多轴重型越野车摆振的原因分析及其解决方法
2012-08-21李春风
李春风,刘 伟,唐 伟
(1.湖北航天技术研究院特种车辆技术中心,武汉 430040;2.二炮驻孝感地区军事代表室,孝感 432100)
汽车在行驶过程中,转向车轮有时会发生绕其主销作周期性角振动的现象称为前轮摆振.前轮摆振的时间过长,会增加驾驶员的操纵负担,使驾驶员的注意力及操作的准确性降低,影响汽车的运行安全.此外前轮摆振还增加了行驶阻力、加剧了轮胎的磨损、降低了零件的使用寿命.
关于汽车前轮摆振的研究最早在20世纪20年代由法国开展,之后世界各国围绕汽车前轮摆振进行了大量的研究,取得了一些理论和成果,人们发现了许多影响摆振的因素,并成功地解决了很多车辆的摆振问题.但由于影响汽车摆振的原因非常复杂,迄今为止,还无法用一个完整的数学模型加以精确描述,尤其对于多轴重型越野车更是如此.因此,想要在新车型设计初期对摆振作出控制和预测,目前的技术水平还很难实现.
目前,国内外生产的大量民用车辆,如轿车、客车、货车等车型,在使用一段时间后,都发生了前轮摆振现象.但针对两轴车辆的摆振研究比较多,而对于多轴重型越野车,在国内还未系统地从理论上进行分析研究.因此,只能通过大量试验来研究多轴重型越野车前轮摆振,找到防止摆振的措施.本文基于对汽车前轮摆振相关影响因素的分析和测试,通过对多轴越野车摆振特性测试研究,确定造成车辆摆振的影响因素,通过系统分析和样车试验,找到了解决多轴重型越野车前轮摆振问题的有效措施,从而提高多轴重型越野车高速行驶的操纵稳定性、舒适性和安全性.
1 汽车摆振规律和原因分析
1.1 汽车前轮摆振的规律
汽车前轮摆振分为受迫振动和自激振动.
车轮-转向系统被周期性扰动后,如车轮动态不平衡的激励,便在扰动力持续作用下作受迫振动.当激振力频率与系统固有频率一致时发生共振,它的特征是摆振频率与车轮旋转频率一致.受迫振动发生的车速范围较窄,当车速离开共振范围后,摆振现象将自行消失.
自激振动的主要特点是,车轮-转向系统没有受到外界周期性扰动力作用,而是受到偶然激励.系统一旦受到偶然激励,产生初始偏转,然后借助于系统自身的振动,将振动能量转换成交变的周期性振动.转向轮自激振动能否发生,取决于系统的阻尼特征.如果系统内阻尼足够大,整个系统呈现“正阻尼”,转向轮不发生自激摆振;反之,转向轮便会产生自激型摆振.自激振动一般在低速时发生,且发生的车速范围较宽.
1.2 汽车前轮摆振的原因
汽车是由多刚体、柔体的子系统组成的复杂动力学系统,车轮-转向系统是其中之一,转向轮摆振是一个受多因素、多变量作用的综合结果.国内外研究者对转向轮摆振作了大量的研究工作,发现影响车辆摆振的因素主要有轮胎的特性参数、转向轮定位参数、转向系统的刚度和阻尼,等等.
1.2.1 轮胎的特性参数和转向轮定位参数
研究发现,轮胎的特性和定位参数对前轮摆振的影响非常复杂.轮胎的特性包括气压、负荷、侧向刚度、侧偏刚度,等等,其对前轮摆振的影响见表1.

表1 轮胎的特性和定位参数对前轮摆振的影响[1]
转向轮定位参数包括主销内倾角、主销后倾角、车轮外倾角和前束,各参数对前轮摆振的影响见表2.

表2 前轮定位参数对摆振的影响[2]
1.2.2 转向车轮的动态不平衡
若转向车轮未经良好的动平衡测试,那么,当车轮旋转时,不平衡量便产生离心力,离心力随车轮旋转对前轮-转向系统产生一周期性的激振力.前轮-转向系统在该周期力的激励下发生受迫振动,其振动频率与车轮的旋转频率一致.车轮的动态不平衡是前轮-转向系统发生受迫型摆振的最主要原因,严格控制车轮的动态不平衡量,可消除其对前轮摆振的影响.
1.2.3 转向系统刚度和阻尼
研究表明,适当增加转向梯形机构的刚度,能够降低车辆摆振峰值,但不影响摆振车速.对于不能通过改变结构参数来改善摆振的车辆而言,加装转向减振器是十分有效的解决措施.
1.2.4 驾驶室悬置的刚度和阻尼
驾驶室悬置的刚度和阻尼对摆振没有直接的影响,但若其与悬架系统的刚度和阻尼匹配不合适时,将产生共振现象.前轮发生摆振后,会使摆振效应放大.
2 重型越野车摆振特性研究
测试重型越野车摆振时加速度和位移的传递关系,转向轮绕主销摆动的角度、角速度、角加速度,驾驶室乘员的疲劳工效降低界限.根据测试结果找出越野车摆振的影响因素.
试验采用三轴越野车进行,分空载和满载时摆振测试及不摆振测试,试验时共测试11个点的振动加速度 (包括垂直振动和侧向振动),2个转向车轮转角,测点具体布置见表3.

表3 测点具体布置情况
2.1 空载测试
2.1.1 摆振时振动特性测试结果
在未对越野车进行任何调整的情况下,在良好沥青路面分别以30 km/h、40 km/h、45 km/h、50 km/h、55 km/h、60 km/h、65 km/h、70 km/h、75 km/h的速度匀速行驶时,记录各测点的振动加速度均方根值、一桥左右车轮摆角.试验中,各速度段的记录时间不小于30 s,截止频率50 Hz.试验中,速度大约65 km/h时,人体感觉到越野车产生摆振现象,驶离该速度后,摆振停止.
2.1.2 不摆振时振动特性测试结果
调整越野车转向杆系球头间隙、转向节主销拧紧力矩,增大转向系统阻尼,使之在试验速度范围内不发生摆振,重新试验时试验车速从20 km/h起,以10 km/h为间距,逐渐增加车速直至75 km/h时,驾驶室均未发生摆振现象.调整后记录各测点的振动加速度均方根值、一桥左右车轮摆角.
2.2 满载测试
按空载测试试验流程,重新测试满载状态时的摆振与不摆振的振动特性.
2.3 试验结果分析
2.3.1 摆振发生时的前轮摆角
空载试验中,在车速达65 km/h左右时人体感觉到摆动现象,此时,一桥左轮的摆动幅值为1.92°,一桥右轮的摆动幅值为1.6°.在其它车速时,人体未感觉到摆振现象,此时,一桥左右车轮的摆动幅值基本均小于1°.
满载试验时,在车速达70 km/h、75 km/h左右时人体均感觉到摆动现象,此时,一桥左右车轮的摆动幅值为1.92°左右.
根据上述试验结果可以认为:前轮摆角幅值大于1°时,乘员才感觉到摆振现象,因此,可将前轮摆角幅值不大于1°作为摆振是否发生的定量指标.
2.3.2 摆振发生时车辆的振动情况
比较试验越野车摆振发生时车架、驾驶室前后支撑、驾驶室悬置处各点的振动加速度可见:在试验越野车未调整情况下,在空载时65 km/h处、满载时70 km/h和75 km/h速度处,乘员感觉到明显的摆振,此时各点的振动加速度相对于摆振未发生时显著增加,并出现峰值,如图1~图4所示.

图1 空载未调整时底盘不同位置垂直振动情况

图2 空载未调整时底盘不同位置侧向振动情况

图3 满载未调整时底盘不同位置侧向振动情况
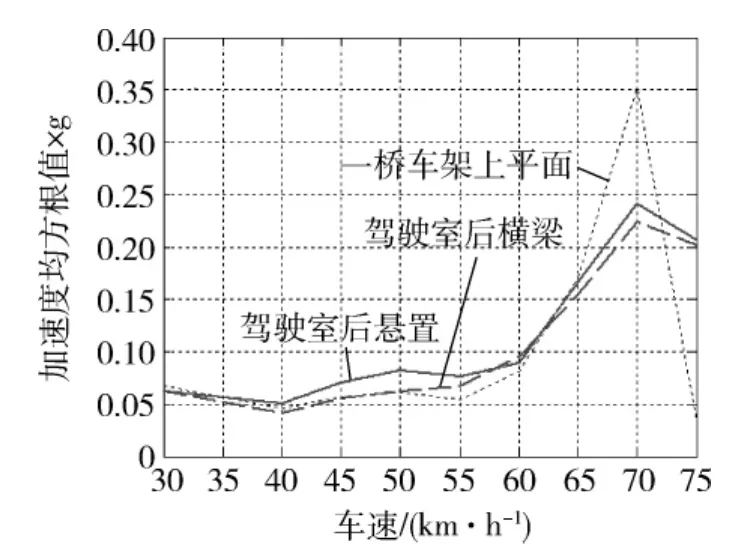
图4 满载未调整时底盘不同位置垂直振动情况
试验越野车经过调整后,在整个试验速度区间乘员感觉不到明显的摆振.调整前空载越野车在速度65 km/h时发生摆振,其垂向加速度均方根值较在60 km/h时增加约188%,侧向加速度均方根值增加约180%;调整后,垂向加速度均方根值增加约45.9%,侧向加速度均方根值增加约24.2%,在试验速度范围内未出现峰值,如图5~图8所示.可见,摆振发生时,越野车驾驶室的振动环境迅速恶化;摆振消除后,振动环境得到明显改善.
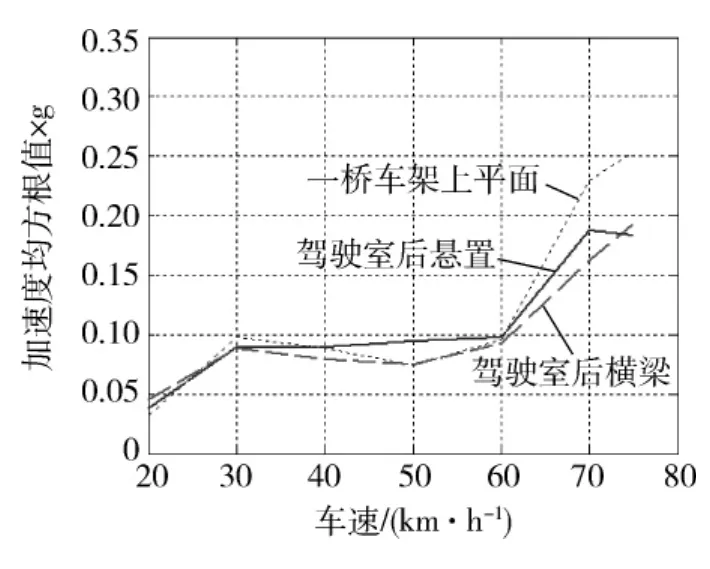
图5 空载调整后底盘不同位置垂直振动情况

图6 空载调整后底盘不同位置侧向振动情况

图7 空载调整前后驾驶室右后悬置垂直振动情况

图8 空载调整前后驾驶室右后悬置侧向振动情况
2.3.3 振动在越野车各部位的传递特性
比较摆振发生时驾驶室前后支撑和驾驶室前后悬置处的加速度值可以看到,驾驶室悬置对来自车架的振动衰减作用很小.因此,驾驶室悬置对摆振的抑制作用很小.
2.3.4 载荷对摆振的影响
比较空载和满载摆振发生时前轮摆角 (见图9)和侧向振动加速度 (见图10)可以看到,载荷增加后,发生摆振的特征车速稍微提高.这主要是由于载荷增加,使前轮轮荷加大,车轮绕主销转动的附加力矩增加,增加了车轮转动阻尼,从而在一定程度滞后了发生摆振的速度.由于试验越野车的摆振属于受迫振动,其振动频率与振源频率一致,当摆振发生时,车轮摆角和摆动频率与载荷无关.

图9 在空载与满载状态下,底盘未调整时一桥左侧车轮摆角对比

图10 在空载与满载状态下,底盘未调整时驾驶室右侧悬置的侧向加速度对比
2.3.5 试验越野车摆振的主要原因
不论是空载还是满载,当越野车摆振发生时,所测试的转向轮摆振频率均为4 Hz左右,此时车速在65~75 km/h之间,车轮的旋转频率为3.96~4.56 Hz,试验越野车的摆振频率与车轮旋转频率基本一致,摆振属于受迫振动.
在调小转向拉杆球销球头间隙 (相当于增大转向系统阻尼)后,车辆侧向和垂向振动都明显减小,乘员基本感觉不到摆振现象,说明增加转向杆系阻尼,可有效抑制摆振的发生.
2.4 测试结论
1)越野车摆振属于受迫振动,在一定车速时开始出现摆振现象.
2)摆振主要来自于前轮摆角,当前轮摆角幅值大于1°时,乘员才感觉到明显的摆振现象.当越野车摆振时,驾驶室振动环境迅速恶化;当驶离摆振的车速区间后,振动迅速减小.
3)越野车的摆振属于受迫振动,摆振的主要原因是转向系统阻尼较小;
4)驾驶室悬置基本对摆振没有抑制作用;
5)载荷大小不影响摆振的强度,但可以改变摆振发生的速度点.
3 解决方案
3.1 解决方法
根据试验测试结论,越野车摆振属于受迫振动,摆振的主要原因是转向系统阻尼较小,如果采取增加转向杆系球头的拧紧力矩,加大转向系统的阻尼,那么能有效抑制转向摆振现象,但加剧了转向杆系的磨损,影响了越野车转向系统的使用寿命.
经调研,如图11所示,采用阻尼止推轴承替代原转向节中的普通推力轴承,能够抑制转向车轮发生摆振现象.阻尼止推轴承是“整体式滑动轴承”,因其摩擦副是用特制材料制成的,且其接触面积是一很大直径的球面,所以能有效地吸收冲击能,且具有耐磨性好、自身润滑优异等特性.阻尼止推轴承的承载能力是普通推力轴承的2.5倍,抗冲击强度是普通推力轴承的3倍以上.其中摩擦副之一的阻尼环具有“强阻尼”特性,在共振区附近,阻尼对振动系统动特性影响最大,放大系数随着阻尼的增加而变小.阻尼另一重要作用,就是改变强迫振动和激振力间的相位角.由于具有大阻尼,对前轮所产生的振动,在转向节处即被有效的“强阻尼”阻尼并吸收.因此,阻尼止推轴承可以有效抑制摆振时产生的高频振动.

图11 转向车轮换装阻尼轴承前后的状态对比
3.2 验证试验
3.2.1 三轴车试验验证
在转向车轮上安装阻尼止推轴承,并进行1万多公里的行驶试验,行驶路面包括良好路面、山区公路、越野路面、凸凹不平路,等等.具体试验情况为:试验越野车分别在60 km/h、65 km/h、70 km/h和75 km/h左右车速下行驶,检查越野车无摆振现象,驾驶员亦无摆振感.
3.2.2 五轴车试验验证
3.2.2.1 对比试验
1)转向车轮未安装阻尼止推轴承.在试验过程中,车辆从50 km/h的速度开始逐渐提高直至70 km/h.当速度为50 km时,驾驶室成员感觉不到摆振;当速度达约60 km/h时,开始摆振,乘员感觉明显的左右摇晃;驶离该速度后,摆动停止.试验中记录了50 km/h(不摆振)与60 km/h(摆振)时的车轮转角数据,见表4.
2)转向车轮安装阻尼止推轴承后.在试验过程中,车辆从50 km/h的速度开始逐渐提高直至70 km/h,驾驶室成员感觉不到摆振.试验中记录了60 km/h(摆振)时的车轮转角数据,见表4.
由表4可见,车轮转向节安装阻尼止推轴承后,有效抑制了转向轮摆振现象.

表4 车轮转角测试数据
3.2.2.2 转向轻便性
越野车转向车轮安装阻尼止推轴承后,进行了转向轻便性测试,测得操纵力矩只有8 Nm.说明转向车轮阻尼止推轴承对转向轻便性无任何影响.
3.2.2.3 转向回正性能
越野车转向车轮安装阻尼止推轴承后,进行转向回正性能测试,无影响.
3.2.3 拆检分析
从阻尼止推轴承 (见图12)检测结果看,外壳边缘与止推环的高度差减小了0.05~0.1 mm.表明在10 000 km行驶过程中,阻尼止推轴承有了一定的磨损,阻尼环约磨损0.05~0.1 mm,但阻尼轴承的使用效果仍然显著,在各种路面、车速条件下,从未出现摆振.

图12 阻尼止推轴承
阻尼止推轴承在重型越野车上的使用寿命是:极限磨损不大于1 mm,使用里程不大于20万公里.
3.3 试验结论
从试验结果看,转向车轮安装阻尼止推轴承后,对越野车转向轻便性无影响,对转向回正性能基本无影响,证明阻尼止推轴承非常有效地解决了越野车摆振问题.
4 结论
在对多轴重型越野车摆振的规律和原因分析的基础上,通过对越野车各部位振动情况的测试,发现该型多轴重型越野车摆振属于受迫振动,发生摆振的主要原因是转向系统阻尼较小.最终通过在转向车轮上安装阻尼轴承的方法,非常有效地解决了越野车摆振问题.该解决方法成本低廉,而且对车辆转向轻便性、回正性能基本无影响,可在国内外多轴重型越野车上推广应用,具有较高的应用价值.
采用换装阻尼止推轴承解决车辆摆振的方法,主要是通过高频振动时轴承的阻尼作用抑制车辆摆振,并没有从根本上消除.后续需建立准确的车辆摆振模型,开展相关理论研究,以求从根本上解决多轴重型越野汽车转向轮摆振的问题.
[1] 刘 青,郭孔辉.基于轮胎侧偏频率响应的汽车摆振分析 [J].中国机械工程,1999,(2):18-21.
[2] 李 胜,林 逸.汽车转向轮摆振研究 [J].汽车技术,2004,(11):16-19.
