多关节机械手在晶圆减薄机中的应用
2012-06-28衣忠波王仲康
衣忠波,石 伟 ,王仲康,常 亮
(1.北京中电科电子装备有限公司,北京100176;2.北方通用电子集团有限公司,陕西西安710100)
集成电路芯片不断向高密度、高性能和轻薄短小方向发展,为满足IC封装要求,图形硅片的背面减薄成为半导体后半制程中的重要工序。作为晶圆减薄设备的关键部件,机械手负责晶圆在各个工位的传输。其优点在于:动作灵活、运动惯性小、通用性强、能抓取晶片在各个工位之间传输。随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。目前,在半导体行业多关节机械手应用十分广泛,除了全自动晶圆减薄设备外,在化学机械抛光、晶圆清洗、测试、包装等设备中都有广泛的应用。图1为晶圆减薄机布局图。
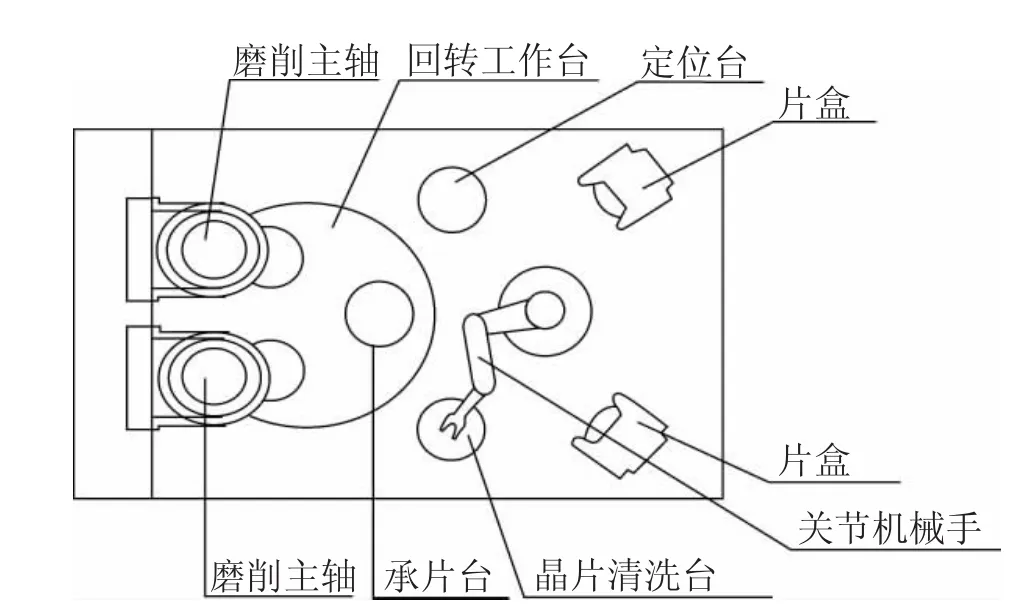
图1 晶圆减薄机布局图
1 工艺介绍
全自动晶圆减薄机的典型工艺流程如图2所示,它包括:利用多关节机械手把晶圆从片盒位置搬运到定位台,定位完成后,机械手把晶圆从定位台搬运到承片台,然后依次通过粗磨、精磨完成对晶圆的磨削,机械手再把减薄完成的晶圆搬运到清洗台进行清洗,清洗完成后,再把晶圆搬运到片盒,从而完成一个晶圆的全自动磨削过程。机械手结构见图3、图4。
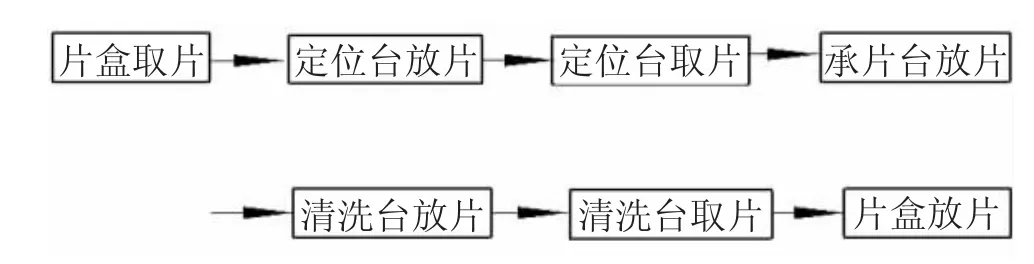
图2 晶圆传输工艺过程
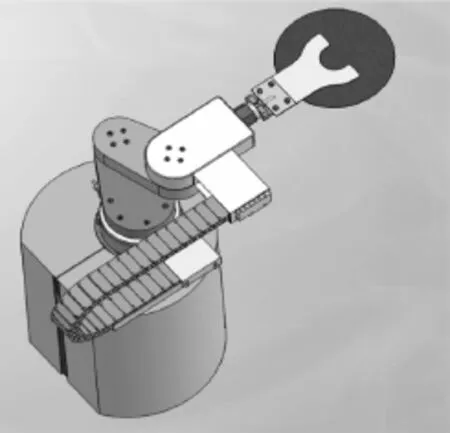
图3 多关节机械手三维图图
2 关节机械手的组成部分
多关节机械手按照减薄设备的工艺需要应包括4个自由度,即手爪的水平方向ρ伸出和缩回、系统θ向的旋转、系统Z向升降和手爪ω向的翻转。
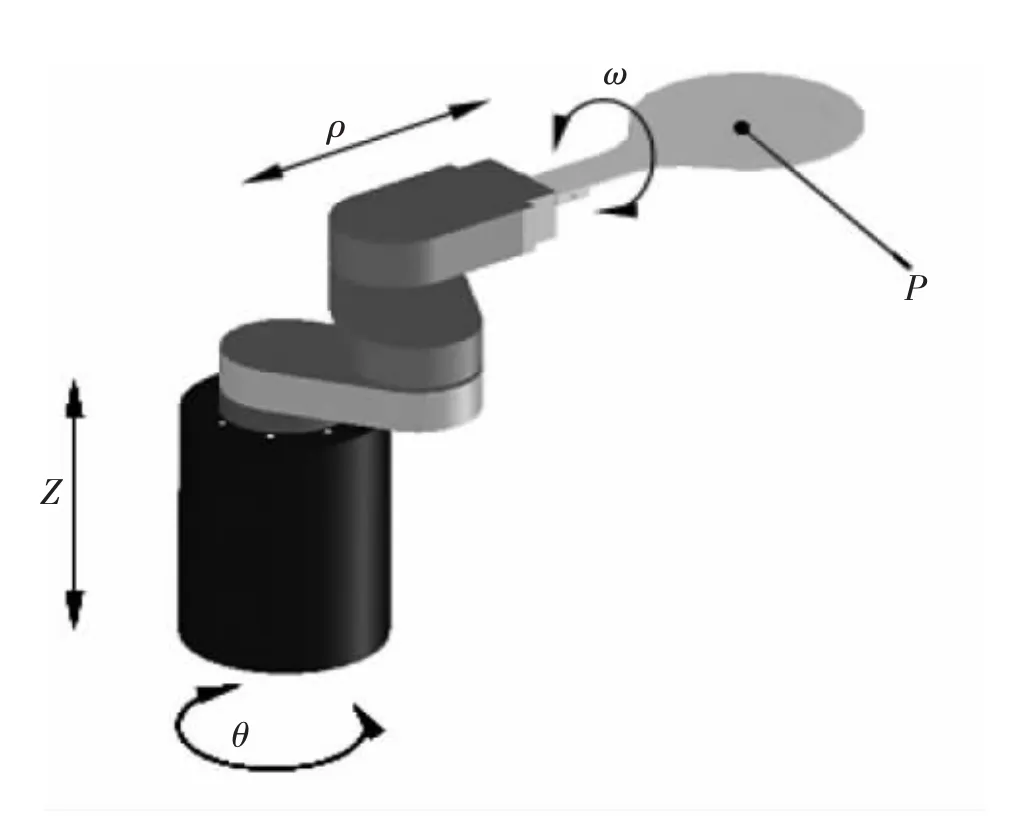
图4 机械手结构示意图
2.1 Z向升降系统
Z向系统实现整个系统的升降动作要求,主要是为了满足各个工位高度变化的要求,采用伺服电机的驱动方式实现机构升降,满足机械手Z向精度±0.05 mm,同时保证了传输效率。
2.2 旋转系统
旋转系统主要是为了满足磨削传输过程,工位变化的要求,采用伺服电机的驱动方式实现机构旋转,满足机械手旋转精度2′。
2.3 水平伸缩系统
伸缩系统实现手爪的水平伸出、收回动作,主要因为各个工位距离旋转中心位置的不同,实现伸缩到位。采用DD电动机直接驱动的方式实现关节的水平伸缩,可以在不带减速机的状态下直接驱动负载,并且实现从低速至高速的强力平滑运行,满足机械手伸缩重复定位精度±0.1 mm。
2.4 手爪的翻转系统
翻转系统实现手爪的翻转,为了满足取、放片工艺要求。采用步进电机驱动方式,保证了机构翻转的可靠性,以及翻转重复定位精度3′。
3 控制系统
机械手采用独立的控制系统,可以单独形成一个标准部件系统控制,它的动作涉及了Z轴、θ轴、ω轴和ρ轴的运动,Z轴为升降运动;θ轴为旋转运动;ω为翻转运动;ρ轴为伸缩运动。主要考虑了开放性、经济性、实用性、可靠性等方面。
机械手运动共有4个工位,分别为:片盒1、片盒2、中心定位台和清洗台。机械手控制的重点在于对运动的重复精度、平稳度以及精确度的控制。
机械手电气硬件主要包括:触摸屏、可编程控制器单元、定位控制模块、与主站通信单元、交流伺服驱动单元、步进驱动单元、电源控制部分、继电器、传感器、阀等,通过触摸屏可以实现机械手的独立控制模式。见图5。
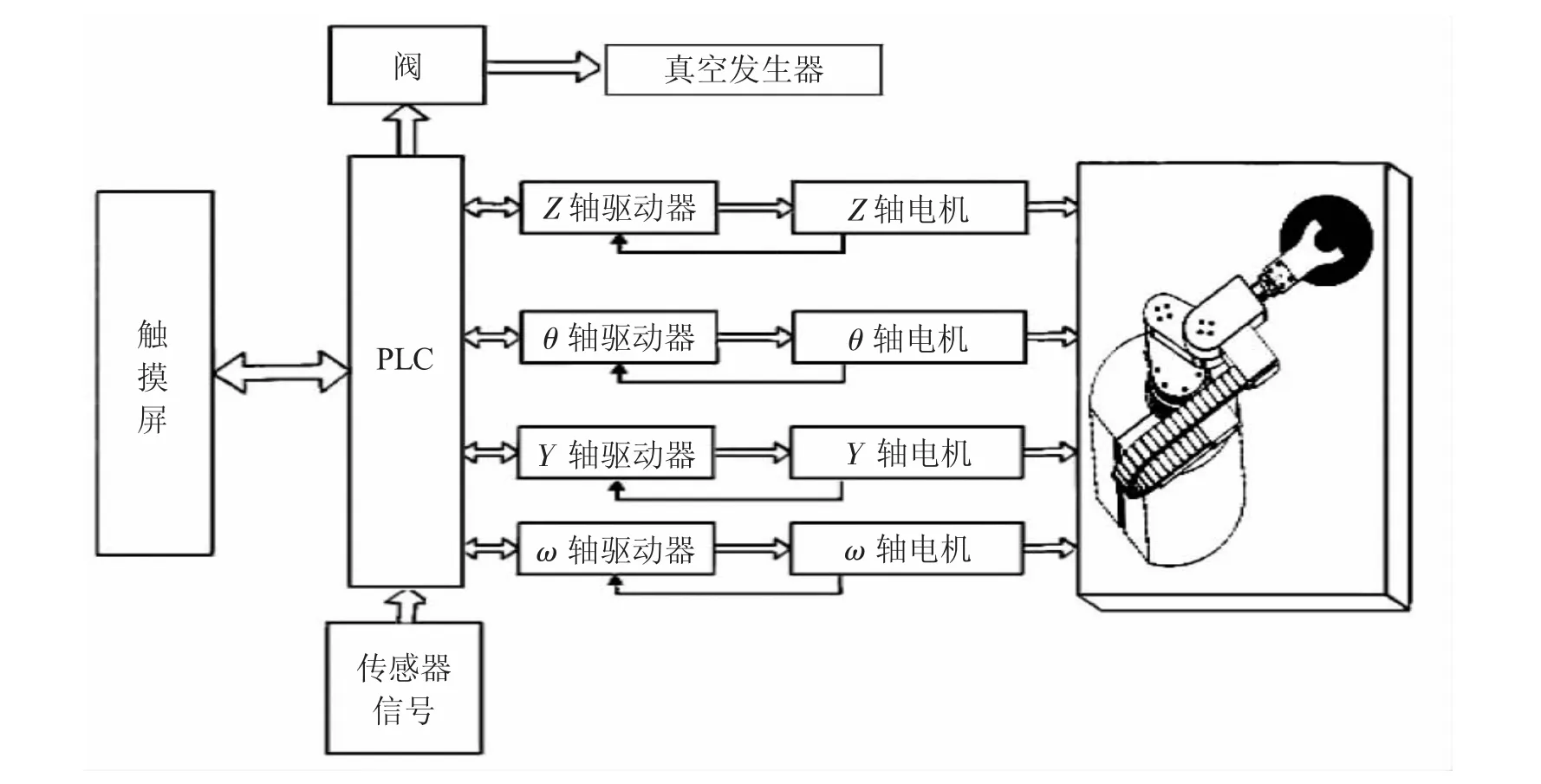
图5 机械手控制框图
4 相关技术发展状况

图6 六自由度多关节机械手
在国外,多关节机械手技术发展较为成熟,已成为一种标准设备而得到工业界的广泛应用,从而形成了一些世界上比较有影响力的传输机械手公司,如日本的Rorze公司、Yaskawa公司、Jel公司,美国的Adept公司、Innovative公司,韩国的Dastatech公司、TES公司等,现在已发展出多种新型式机械手,如真空式机械手、洁净空间机械手。国外机械手在国内售价都较为昂贵,设备将产生极大的成本压力。图6为六自由度多关节机械手。
在国内,集成电路产业起步比较晚,用于晶片传输的多关节机械手发展较为滞后,能够实现四自由度的要求,但在可靠性、稳定性方面,难以满足设备的工艺要求。中国电子科技集团公司地四十五研究所开发的四自由度多关节机械手通过JB-801,JB-802两代晶圆减薄机的工艺应用,可靠性、稳定性均能满足传输工艺要求。并通过研究应用,开发了应用于晶圆清洗设备的多关节机械手。见图7、图8所示。

图7 JB-802晶圆减薄机多关节机械手

图8 晶圆清洗设备的多关节机械手
5 结束语
半导体晶片在各个加工工序之间进行加工处理是离不开晶片传输机械手的传输和定位,直接体现出整机系统自动化程度和可靠性,随着自动化程度的提高,多关节机械手在半导体专用设备上的应用越来越广泛,不断地提高机械手的可靠性、稳定性,推广多关节机械手国产化应用,提供物料传输最佳的解决方案,我们需要不断的努力。
[1](美)夸克,(美)瑟达著,韩郑生等译,半导体制造技术[M].北京:电子工业出版社,2009.
[2]王仲康.超薄化芯片[J].电子工业专用设备.2006(11):13~18.
[3]胡耀臻.片子自动传输机械手[J].电子工业专用设备.1979,26(1):39-42.
[4]康仁科,郭东明,张士军,等.一种传输机器人[P].中国:200420113013.1,2004.
