BLDCM调速系统滑模控制技术研究
2012-07-20李凤祥朱伟进
李凤祥,杜 君,朱伟进
(江苏大学,江苏镇江212013)
0 引 言
无刷直流电动机(以下简称BLDCM)由于成本低、控制简单,且具有较好的直流调速性能等优点,在航天、机器人、数控机床、电动车等许多领域获得了广泛应用。但是,如何实现最优性能的控制,仍然是目前探索和研究的热点[1-3]。采用常规的PID控制,虽能达到一定的控制,但是,必须依赖于系统的准确模型,并且易受到外来扰动和系统参数变化的影响,且PID参数难以整定,系统鲁棒性不强。现代控制如模型参考自适应控制、神经网络控制等可以有效地改善电机的运行性能。但是,模型参考自适应控制对负载的变化较敏感;而神经网络控制需要不断学习,调整参数,对微处理器的运算速度要求较高,硬件电路实现比较困难。
实际工业生产过程往往具有非线性、时变不确定性,难以建立精确的数学模型等特点。并且,其驱动电路是一种时变、强非线性开关电路,具有变结构的特点。滑模控制正是基于这种变结构特点建立起来的控制策略。由于事先设计好滑模面,在理论上保证此系统具有李亚普诺夫意义下的渐进稳定性,所以系统将严格按照此滑模面趋近于目标控制,不受外界的干扰,具有很强的鲁棒性。本文将滑模控制应用于BLDCM调速系统,并在MATLAB环境下对其进行仿真研究。
1 BLDCM数学模型
BLDCM的定子与电励磁三相同步电动机的定子相似。在建立数学模型及分析设计过程中一般作如下假设:转子永磁磁场在气隙空间呈梯形分布,定子感应电动势为梯形波;假设定子铁心不饱和,磁路为线性,电感参数恒定不变;不计铁心涡流和磁滞损耗;转子上没有阻尼绕组。
BLDCM在三相静止坐标下的电压方程为:
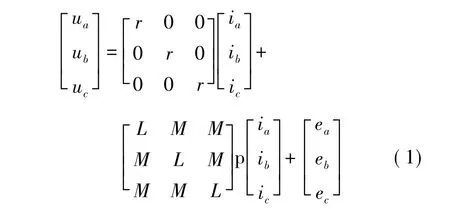
式中:ua、ub、uc为三相相电压;ia、ib、ic为三相相电流;ea、eb、ec为三相反电动势;r为定子电阻;L为定子自感;M为定子互感;p为微分算子。
如果三相绕组为星形联结,则有ia+ib+ic=0,将此式代入式(1)简化得:

力矩平衡方程:

式中:Te为电磁转矩;Tl为负载转矩;J为转动惯量;ω为机械角速度。
2 滑模变结构控制
2.1 滑模控制的基本原理
一般高性能的控制系统采用闭环控制,在整个控制过程中,控制量u(x)是状态变量x的连续函数,系统结构一直保持不变。而在滑模控制系统中,控制量u(x)在整个反馈控制中是状态变量的一种非连续函数。u(x)通过一个开关S按照一定的切换法则切换到u+(x)或u-(x)。当 u(x)接通 u+(x)时,闭环系统形成一种结构;当控制量u(x)接通u-(x)时,闭环系统构成另一种结构。系统结构在控制过程中不断变化。因此,滑模控制满足三个要求[4]:
滑模存在性条件的意义:使SdS<0,即使S与dS异号,当S偏移滑模面时,dS变化相反,从而阻止S偏移滑模面,使系统严格按照设计好的滑模面接近目标控制。
滑模的达到性:要求在滑模面以外的状态点都能在有限的时间内到达滑模切换面,否则,将系统无法启动滑模运动。很明显,当控制系统满足滑模存在性条件的同时,也满足滑模达到性条件。
滑模的稳定性:当系统进入滑动模态区后,系统开始滑模运动。而对于一般的反馈系统,都要求滑模运动渐进稳定。
2.2 滑模控制器的设计
滑模控制器的设计一般有如下三个步骤[5-6]:
(1)选择好滑模面,如S=cx1+x2。
(2)给出控制量u的具体形式,如u=φ1x1+φ2x2。
(3)根据稳定性条件来整定参数φ1、φ2的范围。
在整定参数时,需要考虑S、x1、x2等变量的符号,若S<0时,需要判断x1<0还是x2>0,才能确定其中一个参数,通过类似判断,最后才能整定参数的具体范围。这就给理论求解和实际编程都带来很大的麻烦。因此,本文在u的求取上采用限制式的趋近律法,利用趋近律法自然满足S<0的稳定性条件,以方便求得控制量u。
取BLDCM的状态变量:

式中:ωref为给定转速;ω为实际转速。
联合式(3)得:

取系统的滑模面:

对S求导得:


式中:ε、k均为正常数。
结合式(7)和式(8)得:

最后由式(9)求得控制量Te:

由式(6)和式(8)得:

2.3 抖振问题
在理想的滑模控制系统中,若结构切换具有理想的开关特性,则滑动模态总是降维的光滑运动,且渐进稳定于原点,系统不会发生抖振。但是,在实际的系统中,抖振是肯定存在的,其原因有很多,主要有时间滞后开关、空间滞后开关、系统惯性的影响,离散系统本身造成的抖振。因此抖振问题的解决对提高滑模控制系统的性能至关重要[7]。本文采用连续开关函数替代常规滑模控制中的开关函数,有效减小了系统抖振。本文采用的开关函数如下:

式中:λ是正常数。若λ取值过小,系统容易产生抖振;若λ取值过大,则会影响系统正常运行段的动态品质,动态响应慢。所以,应根据实际系统控制要求,综合选取λ。
3 仿真研究
3.1 仿真方法
本文采用实际的电机参数在MATLAB环境下进行仿真研究[8]。电机参数如表1所示。

参数 定子电阻/Ω直流母线电压/V数值定子电感/H转动惯量/(kg·m -2)额定转速/(r·min -1)0.35 0.004 63 0.002 2 000 48
BLDCM调速系统的滑模控制器结构仿真框图如图1所示。
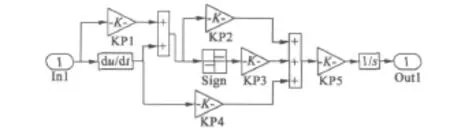
图1 调速系统的滑模控制框图
仿真结果如图2~图5所示。


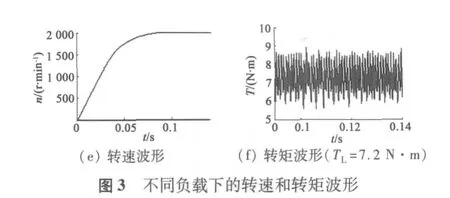
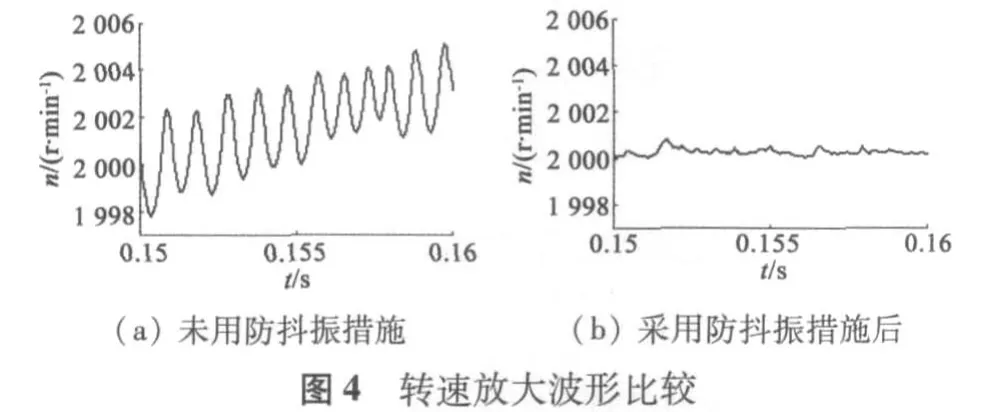

图5为数字量仿真结果,纵坐标没有单位。
3.2 仿真结论
通过对仿真数据和波形的分析研究,可以得到以下结论:
(1)由图2可知,滑模控制系统具有平稳的调速性能,且滑模参数容易整定。系统在控制器参数变化较大的情况下,转速响应均能保持较高的稳态精度。
(2)由图3可知,滑模控制系统对负载变化不敏感,在负载变化较大的情况下,转速响应均能保持良好的跟踪性能。
(3)由图4和图5可知,采用连续开关函数的方法有效抑制了转速抖振。此方法之所以能够有效抑制抖振,在于连续开关函数能够根据滑模面函数的状态连续平滑地调节开关输出,避免了常规开关函数只能离散输出的缺点,使系统控制量输出更为合理,从而使系统响应性能处于更优状态。
仿真研究表明,滑模控制是一种性能优良的控制策略,将其用于BLDCM调速系统,速度响应快速平稳,对负载变化不敏感,具有较强的鲁棒性,控制器参数容易整定,算法也较简单,易于工程实现。
4 实验验证
4.1 他控同步与自控同步的切换
由于BLDCM在静止、低速运行时,感应电动势为零或非常小,所以,在实际控制中很难判断出电机转子磁极的位置。因此,必须采用其它方法实现电机转子进行定位和起动。
实际应用中,一般采用“三段式”起动方法,即“转子定位”、“他控同步加速运行”、“自控同步运行”三段法。此方法最关键的是“他控同步”与“自控同步”之间的切换,关系到BLDCM起动的成败。在实际应用中,需要进行反复调试来确定最佳切换时刻和速度点,十分繁琐;另外,采用该方法后,状态切换时电机的转矩较小、易受干扰,负载变化时还要重新调整切换速度。针对这一问题,本文提出了“自寻最佳点切换法”。其原理是在他控同步运行中,CPU按一定的压频比输出频率,不断增加的他控同步信号S1实时检测由位置检测电路输出的自同步信号S2,计算两者的误差△δ,当△δ达到某一阈值时,立即进行“他控”到“自控”运行方式的切换。
图6(b)所示为零起动过程中的三相反电势实测波形。分析可知,在边界线左侧,电机处于静止状态,检测到的反电势波形与图6(a)所示的相同。当转子预定位之后,若转子稍有转动,便能灵敏地检测到反电动势,而有稳定可靠的信号输出(边界线右边的波形),电机便可迅速进入自控同步运行,而无需经过“三段式”起动法中的“他控同步”阶段,这充分证明采用本方案后,BLDCM具有较高的起动灵敏度,有利于电机实现负载下快速零起动。
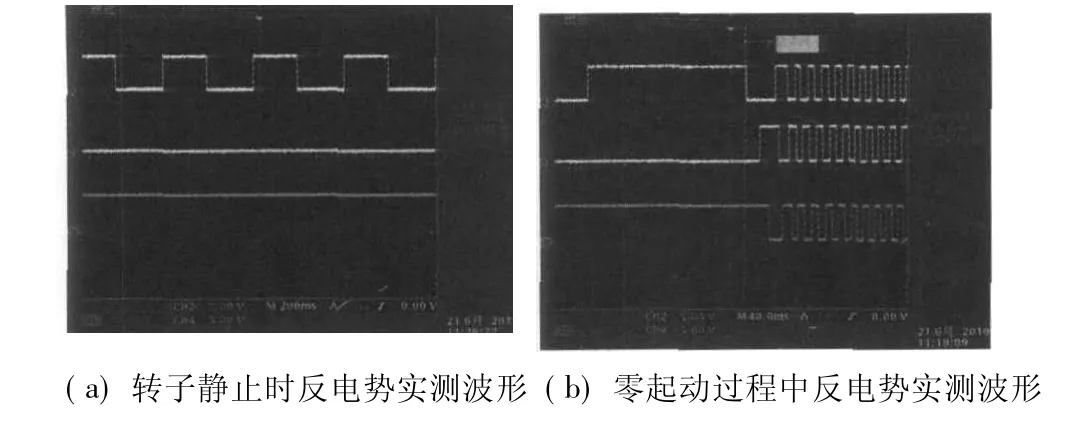
图6 转子位置变结构检测结果
4.2 双模运行滑模控制
对于从无位置传感器运行模式切换到有位置传感器运行模式而言,无需在电机运转时瞬时切换,这是因为电机此时照样能在无位置传感器下正常运行。而对于从有位置传感器运行模式切换到无位置传感器运行模式而言,必须在电机运转时瞬时切换,这是因为如果不及时切换,电机将无法正常运行。故本方案的重点在于从有位置传感器运行模式到无位置传感器运行模式的切换。
本文采取如下试验方法,即测试电机从有位置传感器运行模式到无位置传感器运行模式的切换:电机运行在有位置传感器模式,在不同的负载电流下断开霍尔信号,或者使霍尔信号短路,观察此时控制器的电流变化,电机有无明显抖动。测试结果如表2所示。
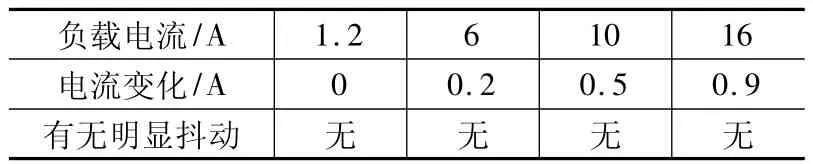
表2 电机从有霍尔切换到无霍尔的实验数据
由表中数据可知,随着负载的增加,控制器的电流变化增大,但幅度都较小,电机无明显抖动,满足了双模式运行变结构控制的设计要求。
[1] 李鸿儒,顾树生.基于神经网络的PMSM速度和位置自适应观测器的设计[J].中国电机工程学报,2002,22(12):31 -35.
[2] 马义方,蔡际令,汪雄海.伺服系统的自适应模糊滑模最优控制研究[J].浙江大学学报,2006,40(6):1032-1035.
[3] 张昌凡,王耀南,何静.永磁同步伺服电机的变结构智能控制[J].中国电机工程学报,2002,22(7):13-17.
[4] 高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990.
[5] 李君,李毓洲.无速度传感器永磁同步电机的SVM-DTC控制[J].中国电机工程学报,2007,27(3):28 -33.
[6] 宋受俊,张智慧.无刷直流电动机的变结构控制[J].中小型电机,2005,32(5):26 -29.
[7] 贾洪平,贺益康.永磁同步电机滑模变结构直接转矩控制[J].电工技术学报,2006,21:1 -6.
[8] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
