电驱动车辆动力学综合控制目标优化研究
2012-08-21韩雪峰范晶晶
韩雪峰,肖 磊,范晶晶
(中国北方车辆研究所,北京 100072)
电驱动车辆具有驱动形式灵活、扭矩响应快速准确等特点.在车辆动力学综合控制系统研究中,如何设计合理的横向动力学控制目标,是优化动力学性能的基础性关键技术.
国内外对电驱动车辆横向动力学控制目标的研究较为深入[1-2],如在目前普遍采用的线性二自由度车辆模型上,选取横摆角速度稳态响应为控制目标来改善车辆机动性[3],范晶晶设计的双重转向控制目标对提高车辆低速转向机动性效果明显[4].Bosch公司开发的VDC系统采用车辆质心侧偏角为控制目标,改善了车辆高速稳定性[5].但是目前尚没有检索到在全车速工况下来设计控制目标的相关技术文献.
本文在分析4×4全轮独立电驱动 (每个车轮装一台可独立控制的电动机)车辆动力学特性的基础上,以提高车辆全车速工况下的动力学性能为目的,通过研究双重转向 (车轮偏转与左右差速)、机动性和保证稳定性的控制参数,设计了基于模糊逻辑的控制目标融合算法,得到了全车速工况下的动力学控制目标.利用15自由度车辆模型,针对不同路面附着系数、不同转向操作、不同车速工况条件,对控制目标的实际效果进行了仿真研究.
1 控制目标研究
全轮独立电驱动车辆动力学控制目标设计流程见图1.由车辆动力学状态观测器实时计算状态参数,包括车速、质心侧偏角、路面附着系数、各方向加速度,等等,在此基础上分别计算双重转向、机动性控制目标和稳定性控制目标,通过设计的模糊逻辑调整函数,对上述控制目标进行融合,最后获得全车速工况下的动力学控制目标.
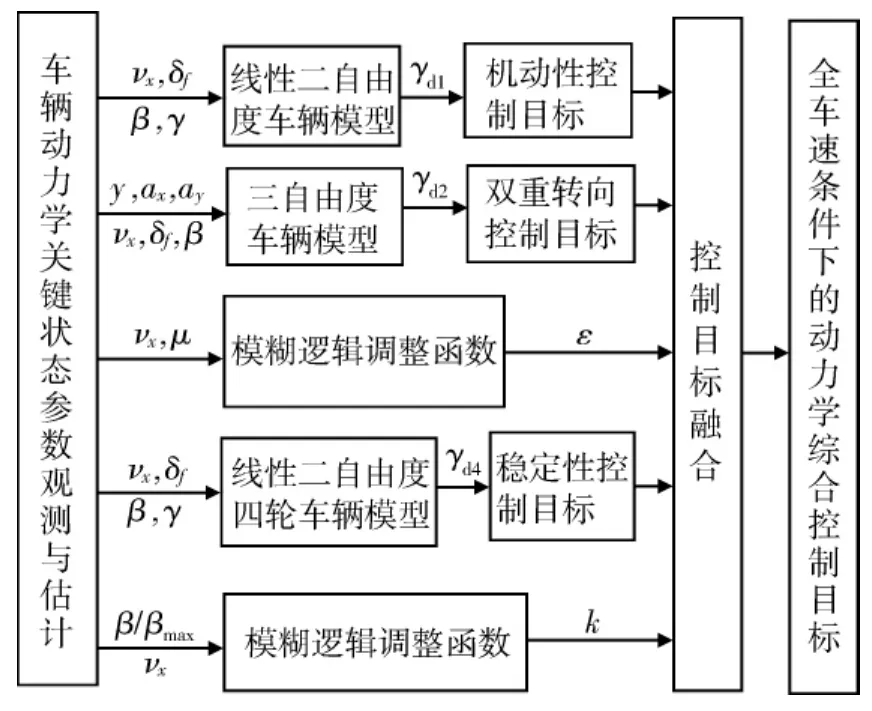
图1 动力学控制目标设计流程
1.1 常见动力学控制目标
双重转向控制是提高车辆低速机动性的有效手段[2],能有效地减小转向半径,双重转向控制目标采用三自由度车辆模型,计算得到的控制目标如式 (1)所示.
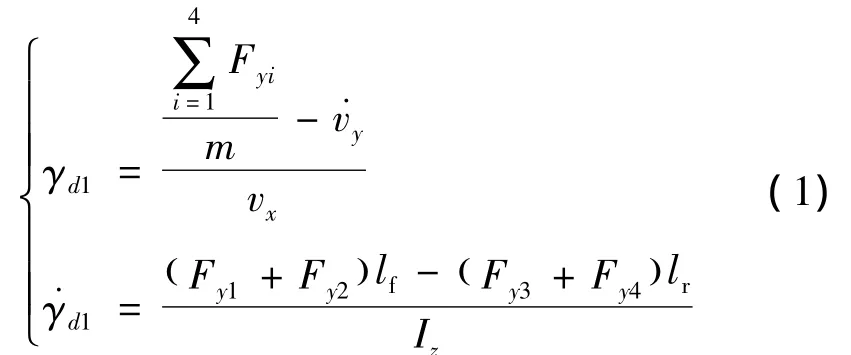
式中:Fyi为各轮纵向力;lf和lr分别为质心到前轴中心线和后轴中心线的距离;vx为纵向车速;Iz为车辆绕z方向的转动惯量;˙vy为车辆侧向加速度.
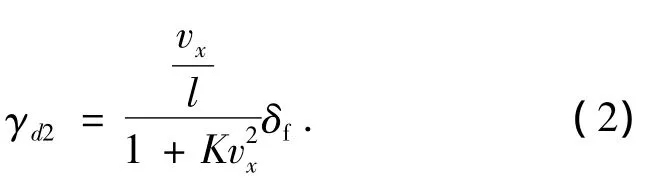
机动性控制目标采用线性二自由度车辆模型,可以体现车辆在转向过程中的机动性特征,控制目标见式 (2).
为了使控制目标在表征车辆横摆运动响应时能包含一定的动态特性,在式(1)和式(2)的基础上引入一阶滞后环节后,所得到的控制目标见式(3).

车辆运动的稳定性是车辆行驶安全的关键因素之一,通过设计一种线性二自由度四轮车辆模型,来研究由纵向力形成的直接横摆力矩对动力学特性的影响.将质心侧偏角的稳态响应目标值设定为0,由此得到的横摆角速度的稳态响应值作为稳定性控制目标,见式(4).

1.2 基于模糊逻辑的控制目标的融合
根据车辆在不同车速下的运动特性分析,当车速低于20 km/h时,双重转向能够有效地减小转向半径,并使得车辆侧滑更容易控制.当车速介于20 km/h到50 km/h之间时,应该兼顾机动性和稳定性的需求.当车速高于50 km/h时,必须采用稳定性控制目标,以保证车辆运动的安全性.
根据车辆动力学特性,采用纵向车速和路面附着系数调节中低速控制目标,融合双重转向和机动性控制目标,得到中低速控制目标,见式(5).

根据动力学特性和驾驶员需求,设计了相应的隶属度函数和模糊规则,采用Mamdani推理方法进行模糊逻辑运算,采用重心法进行清晰化运算,所得ε的参数调整曲面如图2所示.
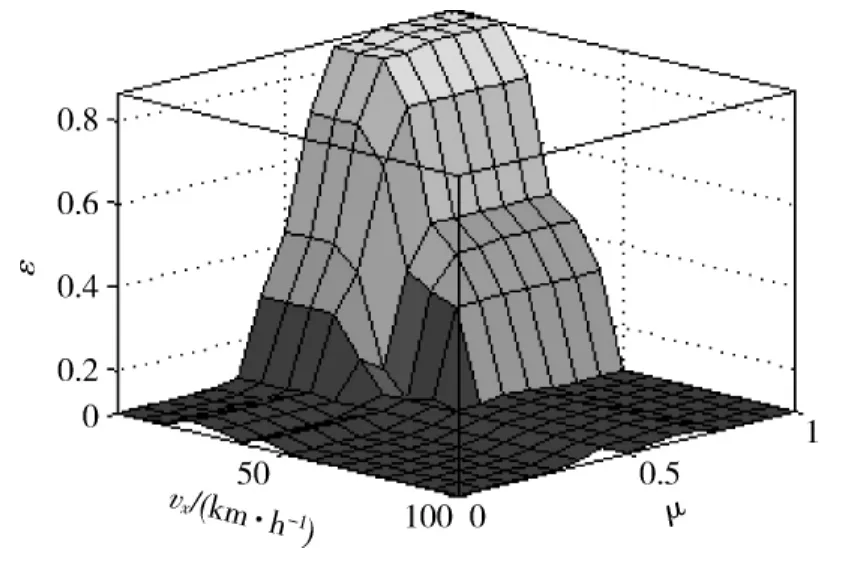
图2 权重系数ε调整二次曲面
在得到中低速控制目标的基础上,进一步融合稳定性控制目标,得到全车速范围的控制目标,见式(6).

根据车辆动力学特性,车辆运动稳定性的重要参数为质心侧偏角,模糊逻辑运算的输入值为纵向车速,其中β 的取值见式(7).max

设计相应的隶属度函数和模糊规则,得到k的调整曲面如图3所示.
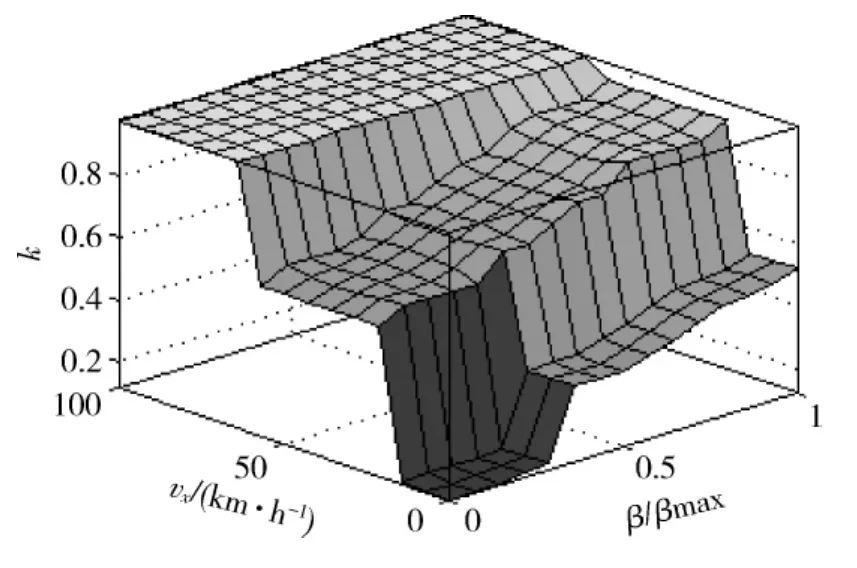
图3 权重系数k调整二次曲面
2 仿真研究
在Matlab/Simulink环境下,利用建立的整车15自由度仿真模型,对控制方法进行了仿真.仿真参数如表1所示.
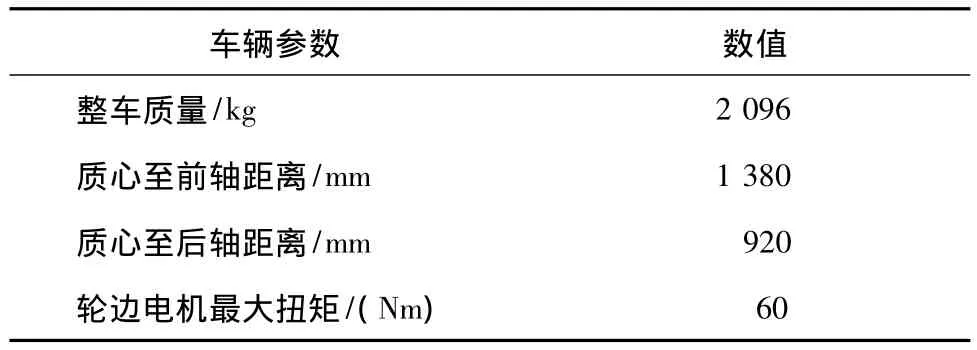
表1 车辆仿真参数
设计工况1:路面附着系数0.8,车速40 km/h,实际方向盘转角为90°.图4显示的是工况1的仿真分析结果.
图4(a)是根据各种控制目标参数的计算结果,可以看出经过模糊逻辑融合算法后,综合控制目标更接近机动性控制目标.图4(b)是基于横摆角速度控制的仿真结果,较未受控情况机动性有所增加.图4(c)为车辆运行轨迹,可以看出车辆的转向半径有所减小.
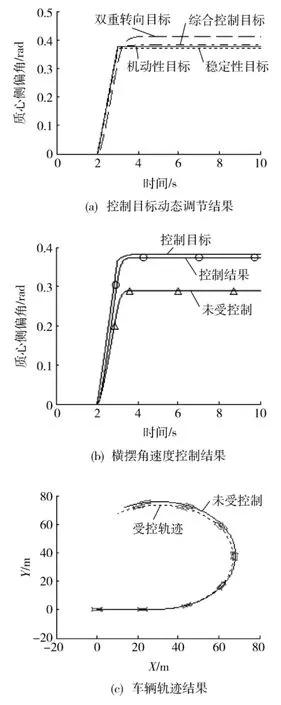
图4 工况1仿真结果
设计工况2:路面附着系数0.8,车速70 km/h,实际方向盘转角30°.图5显示的是工况2的仿真结果.
图5(a)是根据设定工况2对应用各控制目标参数获得的计算结果,可以看出经过模糊逻辑融合算法后,综合控制目标更加接近稳定性控制目标.图5(b)是基于横摆角速度的仿真结果,较未受控情况稳定性有所增加.图5(c)为车辆运行轨迹,可以看出车辆的转向半径有所增加.
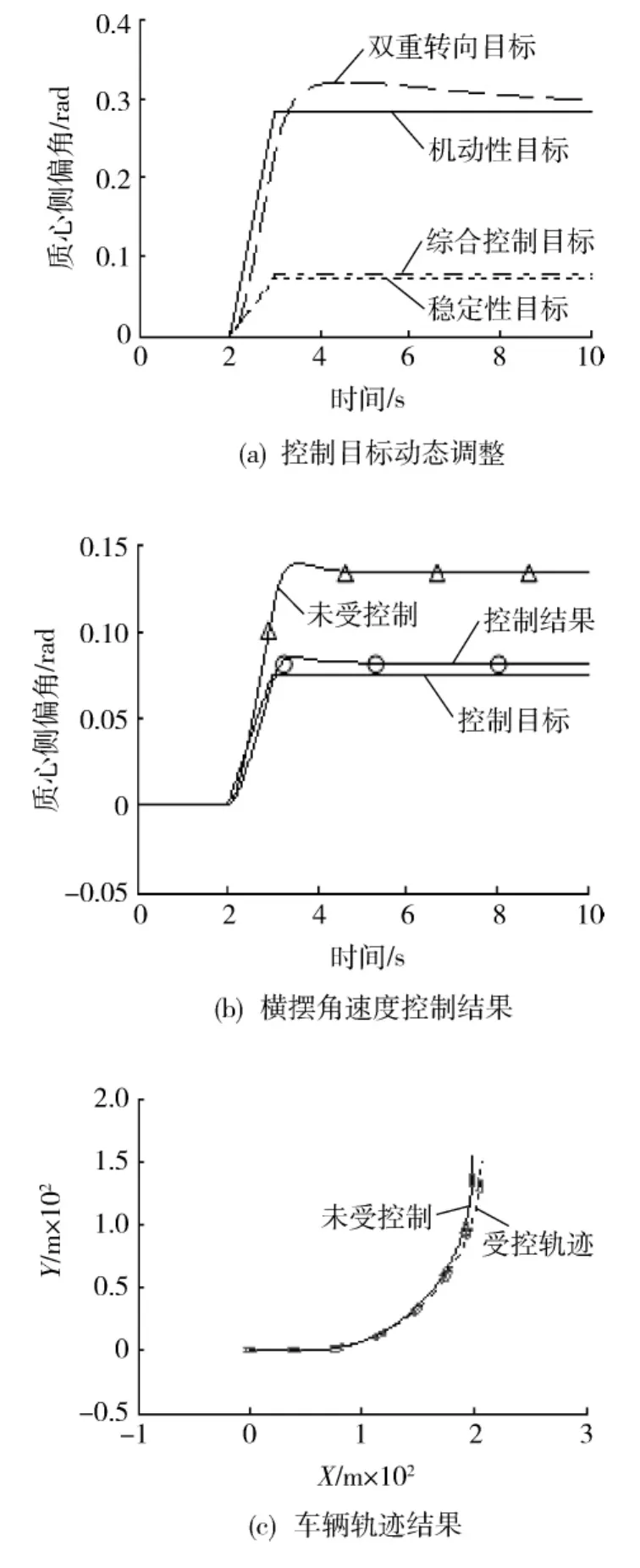
图5 工况2仿真结果
3 结论
通过使用基于双重转向、机动性和稳定性等控制参数设计的控制目标融合算法,可以实现全车速范围内的动力学控制目标,可整体提升车辆的动力学性能.
[1] 范晶晶,罗禹贡,张 弦,等.多轴独立电驱动车辆驱动力的协调控制[J].清华大学学报:自然科学版,2011,51(4):478-481.
[2] 范晶晶,罗禹贡,李克强.多轴独立电驱动混合动力车整车控制系统的开发 [J].机械工程学报,2010,46(10):126-131.
[3] Donghyun Kim,Sungho Hwang,Hyunsoo Kim.Vehicle Stability Enhancement Control for a 4WD HEV[C] //The 21stInternational Battery,Hybrid and Fuel Cell Electric Vehicle Symposium & Exposition.Monaco:2005.
[4] 范晶晶,罗禹贡,张海林,等.全轮独立电驱动车辆双重转向控制策略的开发 [J].汽车工程,2011,(5):369-372.
[5] Aton T.VAN Zantan,Rainer E,Georg P,etc.Control Aspects of the Bosch VDC[C] //The 3rdInternaional Symposium on Advanced Vehicle Control.Aachen,Germany,1996:573-608.