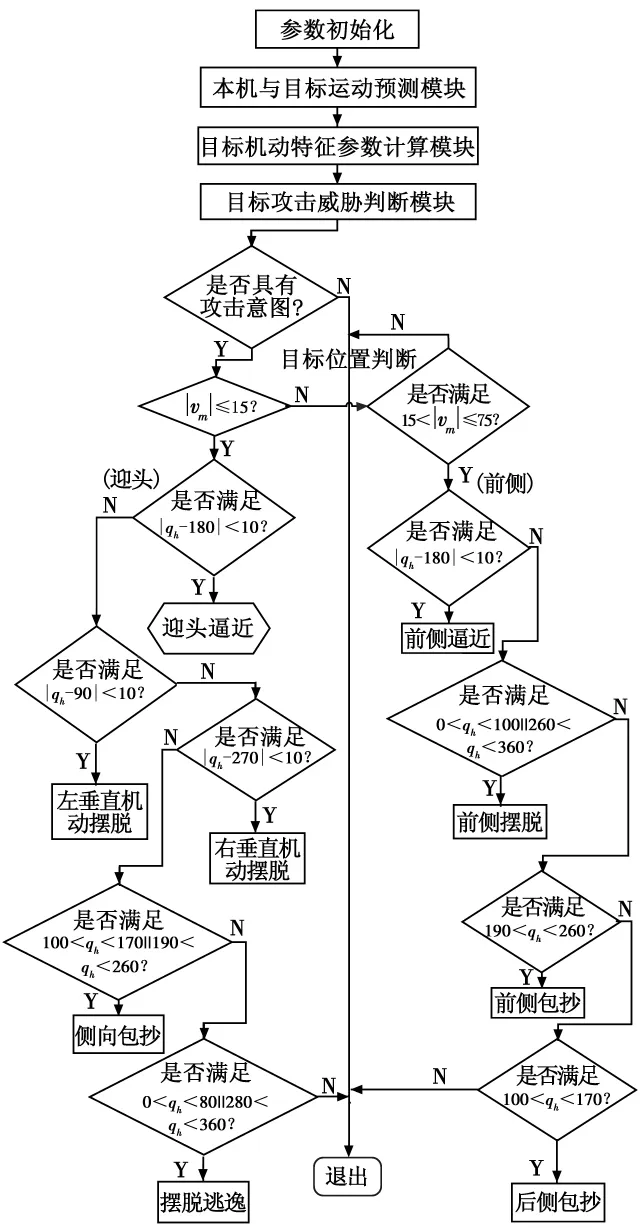
图8 目标机动意图评估流程Fig.8 Flow chart of target maneuvering intention assessment
仿真初始条件:本机做匀速直线运动,Ma数为0.8,航向角为 180°,飞行高度为 5 km,在横轴方向上距离目标130 km,即本机的初始位置为Xm0=130000 m,Ym0=5000 m,Zm0=0 m;目标机的初始飞行Ma数为0.8,航向角为0°,初始位置为 Xm0=0 m,Ym0=5000 m,Zm0=20000 m。
在本仿真中,目标按照空战中常用的迎头规避侧向攻击的战术机动。将仿真过程划分为A、B、C、D、E、F 6个阶段:A段对应时间1~20 s,目标做直线运动,机动意图为迎头逼近;B段对应时间21~28 s,目标向左做大机动转弯,机动意图为迎头左垂直机动;C段对应时间29~50 s,目标做直线运动,机动意图为左垂直机动摆脱;D段对应时间51~55 s,目标向右做大机动转弯,机动意图为右垂直机动;E段对应时间56~86 s,目标做直线运动,机动意图为前侧逼近;F段对应时间87~99 s,目标向右做小机动转弯,机动意图为侧向包抄,仿真画面如图9所示,仿真结果见表2。

表2 仿真评估结果Table 2 The assessment results of simulation
由表2可看出,目标实际机动意图与评估结果相符合,验证了该目标机动意图评估算法的正确性,对工程应用有一定的参考价值。
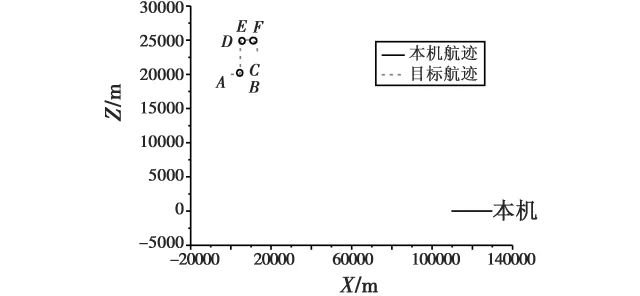
图9 目标与本机飞行轨迹Fig.9 Flight paths of the two sides'aircraft
3 结论
目标机动意图评估算法结合测量、估计的目标运动速度、角速度和机动特征,判断目标机动运动属于哪一种机动意图,通过仿真验证了该算法的正确性,对工程应用有很大的参考价值。
[1] 陆彦.航空火力控制技术[M].北京:国防工业出版社,1994.
[2] 王丕宏,姜长生,杨承.歼击机空战占位的模糊神经网络方法[J].电光与控制,2001,8(3):21-25.
[3] 孙亮,于雷,邹德鹏.Dampster-Shafer证据理论在目标意图预测中的应用[J].电光与控制,2008,15(3):33-36.
[4] 孙亮,于雷,黄文卿,等.改进加权D-S证据理论在目标意图预测中的应用[J].空军工程大学学报:自然科学版,2009,10(1):17-22.
[5] 赵艳丽,刘剑,罗鹏飞.自适应转弯模型的机动目标跟踪算法[J].现代雷达,2003,25(11):14-16.
[6] 徐肖豪,高彦杰,杨国庆.交互式多模型算法中模型集选择的分析研究[J].航空学报,2004,25(4):352-356.
