履带车辆机电复合传动耦合机构数学特征的研究
2012-08-21韩政达马晓枫盖江涛
韩政达,毛 明,马晓枫,盖江涛
(中国北方车辆研究所,北京 100072)
现阶段履带车辆机电复合传动典型方案主要有双侧电机方案、横轴式方案、多模式混联式方案,其特点为:
横轴式方案属于串联式,他有2个电机,一个较大的直驶电机提供直驶功率和转向平动功率,一个较小的电机提供转向转动功率,具有很好的直驶稳定性和转向性能,并能实现转向时的机械功率回流.但是横轴的存在使得其体积和布置灵活度受到限制.
双侧电机方案属于串联式,由2个电机分别独立驱动两侧的主动轮.发动机与车辆主动轮柔性连接,在空间布置上比较灵活,但两侧电机间无机械连接,无法实现转向机械功率回流,直驶稳定性对控制系统的要求也较高.
多模式混联式方案是将发动机与2个或多个电机通过行星排三构件有机结合在一起,使电机与发动机均能工作在高效率区间,车辆也能实现较宽范围的无级变速.但发动机与主动轮间有机械连接,空间布置不灵活,而且多模式行星机构只是解决了直驶分路,仍然需要采用单独的换挡机构及转向机构,使体积重量增大,控制也较复杂[1-4].
结合以上分析,如果能找到一种方案既能充分发挥各方案优点,又能避免各方案的缺点,是研究者对新方案的普遍追求.即新方案应兼具如下特点:采用串联式,使发动机与主动轮间无刚性连接,增加空间布置灵活性;挡位尽可能少,减少操纵件数量,降低操纵控制复杂性;直驶功能与转向功能有机耦合,无需单独的转向传动分路;采用2个相同的电机 (左右两侧各一个),既满足可行性与经济性,又便于控制.
满足上述新方案要求的关键是寻找一个如图1所示的耦合机构,具有双输入双输出且对称的特性,自由度为2.其中,n1,n2为输入转速,T1,T2为输入扭矩,x1,x2为输出转速,M1,M2为输出扭矩.
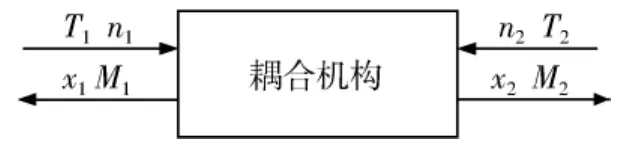
图1 耦合机构的输入输出
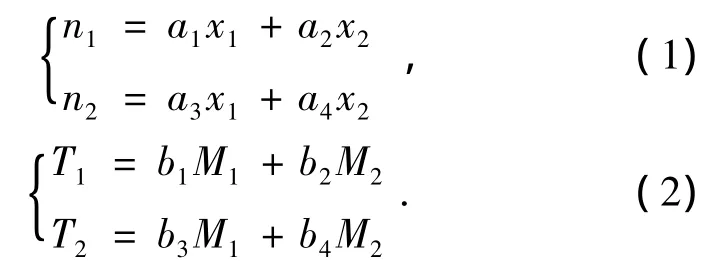
不论耦合机构的内部结构组成如何,根据数学理论,一定存在不为 0 的实数 a1,a2,a3,a4,b1,b2,b3,b4,使输入输出有如下线性关系:
1 耦合机构的对称性
车辆的行驶工况要求耦合机构具有对称性.
对于直驶工况,当x1=x2时,有n1=n2.
代入式 (1)可得:

对于中心转向工况,当 x1=-x2时,有n1=-n2.
代入式 (1)可得:

联立式 (3)与式 (4),可得:

于是,式 (1)可化简为:

2 耦合机构的扭矩平衡特性
耦合机构在只受到输入轴与输出轴的扭矩作用下稳定运行时,由机构内部各构件的加速度为零可得耦合机构处于静力平衡状态.即输入轴在轴向所受扭矩与输出轴在轴向所受扭矩大小相等.即

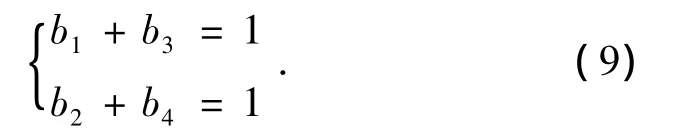
将式 (2)代入式 (7),可得


即
3 耦合机构的功率平衡特性
在不考虑耦合机构内部功率消耗的情况下,机构的输入功率与输出功率大小相等.即

将式 (2)与式 (6)代入式 (10),可得:
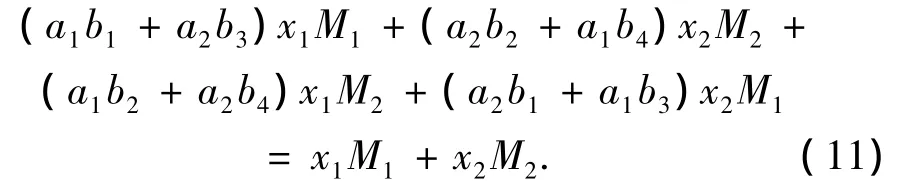
化简可得:
联立式 (9)与式 (12),可解得:
于是,耦合机构的输入输出扭矩与转速关系可以进一步化简为:
至此,耦合机构的输入输出关系均表示成只与a1有关的表达式,如式 (15)与式 (16).耦合机构实现方案的不同体现在参数a1的不同;任何满足新方案要求的耦合机构必然满足上述条件,这是耦合机构可行的必要条件.
4 结束语
提出了履带车辆机电复合传动新方案应具备的特点,其既能发挥现有各方案的优点,又能避免各方案的缺点.根据耦合机构的3种特性,指出满足新方案要求的耦合机构必备的数学特征,将其输入与输出的关系表示为只与参数a1有关的表达式,从而可用于耦合机构的寻找以及判断其是否可行.
[1] 孙逢春,张承宁.装甲车辆混合动力电传动技术[M].北京:国防工业出版社,2008.
[2] 闫清东,赵连第,赵毓芹,等.坦克构造与设计(下册)[M].北京:北京理工大学出版社,2007.1.
[3] 臧克茂,廖自力,李 华.坦克装甲车辆电传动总体技术的研究 [J].车辆与动力技术,2007,(1):5-11.
[4] 廖自力,马晓军,臧克茂,等.履带装甲车辆电传动方案比较分析 [J].兵工学报,2006,(7):583-586.
