直线电机速度伺服系统的VisSim建模与仿真
2012-05-28范劢超曾岳南吴一祥
范劢超,曾岳南,吴一祥
(广东工业大学自动化学院,广州 510006)
0 引言
直线电机是近年来国际上竞相发展的一种新型电动机,它可以将电能直接转换成直线运动,而不需要任何转换机构的电磁传动装置。在许多的工业领域里,电机要实现工作台的直线运动,在传统的旋转电机传动系统中,必须经过一系列的中间环节及响应的支撑,而直线电机采用直线驱动,具有响应快、精确度高、推力大等优点[1-3]。
目前,基于VisSim进行控制系统的建模、仿真与开发的研究受到更广泛的关注[4]。VisSim是一种功能强大的自动控制建模和仿真软件,该软件包含丰富的控制元件库,还可将其他仿真软件中的元器件容易地转化为通用数学模型。利用VisSim/ECD可将VisSim/Motion设计的控制算法自动生成高质量的C语言定点代码,并直接下载到目标DSP中进行调试,可大大缩短系统的开发和研制的周期[5]。本文分析了PMLSM的数学模型,并运用VisSim/Motion 7.0软件建立了PMLSM的仿真模型,构建了基于动子磁场定向的PMLSM矢量控制系统,给出了仿真结果波形,并且论述了基于VisSim进行控制系统设计的可行性。
1 PMLSM的数学模型
建立永磁同步直线电机模型之前,先做如下假设:①忽略铁心饱和及温度对电机参数的影响;②不计涡流损耗和磁滞损耗;③不考虑边端效应;④不考虑温度等因素对永磁材料的影响,认为永磁体磁场恒定。根据文献[3,6]得出在动子磁场定向控制条件下,PMLSM在d-q坐标系下的数学模型为:


式中,Rs为每相绕组电阻;ψd、ψq为 d、q 轴磁链;ψf为永磁体等效磁链;Ld、Lq为d、q轴电感;ωr为PMLSM动子速度折算成的旋转电机角速度,ωr=πv/τ;v为动子速度;τ为磁极中心距;由式(1)可推导出推力方程为:
式中,Fe为电磁推力;M为动子总质量;Bv为粘滞摩擦系数;FL为负载阻力;Kf=3πψf/2τ定义为电机推力常数。式(1)~(5)构成了PMLSM的d-q坐标系下的电机模型。
2 PMLSM矢量控制系统的VisSim建模
2.1 PMLSM伺服系统总体控制方案
整个控制过程中,采用id=0的动子磁场定向控制,电机推力大小仅与定子q轴电流有关,通过相应的电流控制就能够有效的控制电机的运行速度。因此,PMLSM矢量控制系统采用如图1所示的双闭环控制结构,并对电流环和速度环采用由内到外的顺序进行控制策略的确定和控制器参数的整定。

图1 在VisSim下直线伺服系统的仿真框图

图2 PMLSM仿真模块结构框图
2.2 PMLSM本体模块
VisSim7.0软件本身没有提供PMLSM电机模型的仿真模块,基于前面讨论的PMLSM数学模型,可以建立PMLSM仿真模块。PMLSM仿真模块包含电压变换模块、d-q轴电流计算模块(图3)、电磁推力与机械运动模块(图4)。

图3 d-q轴电流计算模块
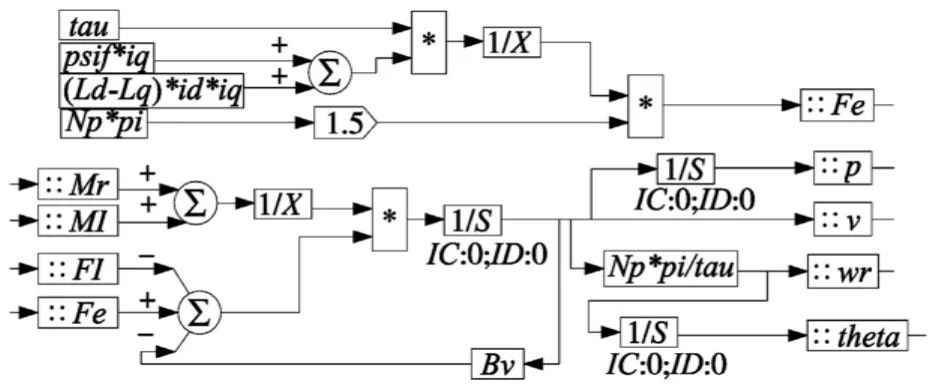
图4 电磁推力与机械运动模块
2.3 矢量控制模块
矢量控制的基本思想是:把三相静止坐标系下的定子电流ia、ib、ic,通过三相 /两相变换,等效成两相静止坐标系下的交流电流iα、iβ,再经过转子磁场定向的旋转变换,等效成两相旋转坐标系下的电流id、iq,矢量控制模块实现的就是abc三相向dq两相的变换。VisSim7.0软件中已提供了Clarke Transform和Park Transform模块,如图1所示。
2.4 变增益PI模块
常规PI控制器已在控制系统中广泛使用,其结构可表示为:

比例kp作用是减小偏差和加快响应速度,缩短调节时间,但kp又受到系统稳定性的限制,不能任意增大;为了消除静差,引入了ki,然而ki的引入又使得响应快速性下降,稳定性变差,尤其是在偏差较大的阶段的积分往往是系统响应出现过大的超调,调节时间边长。
所采用的变增益PI控制器原则是:在e较小时,取较小的kp值,e较大时则取较大kp值,以有利于加快响应速度,同时保证有很好的稳定性;在e较小时,取较大的ki值,e较大时则取较小ki值,以有利于加快对小偏差的反应速度,提高控制器对干扰的灵敏度。
首先定义g[e(t)]为kp的系数、f[e(t)]为ki的系数,则VGPI的控制器表达式为:
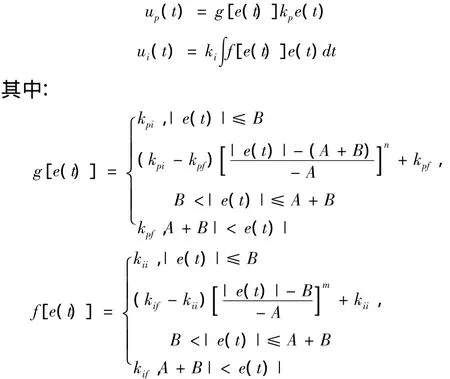
暂态多项式的维数n定义为VGPI的维数。当取n=3、m=1时,g[e(t)]和f[e(t)]的图像如图5所示。
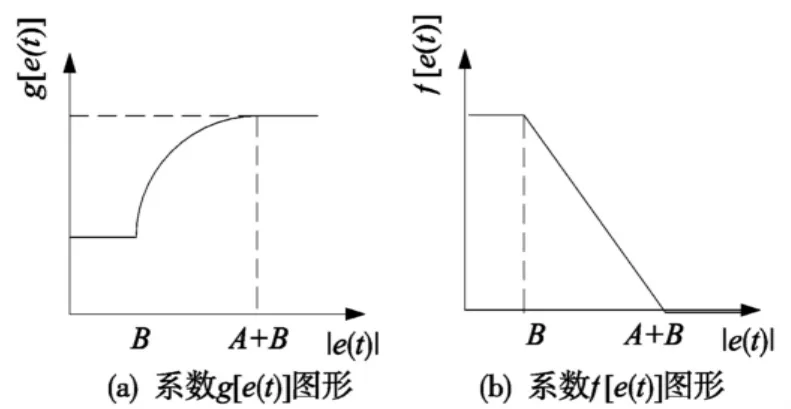
图5 系数g[e(t)]和系数f[e(t)]图形
为确定VGPI控制器参数,按以下方法进行整定:
(1)为了克服负载扰动,选择1个较大的kif和1个恰当的饱和时间A+B,积分初值定为0。
(2)按照减少超调的原则确定kpi和kpf。
(3)若不能有效抑制速度超调,则不断调整饱和时间A+B,不断重复以上步骤,直到满意为止。
在VisSim7.0中搭建的VGPI控制器模块如图6所示。

图6 VGPI控制器结构图
3 仿真结果
在VisSim的仿真环境下对上述建立的系统进行仿真,参数设置为:np=1;Ld=0.0267H;Lq=0.0267H;ψf=0.24Wb;Mr=3.6kg;τ=0.018m;Bv=0.2N·s/m;Rs=2.6Ω。系统在整个仿真过程中动子载物Ml=2kg。
用工程方法整定PI控制器参数得:电流环kp=200,ki=1800;速度环 kp=100,ki=1200。用 VGPI控制器代替速度环传统的PI控制器后,进行分析对比,取VGPI控制器参数为:B=0.001,A=0.2,k'p=100,k'i=1200,kpi=1.8,kpf=0.3,kii=0,kif=1。t=0s时给定速度指令0.5m/s,在t=0.2s时突加扰动阻力Fl=200N,在t=0.4s时保持扰动阻力Fl=200N并给定参考速度为v=1m/s,系统速度响应波形如图7a所示。保持2个控制器的参数不变,给定速度指令3m/s同时施加阻力Fl=200N,系统速度响应波形如图7b所示。

图7 速度响应对比结果
由仿真波形可以看出:在速度指令为0.5m/s时,PI控制器的超调为9%,而VGPI控制器的超调为4%。在速度指令在3m/s时,常规PI控制器的超大为13%,而VGPI控制器的超调为4%。而在调节时间方面,VGPI具有更明显的优势。可见,常规PI控制器在使用同一组固定参数时,难以在低速和高速状态下都有很好的控制效果。VGPI控制器不仅有效的减少了系统的超调,而且调节时间很短,具有快而稳的控制性能。
图8a、b为图7a仿真过程中VGPI控制器的比例系数 g[e(t)]kp和积分系数 f[e(t)]ki的调整过程。比例系数和积分系数根据偏差的情况在线实时调整,使系统具有一定的自适应能力。

图8 比例增益g[e(t)]kp与积分增益f[e(t)]ki调整过程
4 实验
电机为科尔摩根公司的PLATINUM直接驱动直线电机(DDL),动子型号为IC11-050A1ACTRC1,定子型号为MC050-1280-001,光栅尺采用GSI公司的MicroE M-Ⅱ4400增量式直线光栅编码器,其分辨率为0.1μm/count。其中永磁同步直线电机主要参数和仿真使用的参数一致。
经实验调试,电流环PI参数设置为:KP=2.12,KI=4310。进行电流闭环验证时,给定速度 v=0.5m/s,取PI控制器参数为:KP=15.6,KI=850,利用SramtPrecision II Software记录速度环相应波形如图9。使用VGPI替换传统PI控制器,取VGPI控制器参数为:B=0.001,A=0.2,kpi=1.43,kpf=0.64,kii=0,kif=1。记录速度响应波形如图10。

图9 常规PI控制速度相应

图10 VGPI控制速度响应
实验结果和仿真结果基本一致,采用VGPI控制不仅使伺服系统达到了更好的动态特性,而且保证了系统的高精度。
5 结束语
本文在分析了PMLSM的数学模型后,建立Vis-Sim的PMLSM控制系统仿真模型,为实际的控制系统提供了一个理论分析工具。为改善一般PI控制器性能,引入变增益PI控制,使整个控制系统获得了更好的控制效果。仿真和实验结果表明,VGPI控制器比一般的PID具有更加优越的性能,能够很好的消除或抑制速度超调和更快的调节时间。
在VisSim环境下进行PMLSM系统的仿真,可以快速实现和验证控制算法,通过加入不同的扰动因素和修改系统变量参数来考证系统的动、静态性能,也可以模拟实际的实验条件和使用不同控制策略下控制系统的性能。为研制出高性能的永磁同步直线电机伺服驱动器及寻求高性能的速度环、位置环控制方案奠定坚实的基础。
[1]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.
[2]陈幼平,张代林,艾武,等.基于DSP的直线电机位置伺服控制策略研究[J].电机与控制学报,2006,10(1):61-65.
[3]Ying-Shieh Kung.Design and Implementation of a High-Performance PMLSM Drives Using DSP Chip[J].IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS,2008,55(3).
[4]沈艳霞,纪志成,姜建国.基于VisSim的无刷直流电机的仿真模型[J].电机与控制学报,2003,7(4):294-298.
[5]谢文涛,童玲.基于VisSim/ECD的直流电机控制系统设计[J].单片机与嵌人系统应用,2006(6):39-41.
[6]Yuan Xue,Jun Cheng,Xiangyang Gao,Min Zou;Modeling and simulation for the Permanent Magnet Linear Synchronous Motor based on space vector pulse width modulation[J].World Congresson IntelligentControland Automation(WCICA),2010:3620.
[7]吴一祥,曾岳南.直线电机速度伺服系统的变增益PI控制[J].组合机床与自动化加工技术,2010(11):60-63.
[8]A.Miloudi,E.A.Al Radadi,A.Draou,Y.Miloud.Simulation and Modelling of a Variable Gain PI Controller For Speed Control of a Direct Torque Neuro Fuzzy Controlled Induction Machine Drive[C].Conf. Rec. PESC '04,Aachen,Germany,20 -25 June 2004.
[9]Miloudi,A.;Alradadi,E.A.;Draou,A.;A simplified speed controller for direct torque neuro fuzzy controlled induction machine drive based on a variable gain PI controller[C].Power Engineering and Optimization Conference(PEOCO),20104th International Conference.
[10]郭庆鼎,王成元.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000.
