基于功率反馈的涡轴发动机神经网络PID控制研究
2012-07-02段绍栋肖玲斐申涛
段绍栋,肖玲斐,申涛
(南京航空航天大学能源与动力学院,南京 210016)
基于功率反馈的涡轴发动机神经网络PID控制研究
段绍栋,肖玲斐,申涛
(南京航空航天大学能源与动力学院,南京 210016)

段绍栋(1986),男,在读硕士研究生,研究方向为航空发动机建模与控制技术。
通过对功率平衡关系进行分析,提出了利用功率反馈设计智能神经网络PID控制器的方法。基于BP(Back Propagation)神经网络,将功率信号作为神经网络的输入层信号,并改进了网络权值的学习规则。通过在线整定PID参数,控制器能够根据功率误差信号的变化实时调整控制参数,从而使系统自主寻找到功率平衡点,具有良好的稳态和动态响应特性。仿真结果表明:该方法可以使涡轴发动机在全包线范围内具有理想的控制性能。
涡轴发动机;BP神经网络;PID控制;功率反馈;功率平衡;功率误差
0 引言
PID控制器具有原理简单、使用方便的特点,已在航空、机电、冶金、机械和化工等行业中获得了广泛应用[1]。但是,当被控对象含有强非线性和时变特性时,传统的PID控制器往往难以获得满意的控制效果。航空发动机是1种强非线性的被控对象,其飞行特性在不同工况和飞行条件下将发生很大变化,而传统的PID参数是根据对象数学模型的特定适应规则整定的,并且随着对发动机性能要求的日益提高,设计出1个能在全包线下对发动机进行控制、且能达到满意性能的PID控制器是非常具有挑战性的[2]。随着控制理论的发展和FADEC的日渐成熟,各种先进控制方法层出不穷,且被应用于航空发动机的尝试和相关研究文献也日渐增多[3-7]。
目前,人工智能与PID控制相结合并应用在发动机控制中已有研究。文献[8]提出了1种发动机自适应神经网络PID控制方法,对发动机非线性和建模的不确定性具有很好的自适应性和鲁棒性;文献[9]研究了当发动机偏离设计点时,采用神经网络控制,使控制系统保持良好的性能;文献[10]综合了模糊推理、神经网络自适应和PID简单控制的各自优点,建立智能神经网络自适应控制,取得了良好的控制性能;文献[11]采用神经网络控制在全包线范围内获得良好的动、稳态性能,但其神经网络的输入参数只考虑了高度和马赫数,在满足多变量控制时具有局限性。
本文结合BP神经网络与PID控制器,构成了有效的智能神经网络PID控制器,使涡轴发动机在全包线范围内具有理想的控制性能。
1 基于功率反馈的PID控制器设计
涡轴发动机的输出功率是动力涡轮功率,包括旋翼功率、尾桨功率和附件抽功。其中旋翼功率占需用功率的90%以上,所以暂时仅考虑旋翼需用功率。涡轴发动机控制的主要目的是在保证动力涡轮转速不变的情况下实现系统的需用功率与输出功率的动态平衡,即动力涡轮的输出功率必须实时适应旋翼的需用功率。通过反馈功率动力涡轮输出功率,并与旋翼需用功率进行比较,将二者的误差信号作为PID控制器的输入层信号,从而给出供油量调节规律,实现涡轴发动机的良好控制。基于功率反馈的涡轴发动机控制系统如图1所示。图中:PA为旋翼功率;PP为动力涡轮功率;e=PA-PP,为功率误差信号;WFB为燃油量。在PID控制器作用下,误差值e逐渐趋于0,实现了旋翼需用功率与动力涡轮输出功率平衡。
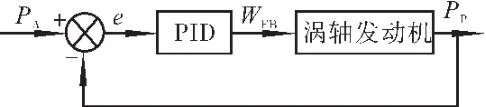
图1 基于功率反馈的涡轴发动机控制系统
传统的发动机控制器设计都是将涡轮转速或压比作为反馈信号,存在一定的滞后性。当旋翼功率与动力涡轮功率不平衡时,不能及时反映到燃油的控制上,而是先通过部件传动转化到涡轮转速控制上,进而对燃油需求进行控制。本文提出的基于功率反馈设计控制器,能够迅速地反映动力涡轮与旋翼的功率动态平衡情况,当功率动态平衡波动,即被控量与输入量之间存在偏差时,通过控制器能实时并快速反映到燃油供给上。
2 基于功率反馈的涡轴发动机智能神经网络PID控制器设计
PID控制器要获得期望的控制效果,必须合理调整好比例、积分和微分3种控制作用,形成控制量中既相互配合又相互制约的关系,这种关系不一定是简单的“线性组合”,从变化无穷的非线性组合中可以找出最优的控制参数[12]。传统的PID控制器结构具有简单、鲁棒性强和操作简单等优点,缺点是PID 3个控制参数整定困难,而神经网络具有任意非线性的表达能力,因此将BP神经网络引入到PID控制参数整定中[13],建立参数kP、kI、kD自学习的PID控制器。
2.1 BP神经网络
BP神经网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示或描述这种映射关系的数学方程。其学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络误差平方和最小。误差的反向传播将网络的控制信号实时传回神经网络中,对网络权值进行修正,适应实时变化的误差信号。BP神经网络模型拓扑结构包括输入层、隐含层和输出层,如图2所示。

图23 层BP神经网络结构
从图2中可见,3层BP神经网络有j个输入、i个隐含和l个输出神经元。输入、输出神经元之间用隐含神经元作映射传递。对于输入信号,先向前与网络的反向权值Wij作用后传递到隐含层,经过作用函数后,再把隐节点的输出信号与网络的反向权值Wli作用后传播到输出节点,经激励函数作用后输出结果。
2.2 控制算法
以某涡轴发动机部件级模型为对象进行仿真控制研究。基于本文提出的功率反馈原理,采用输入层j=3、隐含层i=5和输出层l=3的BP神经网络,并选定rin=PA、yout=PP和e=rin-yout,即旋翼功率、动力涡轮功率和功率误差定义为神经网络的输入,经过输入层后输出不变。
网络输入层的输入、输出均为
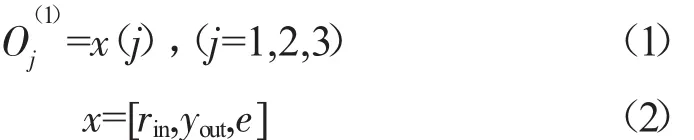
网络隐含层的输入、输出为

网络输出层的输入、输出为
式中:上角标(3)为输出层,其输出节点分别对应3个可调参数kP、kI、kD,由于3个参数不能为负值,所以输出层神经元的活化函数取非负的Sigmoid函数

取性能指标函数

按照梯度下降法修正网络的权系数,即按J(k)对加权系数的负梯度方向搜索调整,并附加1个使搜索快速收敛全局极小的惯性项

式中:η为学习速率;α为惯性系数。

由于系统的误差e=PA-PP,当系统受到干扰、改变总距操作杆和油门杆时,e会突变,导致过大,反向传递的值激增,使加权系数脱离控制,引起系统超调或者失效,从而无法满足控制要求,降低了系统的鲁棒性。输出量ΔU为


经仿真试验,将θ=0.01作为最佳限幅值。同理可得隐含层加权系数的学习算法
2.3 涡轴发动机平衡关系分析及智能神经网络PID控制
在发动机部件级模型控制中,当燃油量增加,涡轮进口燃气温度升高时,引起动力涡轮功率和与旋翼功率有关的物理转速百分比均增大,而旋翼功率与物理转速百分比成正比关系,因此旋翼功率在一定程度上增大,其需求功率增大将迫使燃油继续增加,再返回继续循环,如图3所示。
在基于功率反馈进行控制器设计时,如果没有1个有效的平衡控制点,系统将出现2种循环情况:旋翼功率和动力涡轮功率在燃油一直增大的情况下继续增大,或在燃油一直减小的情况下继续减少。对系统来说,这2种情况均不希望出现,在这样的循环下系统必须能自主找到1个突破循环的控制点,传统的PID控制由于kP、kI、kD参数是人为根据经验或特定规则设定的,而在全包线范围内则要通过模糊规则进行分区段控制。
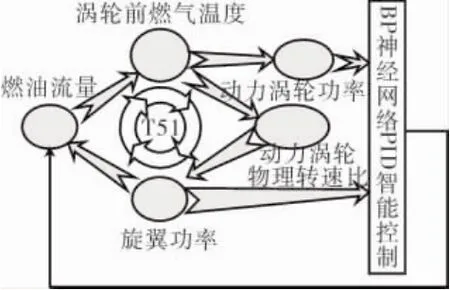
图3 涡轴发动机平衡关系
通过BP神经网络与PID控制相结合,由于系统不断在线学习,即神经网络对控制参数不停地训练,周而复始的信息正向传播和误差反向传播,各层权值不断调整,直到寻找到系统控制的1个稳定点,即旋翼功率与动力涡轮功率摆脱循环的1个平衡点,从而实现负载功率与输出功率的平衡。
2.4 系统控制结构
基于功率反馈的涡轴发动机神经网络PID控制系统的结构如图4所示。
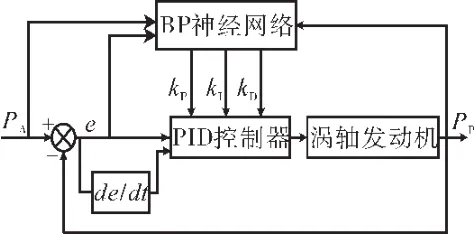
图4 基于功率反馈的涡轴发动机神经网络PID控制系统
从图4中可见,BP神经网络包括正向和反向传播,其中旋翼功率与动力涡轮功率都是由模型在迭代运算过程中计算得到。在回路中,输入信号旋翼功率、输出信号动力涡轮功率和功率误差信号构成BP神经网络的输入,在线调整权值修正kP、kI、kD,在PID控制器中,修正后的kP、kI、kD,与控制器输入信号作用后得到需求燃油量大小的控制信号,该信号作用于涡轴发动机,维持发动机的输入、输出功率平衡。
3 控制系统仿真
基于某型涡轴发动机部件级模型数字仿真平台进行研究,控制器以旋翼与动力涡轮功率差为误差信号,综合运用BP神经网络与传统PID控制的优点设计了智能PID控制器。为了进行对比,同时设计了传统PID控制器并给定正确的PID参数。
在飞行高度H=0,飞行马赫数Ma=0条件下进行仿真试验,结果如图5、6所示。
从图5中可见,从启动到系统平衡过程中,采用传统的PID控制是采用本文方法所得的超调量,而其的2倍,造成供油浪费,系统的经济性能差。
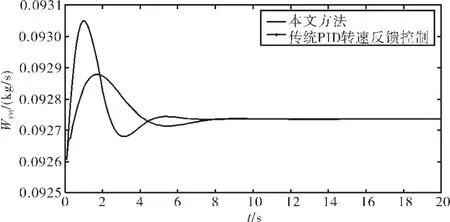
图5 燃油量控制曲线

图6 动力涡轮-旋翼功率控制曲线
从图6中可见,采用本文方法的2条功率曲线几乎重合,说明采用该方法使得发动机输出功率与旋翼负载需用功率一直处于动态平衡,且最后达到稳态平衡需用的时间也较短;而传统的PID控制虽然也有良好的跟踪效果,但在动态过程中存在一定的功率偏差,且在稳态过程中功率不平稳,动态过程耗时偏长,影响发动机和直升机的整体飞行性能。
以上2种不同条件下的仿真结果表明,本文设计的基于功率反馈的智能PID控制器对涡轴发动机具有良好的控制效果。可见,结合BP神经网络与PID控制,并改进权值学习规则,控制器在发动机状态不断变化的过程中持续学习,实时整定控制参数,通过功率反馈的调节作用,系统拥有1个良好的动、稳态平衡过程;同时加快了系统动态响应速度,增强了系统的鲁棒性,提高了控制器的效率和性能。
4 结束语
本文设计的基于功率反馈的神经网络PID控制器融合了BP神经网络和传统PID控制的优点。由于将功率引入到神经网络中作为输入层参与控制调节,并在算法中改进了网络权值的学习规则,提高了系统控制效率,同时以动力涡轮功率作为反馈与旋翼功率进行误差分析,得到了燃油的控制规律,加快了系统的响应速度,使系统具有良好的稳态和动态响应特性。
目前虽然难以直接测量动力涡轮功率与旋翼功率,但是可以通过大量试验获取功率与涡轮进口燃气温度、飞行高度、马赫数和总距等相关变量的数学关系式,建立动力涡轮与旋翼的高精度功率模型,从而更好地运用本文所提出的基于功率反馈的神经网络PID控制方法。
[1]王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
[2]姚华,袁鸯,鲍亮亮,等.航空发动机神经网络自学习PID控制[J].推进技术,2007,28(3):313-316.
[3]Bica B,Chipper F A J,Fleming P J.Towards fuzzy gain scheduling for gas turbine aeroengine systems:multiobjective approach[C]∥Proceedings of IEEE International Conference onIndustrialTechnology2000.Murbia,India:Jaico Publishing House,2000:19-22.
[4]杨刚,孙健国.一种新的H∞/LTR控制系统设计方法[J].航空学报,2004,25(2):104-107.
[5]黄金泉.航空发动机神经网络自适应控制[D].南京:南京航空航天大学,1998.
[6]Turner M C,Bates D G,Postlethwaite I.Input/output conditioningofrobustintegratedflightandpropulsion controller[J].Journal of Guidance,Control and Dynamics, 2001,24(6):1089-1099.
[7]包睿,黄金泉.航空发动机反馈神经网络自适应控制方法[J].航空发动机,2007,33(4):46-49.
[8]蒋衍君,黄金泉.航空发动机自适应神经网络PID控制[J].航空动力学报,2000,15(3):334-336.
[9]郭迎清.航空发动机神经网络自适应控制研究[J].航空动力学报,2001,16(1):83-86.
[10]赵俊,陈建军,王灵刚.航空发动机的智能神经网络自适应控制研究[J].航空动力学报,2008,23(10):1913-1920.
[11]姚华,鲍亮亮,孙健国.基于神经网络的航空发动机全包线PID控制[J].南京航空航天大学学报,2007,39(2):236-239.
[12]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003:162-164.
[13]Willis M J,Montague G A.Auto-tuning PI(D)controllers with artificialneuralnetworks[C]//12thWCIFAC,Sydney, Australia,1993:61-64.
Neural Networks PID Control of Turboshaft Engine Based on Power Feedback
DUAN Shao-dong,XIAO Ling-fei,SHEN Tao
(College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
An intelligent neural networks PID controller based on power feedback was proposed by analyzing power balance.Based on BP neural network,the power signal was taken as the input layer signal,and the network weight learning rules was improved.According to on-line setting of PID parameters,the controller parameters was adjusted by the changes of power error signal,to find the power balance point independently and obatain excellent steady and dynamic response characteristics of system.The simulation results show that the turboshaft engine has satisfied control performance over the whole envelope.
turboshaft engine;BP neural network;PID control;power feedback;power balance;power error
国家自然科学基金(61004079)资助
2011-11-17