基于图像二值化的动态干涉条纹研究
2012-07-05刘先章夏士明黄雁华
刘先章 夏士明 黄雁华
(中国人民解放军理工大学,江苏 南京 210007)
1 引言
在很多领域,人们需要进行微小尺度变化的测量.通过大学物理课程的学习我们知道,光的干涉法是测量微小尺度变化的有效方法[1,2].迈克尔孙干涉仪是比较典型的测量仪器,由于设计精巧、用途广泛,根据它的工作原理研制出了多种干涉仪,在近代物理和近代计量技术中被广泛应用[3,4].但在测量的时候,需要通过人眼判断并计数移动的条纹个数,费时费劲,而且当条纹移动更快一点时,人眼就不能分清条纹个数了,对于弱振等引起的快速动态移动条纹的测量,采用传统方法对条纹计数显得更加困难.
数字图像处理技术以其容易实现、形象直观、灵活等优点已经广泛应用在图像识别与动态处理中,我们设想可以把动态条纹的采集与计数交给计算机,再利用图像处理方法进行求解.本课题利用迈克尔孙干涉仪原理进行了光路设计,采用Matlab软件,基于图像二值化处理技术[5],把动态干涉条纹图变成动态二值化图,对单向微位移的动态干涉条纹进行计数研究,得到了一些有意义的结论.
2 基本原理
2.1 迈克耳孙干涉仪原理
迈克尔孙干涉仪是1883年美国物理学家迈克尔孙和莫雷合作,为了研究以太漂移实验而设计的一种精密光学仪器.在物理量测量及检测成像等方面有广泛应用,如:测量钠黄光波长及钠黄光双线的波长差、测量光波的相干长度、测量气体和固体的折射率[6]等.如图1,在迈克耳孙干涉仪中,有两片精密磨光的平面反射镜 M1和 M2.M1固定,M2可前后移动,G1,G2是两块相同的平行玻璃板,G1的一个表面涂有半透明的薄层银,呈半透明,G2为相位补偿板,G1,G2与 M1,M2成45°放置,M′1为 M1经薄层银面成的像,若 M1,M2严格垂直,则M′1、M2严格平行.从激光光源发出的光,一路透过G1和G2,经M1反射后再透过G2,经G1的薄层银面反射形成光束1;另一路经G1的薄层银面反射,再经M2反射后透过G1,形成光束2.两束光1、2是相干的,在E处可观察到干涉条纹.
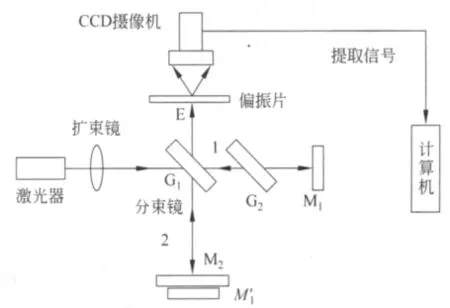
图1 基于迈克尔孙干涉仪的光路设计图
M1,M2严格垂直时,M′1、M2严格平行,相当于在M′1和M2之间形成厚度均匀的空气膜,因此可观察到等倾干涉.如图2上排图是M2不断接近M′1并越过M′1过程产生的干涉图.
当 M1,M2不严格垂直时,M′1、M2不严格平行,相当于在M′1和M2之间形成厚度不均匀的劈形空气膜,因此可观察到等厚干涉.如图2下排图是M′1和 M2之间有微小交角变化产生的各干涉图.

图2 两个反射镜在相对位置不同时产生的各种干涉条纹
2.2 光路设计
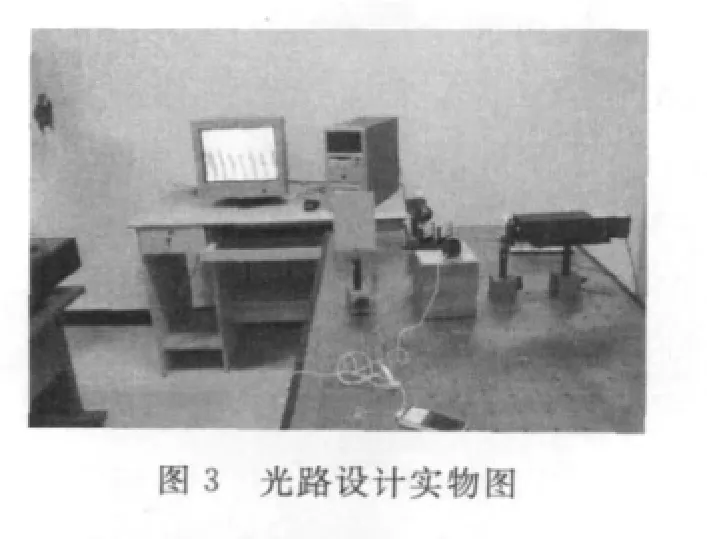
利用迈克尔孙干涉仪原理进行光路设计,并采用CCD采集微位移的动态干涉条纹,为数字图像处理做准备.图3是基于迈克尔孙干涉仪的光路设计图.光源采用He-Ne激光器作为光源,该型号激光器具有很好的单色性,波长为632.8nm,功率约1.5mW.光屏幕前放置了420线阵CCD摄像机,并在其前面放置偏振片以调节亮度,以防损坏CCD摄像机.
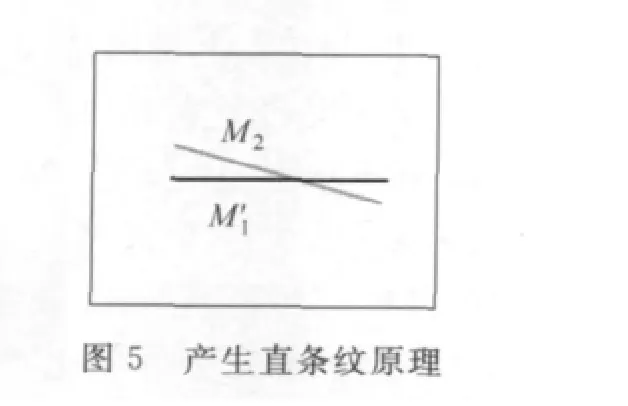
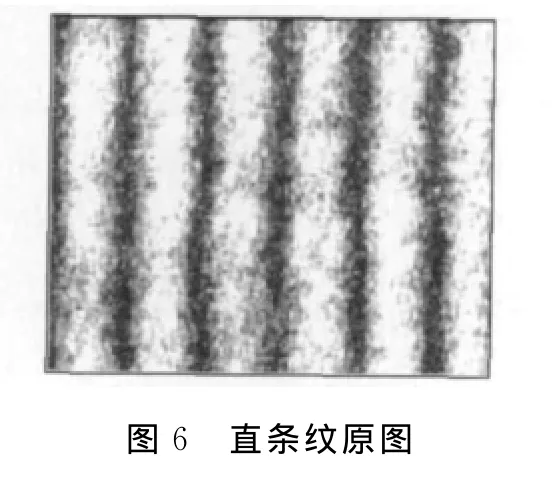
为了便于计算机图像计数处理,我们利用图2下排的第三个图,其形成原理如图5所示,当M′1和M2之间形成厚度不均匀的对角劈形空气膜时,迈克尔孙干涉图样形成图2下排的第三个图.移动反射镜M2,就能看到干涉直条纹不断地左移或右移.当M2平移λ/2距离时,光线1、2之间的光程差就增加或减小λ,在观察镜中看到一个条纹移过视场.数出视场中明条纹移动的数目N(本文中N可以是分数),就可以计算出 M2移动的距离,从而求得单向微位移结果

2.3 图像二值化处理干涉条纹
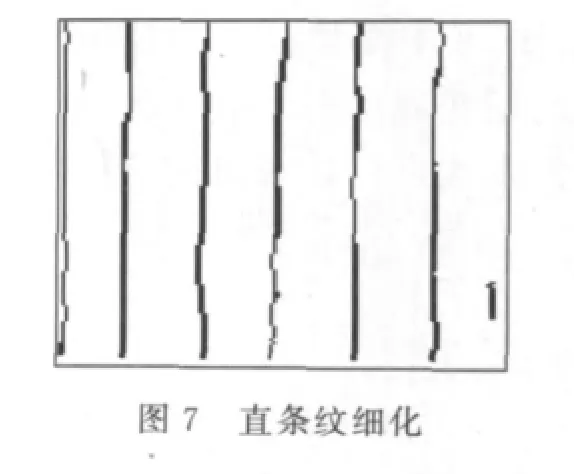
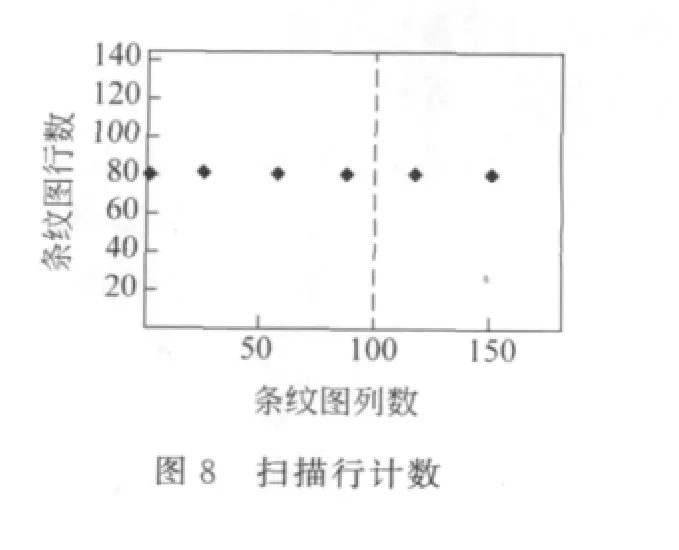
处理过程主要包括二值化条纹图,形态学处理,高斯滤波和条纹细化等四个步骤.二值化是把条纹图转化为只有黑、白二值的图像,它没有呈现出灰度的变化;形态学处理主要是腐蚀和膨胀操作,用来填补暗纹中的空洞;高斯滤波用来消除条纹边缘的毛刺;条纹细化用来标记条纹的中心位置.如图7是上述四个步骤的结果.图8是对扫描行进行计数,在基准线(虚线)处统计移动的条纹数.
3 动态干涉条纹测量过程
3.1 总体思路
我们首先进行单向动态条纹研究.测量沿单向位置微小变化的物体,把测量对象放置在图1所示的测量系统上.当CCD摄像机采集了当前的动态条纹后,测量程序进行了实时动态条纹计数,精确到了分数个条纹,并输出结果,最后计算出单向移动的距离,测量系统总体思路如图9所示.

图9 总体思路图
3.2 测量系统实现步骤
(1)把平台摆放好,并调平.各个实验仪器的位置参看图1,先把各个仪器的中心高度调至共轴,图1为依据本设计原理制作的测量主要光路图,平面反射镜到分光镜的距离和另一个可以连接被测物体平面反射镜到分光镜的距离相同.
(2)使激光器发出的光束平行于工作平台的工作面.分别放入扩束镜和准直镜,调节准直镜,使通过它的被扩束的激光变成平行光,平行光束应通过放入光路中的部件(分光镜、反光镜等)的中心且平行于平台.
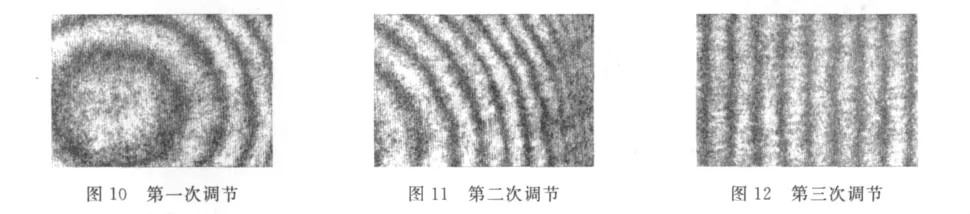
(3)CCD摄像机前放入偏振片以调节亮度,以防止损坏CCD摄像机.调节分光镜上二维调整台的微调旋扭,使被反光镜反射的两束光的中心照射到CCD摄像机接收表面上.这时便可以在采集图像的软件上看到干涉条纹.最后再放入聚焦透镜,调节透镜与CCD的距离,使屏幕上得到最清晰、最完整的像.如图10、图11、图12是分别从圆形干涉条纹调节到直条纹的实际过程图.
3.3 测量程序实现过程
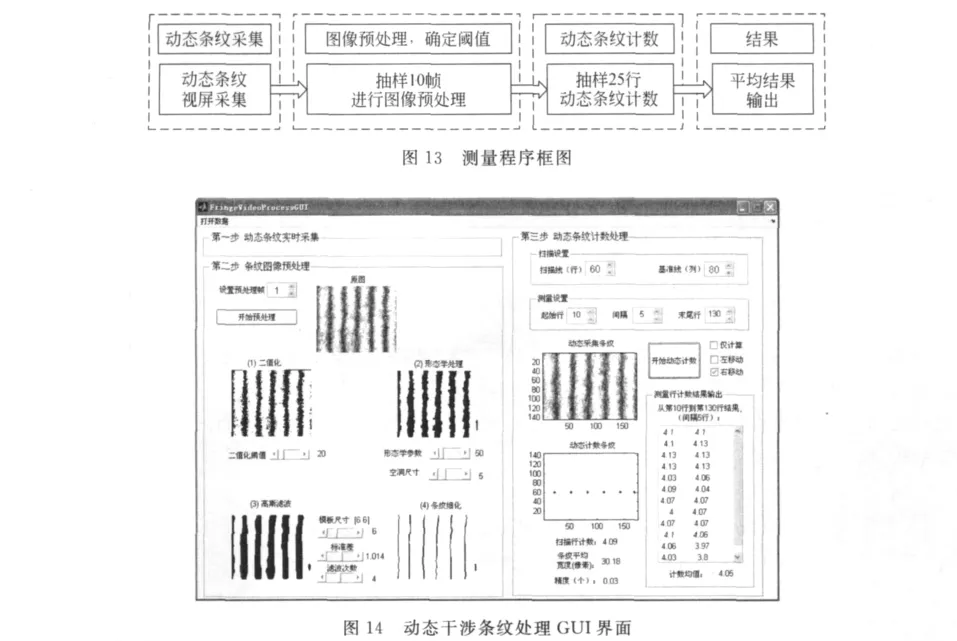
测量程序实现过程是本课题研究的核心,主要分以下四个步骤:(1)动态条纹采集;(2)图像预处理,确定阈值;(3)动态条纹计数;(4)输出计数结果.测量程序框图如图13,程序界面如图14.图像预处理是为了确定阈值,使各帧图能准确地转化为条纹细化图(如图7),进行下一步的动态条纹计数,最终得到较准确的结果.
1)动态条纹采集
按照图1设计的光路,把被测量对象放在M2上,并单向微移动,CCD摄像机实时采集动态干涉条纹,输入到动态干涉条纹处理GUI界面,如图14.
2)图像预处理,确定阈值
随机抽样10帧进行图像处理,若全部二值化结果理想,则可确定5个阈值参数.图14对某次单向微振动进行了测试,采集之后进行了图像预处理,采用下面三个自编的子程序对抽样帧图进行了图像预处理测试,测试方法和结果如图15.
TempImageBW=BW(TempImage,Tbw);
TempImageBWB=bwareaopen(TempImageBW,
bwareaopenT);
TempImageBWC=imclose(bwmorph(TempImageB
WB,'close'),nhood);
Imagegauss=GaussImage(TempImageBWC,Argu - mentMatix,Argument,N)

图15 确定阈值的步骤
确定阈值参数如图14,抽样当前动态条纹的第一帧图,得二值化图像参数Tbw=20,形态学操作参数bwareaopenT=50,空洞尺寸nhood为5,高斯滤波矩阵ArgumentMatix、阈值Argument、高斯滤波次数N分别为6,1.014,4.
3)动态条纹计数
扫描设置:条纹图的第60行二值化结果见图15的最后一个图,并设置基准线为80列,即就好像人眼一直盯着第80列看条纹从起始到结束移动的个数.
测量设置:利用上面得到的参数,并设置要测试的动态条纹图的行对象,程序中起始行为第10行,间隔5行到第130行共25个抽样行,并求出各行的条纹移动个数.程序计算思路如图16.

图16 动态条纹计数程序思路图
4)输出计数结果
点击开始测试按钮后,开始对上面设置的参数进行处理.开始的时候,程序在后台计算各帧的初始数据,然后再进行动态条纹扫描并计数.计算结果如图15,精确到了分数位,最后对25抽样行进行求均值得4.05个.
同样地,我们对移动速度不同的测量对象进行了相同方法的测试,得到如图17的结果.
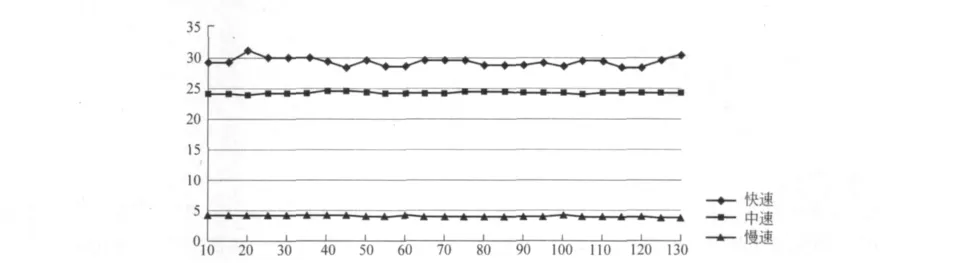
图17 不同移动速度的测量结果
由图17看出,由于计算机处理速度和程序的缺陷,当条纹移动速度较快时,难以控制其稳定性,存在较大误差;当均匀移动条纹或移动速度较慢时,误差较小,精度较高.本课题采用激光波长为632.8nm,利用式(1),计算得到测量结果,如表1所示.

表1 不同移动速度的条纹计数结果对比
由表1可以看出,利用计算机可以较容易地计数到0.03个条纹,测量精度可达0.01μm.
4 误差分析
通过图像处理分析动态干涉条纹,虽然提高了测量精度,但我们的工作也存在一定误差,分析如下:
(1)机械移动误差,用手调节微调旋钮的过程中,很难保证条纹的移动与手动调节是一致的;
(2)图像初始化误差,在设置阈值时,参数选得不恰当,会给后面的计数带来误差;
(3)二值化误差,在对图像进行滤波、细化等处理的过程中,阈值的选择都会对后面的抽样二值化图产生影响;
(4)数据处理误差,数据的选取要具有代表性,尽量选择误差较小的处理数据的方法.
5 课题结论与展望
在本课题研究中,经历了资料搜集、文献阅读、光路调节、实物改进、单向微振动的选取和CCD视频拍摄、软件编写、图像处理和数据分析等多个环节.课题研究期间遇到了一系列的问题,如(1)光路调节时产生的干扰光线以及图像不合要求等;(2)实物制作时材料的选取,既要达到良好的固定效果,又要有一定的防震作用,既要方便光路的调节,又要满足较高的精度等苛刻条件;(3)在实验过程当中,发现移动速度较快的对象,难以控制,以后将进一步改进程序,为进行更加复杂的研究打下基础.
1)主要结论
课题组在迈克尔孙干涉仪原理的基础上,自制了光路实物,并进行了光路设计,基于图像二值化处理技术,采用Matlab编程,制作了动态干涉条纹处理GUI界面,对CCD采集的单向微位移动态干涉条纹,进行了精确到0.03个条纹的计数研究,对于中速或者慢速移动条纹得到了较好的结果,以后应该优化程序,使其能处理快速双向的条纹变化.
2)创新点
(1)采用图像二值化方法,设计了交互式的动态条纹计数GUI界面,可以形象直观地显示条纹变化的过程和动态计数的细节,提供了一种可视化的条纹计数方法.
(2)可代替人工进行移动速度为人眼可视的条纹计数,精度可达0.03个条纹,课题结论对进一步研究移动速度较快的条纹计数等问题具有积极的意义.
3)展望
课题对单向微位移的动态条纹计数进行了研究,并得到了很好的结果,随着工作进一步展开,我们觉得以本课题为基础,可以进一步研究:(1)对程序进行优化,使其能够处理双向移动的条纹信息,进而拓展研究范畴;(2)在双向弱振研究基础上,可研究激光监听,从光干涉角度来获取语音信息;(3)研究微小振动形式及其变化,将其用于基于光路信息的加密,对信息安全有重要研究意义.
[1]赵凯华,钟锡华.光学(上册)[M].北京:北京大学出版社,1984
[2]沈元华.设计性研究性物理实验教程[M].上海:复旦大学出版社
[3]石朝阳,邓燕辉.迈克尔孙干涉仪读数系统的改进[J].物理与工程,2008,18(4):37~39
[4]陈鹏,蒋逢春,商继敏.对迈克尔孙干涉图样的分析[J].新乡师范高等专科学校学报,2006,20(3):12~13
[5]吴玲玲,吴国俊,仓玉萍等.基于Talbot-Moiré法测量透镜焦距的莫尔条纹的图像处理[J].光子学报,2010,39(9):1723~1727
[6]魏茂金,张朝清,黄思俞.迈克耳孙干涉仪测量介质板折射率的问题研究[J].物理实验,2010,30(6):28~31
