基于非瞬时支链位形设计的并联机构内部奇异消除方法研究
2012-07-25刘延斌李志松韩建海
刘延斌 李志松 韩建海
河南科技大学,洛阳,471003
0 引言
奇异位形是机构的工作空间中存在无法运动或瞬时运动无法确定的位形。在奇异位形附近,机构的刚度、精度等性能指标都会变差。相对于串联机构来说,并联机构的奇异位形更为丰富、复杂,因此如何规避或消除奇异是并联机构研究领域的一个难题。冗余驱动方法是目前提出的减少或消除奇异的一种有效方法。该方法通常是在正常机构的基础上将一部分被动关节变为主动关节,或者在保证机构自由度不变的前提下,增加新的支链,并在该支链上引入冗余驱动[1]。前者虽然简单,但由于在被动关节上添加驱动器会增大系统的惯性或质量,从而影响机构的动力学性能;后者由于引入新的支链,无疑也增加了机构的复杂性,但该方法可以较容易地将驱动器安装在固定基座上,可保证机构的对称性,并能解决运动学正解的多解性问题,所以通过引入新支链的冗余驱动方法更具优越性。
目前,人们的研究主要集中在冗余驱动并联机构所具有的性能、性能评估、驱动力优化、基本原理,以及基于某些性能的结构参数优化设计方面[2-13]。然而对如何从机构方面设计性能最优的冗余驱动机构关注的却不多。对于第二种冗余驱动方法来说,引入何种结构形式的支链,如何布置冗余支链,如何最少地引入支链来消除奇异等关键问题,目前的文献几乎都没有系统地加以阐述和解决。
本文依据螺旋理论提出了一种基于非瞬时支链位形设计的并联机构内部奇异消除方法,然后以3-RRR型、4-RPTR型和3-RRRT型并联机构为例阐述了该方法的设计过程。
1 并联机构奇异位形的分类及特点
1.1 约束奇异
根据螺旋理论,并联机构的每一支链对其动平台都会有一个或多个约束螺旋(六自由度并联机构除外)。若这些力螺旋的独立个数为r,则并联机构的自由度为6-r,而当机构处于某些特殊位形时,这些力螺旋的独立个数降为s(s<r),此时并联机构发生约束奇异。该奇异位形可能发生在工作空间内部,也可能发生在工作空间边界。
1.2 驱动奇异
正常情况下,并联机构的每一支链对其动平台都会有一个驱动螺旋,如果约束螺旋不降秩,而所有驱动螺旋和约束螺旋合在一起的秩小于6时,并联机构发生驱动奇异。该奇异位形大多发生在工作空间内部,对并联机构性能影响较大。
1.3 支链奇异
并联机构在某些特殊位形下,若支链中的驱动螺旋与驱动关节的运动螺旋互易积为零,则机构发生支链奇异,此时支链对动平台产生新的约束螺旋,动平台将失去某些自由度。支链奇异一般发生在工作空间边界,因此对并联机构性能影响不太大。
综上所述,约束奇异和驱动奇异位形一般发生在工作空间内部,不易规避,对并联机构的性能影响最为严重,这里暂且将这两类奇异称为内部奇异。支链奇异位形大多发生在工作空间边界,容易规避,对机构性能影响不是很大,所以本文主要研究约束奇异和驱动奇异位形的消除方法,而对支链奇异暂不考虑。
2 基于非瞬时支链位形设计的并联机构内部奇异消除
根据螺旋理论,约束奇异和驱动奇异难以消除的主要原因是约束螺旋和驱动螺旋的位形变化复杂、难以把握,其秩得不到有效控制。因此在整个工作空间内,如果我们能够使一部分支链约束螺旋和驱动螺旋的位形具有确定性或可控性,那么就可以有目标地消除部分甚至全部的奇异位形。基于这个思路,我们提出一种基于非瞬时支链位形设计的并联机构内部奇异消除方法,该方法具体步骤如下:
(1)分析机构约束奇异和驱动奇异位形。
(2)引入新支链,使其与原支链的驱动螺旋和约束螺旋保持相对确定的位形。引入新支链应遵循如下两个原则:①使新引入的每一支链的驱动螺旋和原机构中一个或更多支链的驱动螺旋保持某种确定位形,或是相交,或是保持空间关系(不相交也不平行);②新支链的约束螺旋与所有原支链的约束螺旋相关,即不能改变动平台的自由度数目。
(3)根据原机构的奇异位形合理布置新支链,以最大限度地消除内部奇异为目标确定所需最少支链个数。
下面以三种典型的并联机构作为设计实例,阐述该方法的具体实施过程。
2.1 3-RRR并联机构的内部奇异消除
图1所示为一种经典实用的3-RRR型平面三自由度(沿X轴、Y轴的平动和绕Z轴的转动)并联机构。与基座连接的3个R副为驱动关节,当不发生支链奇异时,每一支链对动平台均有3个约束螺旋和1个驱动螺旋,如图2所示,其中,$f为约束力矢,、为2个约束力偶,$a为驱动螺旋。当支链奇异时,驱动螺旋消失,支链对动平台会存在4个约束螺旋,其中,$fn为增加的约束力矢,如图3所示。
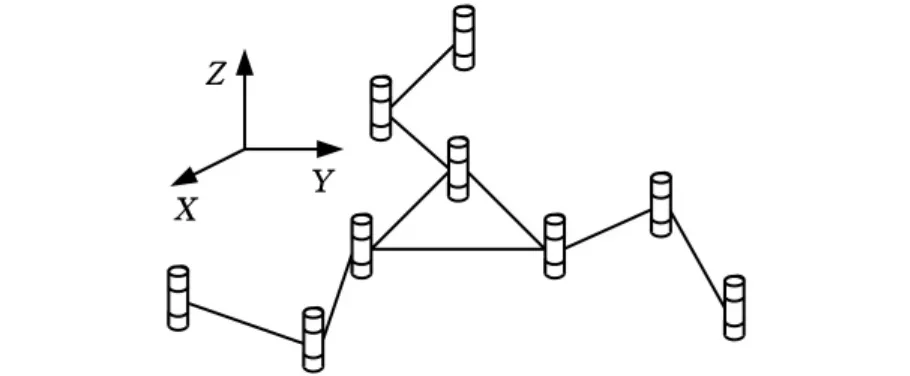
图1 3-RRR并联机构
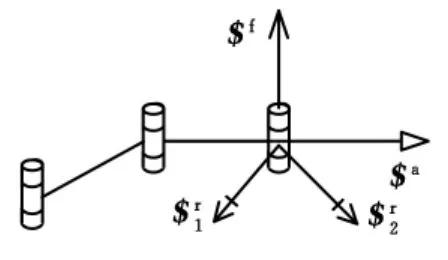
图2 一般位形下的RRR支链
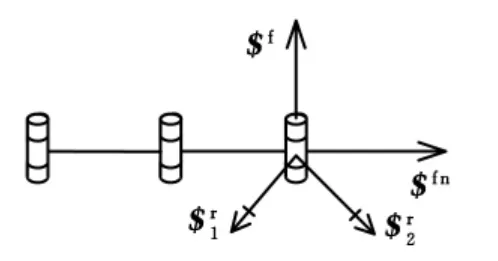
图3 支链奇异位形下的RRR支链

图4 3-RRR并联机构的驱动奇异位形
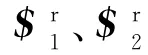
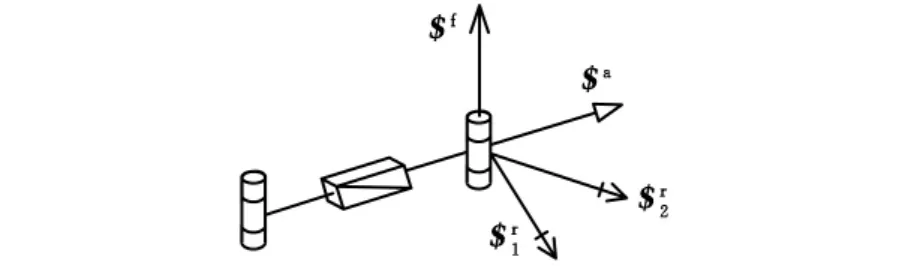
图5 RPR支链
按照上述非瞬时支链位形设计方法,将RPR支链驱动螺旋与原支链的驱动螺旋保持空间关系,即两端的R副同轴。当不发生支链奇异时,、既不平行也不共面,并使RPR支链的约束螺旋与原支链的约束螺旋相关,如图6所示,其中虚线部分表示的是新引入的支链。RPR支链在原机构中的布置如图7所示。

图6 RPR支链与RRR支链的联结
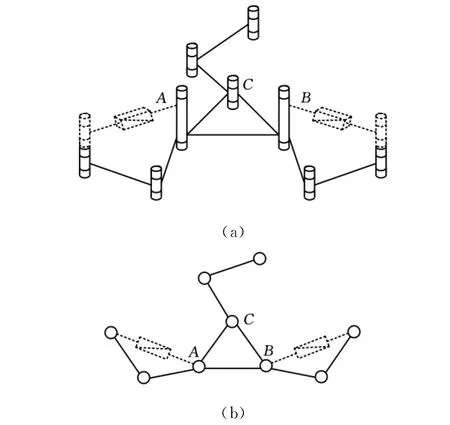
图7 引入RPR支链后的机构
由图7b可以看出,A、B应分别是两对驱动螺旋在XY面内投影的2个交点。当RRR支链不发生支链奇异时,A、B两处的交点位置不会改变,此时图4所示的驱动奇异位形将不会存在。
2.2 4-RPTR并联机构的内部奇异消除
图8所示的4-RPTR并联机构[14]有4个自由度(沿X轴、Y轴、Z轴的平动和绕Y轴的转动),其中,4个P副为驱动关节。当不发生支链奇异时,每一支链对动平台均有1个约束力偶$r和1个驱动螺旋$a,如图9所示。当支链奇异时,驱动螺旋消失,支链对动平台会存在1个约束力偶$r和1个新增约束力矢$fn,如图10所示。
图8 4-RPTR并联机构
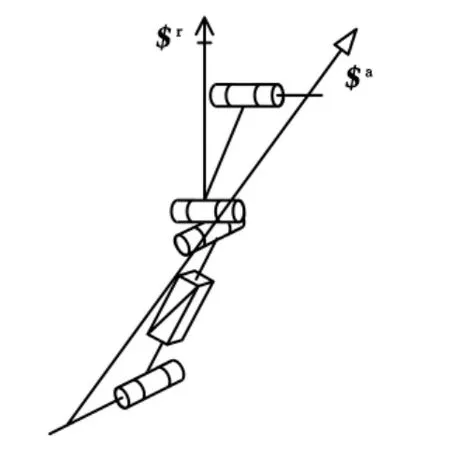
图9 RPTR支链
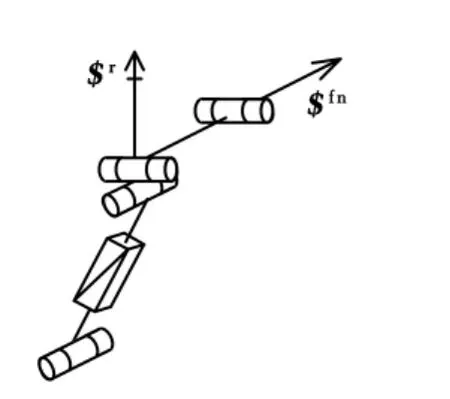
图10 RPTR支链奇异位形

图11a所示为动平台和基平面重合时出现的位形。当所有驱动螺旋共面且平行于XY平面时,动平台沿直线L1的平动和绕直线L2的转动将失控。
图11b中,所有驱动螺旋共点,此时必存在一条平行于Y轴的直线L通过该交点,动平台绕直线L的转动将失控。
图11c中,所有驱动螺旋与一条平行于Y轴的直线L同时相交。此时动平台绕直线L的转动将失控。
图11d中,驱动螺旋两两相交,且两对相交螺旋所分别构成的两个平面相交,此时,动平台绕直线L的转动将失控。
图11e中,所有驱动螺旋同时垂直于一条直线L。此时,动平台沿直线L的平动将失控。
图11f中,所有驱动螺旋空间平行,即同时垂直于一个平面P。此时,动平台沿平面P的平动将失控。
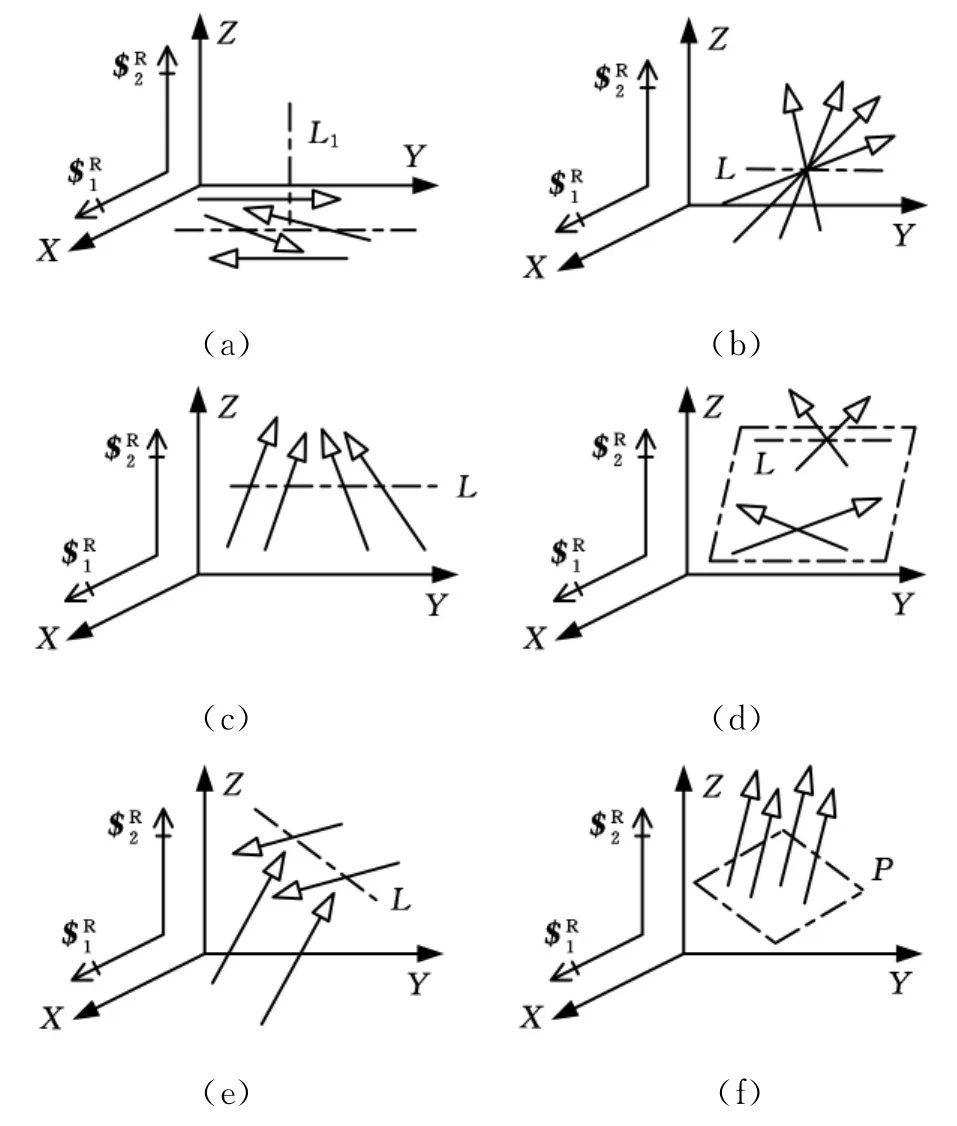
图11 4-RPTR并联机构可能的驱动奇异位形
为消除图11所示的可能奇异位形,我们引入了2条与原支链结构的相同的RPTR支链,P副仍为驱动关节,同样按照非瞬时支链位形设计方法,将引入的RPTR支链驱动螺旋与原支链的驱动螺旋保持相交关系,而其约束螺旋与原支链约束螺旋相关,如图12所示,其中,虚线部分表示的是新引入的支链。引入的RPTR支链在原机构中的布置如图13所示。
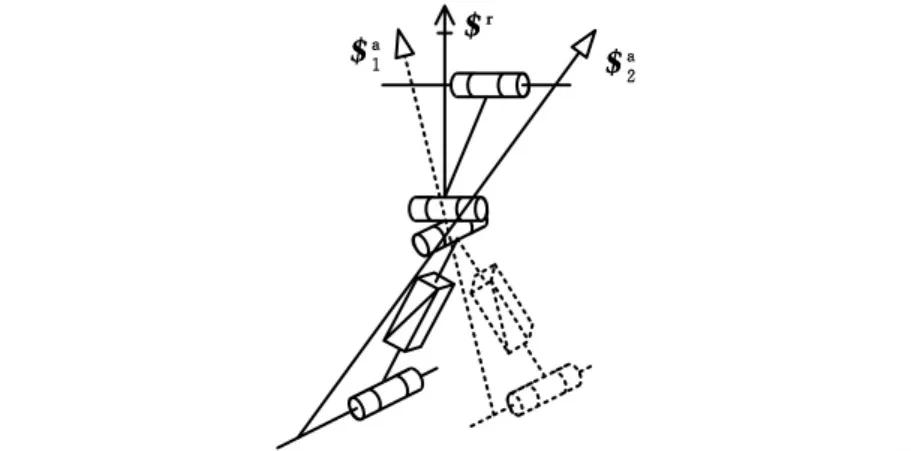
图12 引入的RPTR支链与原支链的联结
由图13可以看出,驱动螺旋和,以及和必相交于T1副、T2副的形心(T1副由R2副和R3副构成,T2副由R7副和R8副构成)。T1副、T2副形心不落在基平面上时,这种位形会一直保持。所以当动平台和基平面不重合且不发生支链奇异时,引入新支链处的2个T副不会重合在一起,因此图11b所示的奇异位形不会出现。
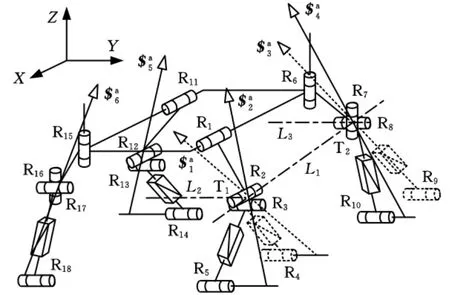
图13 引入RPTR支链后的机构
当动平台和基平面不重合且不发生支链奇异时,过T1副、T2副形心的直线L1永远不会平行Y轴,因此图11c所示的奇异位形不会出现。

当动平台和基平面重合时,图11a所示的奇异位形却不能避免。
2.3 3-RRRT并联机构的内部奇异消除
图14所示为一种3-RRRT型三平移并联机构[15],基平面上的3个R副为驱动关节。当不发生支链奇异时,每一支链对动平台均有1个约束力偶$r和1个驱动螺旋$a,如图15所示。当支链奇异时,驱动螺旋消失,支链对动平台会存在1个约束力偶$r和1个新增约束力矢$fn,其奇异位形有两种,如图16所示。
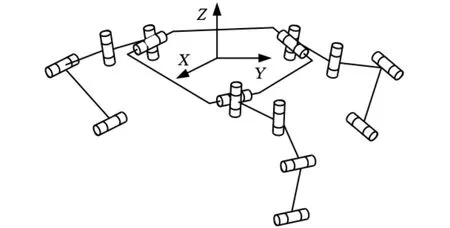
图14 3-RRRT并联机构
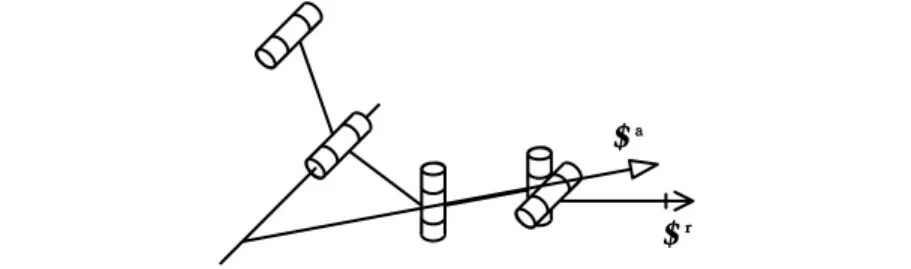
图15 RRRT支链

图16 RRRT支链奇异位形
支链对动平台的3个约束力偶在工作空间内可能出现如图17所示的两种位形。图17a所示的是所有约束力偶平行于XY平面,此时支链对动平台绕直线L的转动将失去约束。图17b中,所有约束力偶平行于Z轴,此时动平台绕平面P上所有直线的转动都将失去约束。

图17 3-RRRT并联机构约束奇异位形
3-RRRT并联机构在工作空间内除动平台和基平面重合外,还可能出现如图18所示的三种奇异位形。

图18 3-RRRT并联机构的三种奇异位形
图18a所示的位形下,所有约束力偶都平行于XY平面,且所有驱动螺旋皆位于平行于XY平面的同一平面内,这些驱动螺旋可能不共点或共点。当不共点时,动平台沿直线L的平动将失控,如图19a所示。当共点时,动平台绕直线L的转动将失去约束,动平台沿直线L的平动也将失控,机构同时产生约束奇异和驱动奇异,如图19b所示。
在图18b所示的位形下,所有约束力偶和驱动螺旋同时平行于Z轴,此时动平台绕平面P上所有直线的转动都将失去约束,动平台沿平面P的平动也将失控,机构同时产生约束奇异和驱动奇异,如图19c所示。
图18c所示的位形下,3个约束力偶不相关,但所有驱动螺旋平行,此时动平台沿平面P的平动将失控,如图19d所示。
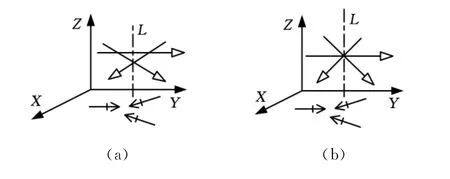

图19 3-RRRT并联机构可能的奇异位形示意图
为消除图19所示的奇异位形,我们引入了1条TPT支链,P副为驱动关节,如图20所示,$r为约束力偶,$a为驱动螺旋,TPT支链不会产生支链奇异。同样,按照非瞬时支链位形设计方法,将TPT支链驱动螺旋与原支链的驱动螺旋保持空间关系,如图21a所示,即两端的R副同轴。当动平台和基平面不重合且不发生支链奇异时,、$既不平行也不共面,而且保证θ≠0(如图21b所示,θ为两R副轴线的空间夹角)。因此TPT支链的约束力偶与原支链的3个约束力偶组成的力偶系的秩必为3,其中虚线部分表示的是新引入的支链。TPT支链在原机构中的布置如图22所示。

图20 TPT支链
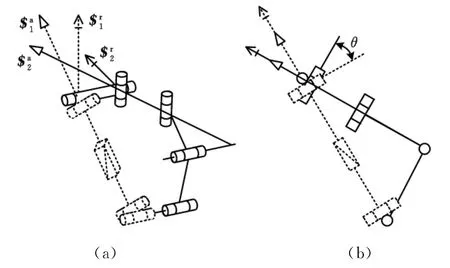
图21 TPT支链与RRRT支链的联结
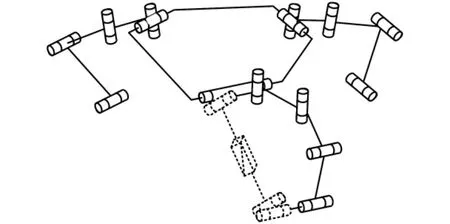
图22 引入TPT支链后的机构
由于引入TPT支链后,所有支链对动平台的约束力偶的秩恒为3,因此当动平台和基平面不重合且不发生支链奇异时,不会再产生如图17所示的约束奇异。又因为TPT支链驱动螺旋$a1与原支链的驱动螺旋既不平行也不共面(图21),所以如图19所示的驱动奇异位形也不会出现。
3 结语
本文提出了一种基于非瞬时支链位形设计的并联机构奇异消除方法,目的是消除约束奇异和驱动奇异两种内部奇异位形。以3-RRR型、4-RPTR型和3-RRRT型并联机构为例,系统阐述了该方法的设计过程。结果表明,利用该方法能避免除动平台和基平台重合的特殊位形以外的所有内部奇异位形。通过该方法能够较容易确定所引入支链的结构形式、布置方式和最少支链个数。
[1]Brien J F O,Wen J T.Redundant Actuation for Improving Kinematic Manipulability[C]//IEEE International Conference on Robotics and Automation(ICRA).Piscataway,NJ,USA,1999:1520-1525.
[2]Ebrahimi I,Carretero J A,Boudreau R.3-PRRR Redundant Planar Parallel Manipulator:Inverse Displacement,Workspace and Singularity Analyses[J].Mechanism and Machine Theory,2007,42(8):1007-1016.
[3]Tosi D,Legnani G,Pedrocchi N,et al.Cheope:A New Reconfigurable Redundant Manipulator [J].Mechanism and Machine Theory,2010,45(4):611-626.
[4]Zhao Y J,Gao F.Dynamic Formulation and Performance Evaluation of the Redundant Parallel Manipulator[J].Robotics and Computer-Integrated Manufacturing,2009,25(4/5):770-781.
[5]Wang L P,Wu J,Wang J S.Dynamic Formulation of a Planar 3-DOF Parallel Manipulator with Actuation Redundancy[J].Robotics and Computer-Integrated Manufacturing,2010,26(1):67-73.
[6]Nokleby S B,Fisher R,Podhorodeski R P,et al.Force Capabilities of Redundantly-actuated Parallel Manipulators[J].Mechanism and Machine Theory,2005,40(5):578-599.
[7]Zhu Z S,Dou R L.Optimum Design of 2-DOF Parallel Manipulators with Actuation Redundancy[J].Mechatronics,2009,19(5):761-766.
[8]Garg V,Nokleby S B,Carretero J A.Wrench Capability Analysis of Redundantly Actuated Spatial Parallel Manipulators[J].Mechanism and Machine Theory,2009,44(5):1070-1081.
[9]张立杰,李永泉.一种冗余驱动并联机器人机构工作空间及奇异的研究[J].中国机械工程,2009,20(23):2787-2790.
[10]张彦斐,宫金良,高峰.冗余驱动消除并联机构位形奇异原理[J].中国机械工程,2006,17(5):445-448.
[11]白志富,韩先国,陈五一.冗余驱动消除并联机构奇异研究[J].航空学报,2006,27(4):733-736.
[12]韩先国,陈五一,郭卫东.采用冗余驱动提高并联机床精度的研究[J].航空学报,2002,23(5):487-490.
[13]刘欣,仇原鹰,盛英,等.平面冗余并联机器人的综合性能优化设计[J].西南交通大学学报,2008,43(5):626-632.
[14]刘延斌,张书涛,韩建海,等.一种新型4-RPTR并联机构及运动学分析[J].中国机械工程,2010,21(23):2812-2815.
[15]刘延斌,贾现召,赵新华.3-RRRT并联机器人动力学建模及其正向求解[J].哈尔滨工业大学学报,2009,41(5):238-240.
