龙门机床几何误差建模与补偿研究*
2012-05-28刘宝俊梁睿君叶文华
刘宝俊,梁睿君,叶文华
(南京航空航天大学机电学院,南京 210016)
0 引言
机床的加工精度随着生产自动化技术的飞速发展和精密制造技术的广泛应用,现代制造业对数控机床提出了更高的要求。数控机床逐渐向高精度、高速度、精密化、智能化方向发展。机床的精度直接影响了工件的加工精度。大量研究表明:几何误差和热误差对机床精度的影响程度,可以占到70%[1]。对此,国内外专家学者对误差辨识和误差建模以提高机床加工精度进行了大量的研究,并取得了显著的成果[2-8]。
本文针对某公司龙门机床几何误差部分,通过分析机床结构和误差源,利用多体运动学理论[9],推导了龙门机床共计34个误差元素的几何误差数学模型,并对该机床几何误差模型进行了简化,最后给出了可实施的误差补偿策略,为机床实施误差补偿提供了理论依据和方法。
1 机床结构描述及坐标系设定
本文所研究机床为龙门移动式立式铣车床,可完成内外圆柱面、内外圆锥面、平面及曲面加工与钻、铰、攻丝、镗孔及铣削,适用于各种行业回转类零件的单件和批量加工。该机床主要由床身、龙门(立柱)、横梁、滑鞍、滑枕、回转工作台等构成龙门机床立式总体布局。机床结构及其拓扑结构分别如图1和图2所示。
根据多体系统运动学理论,龙门机床坐标系设定:床身为惯性体B0:O0-X0Y0Z0;龙门为B1体(X轴):O1-X1Y1Z1;横梁为B2体(W轴):O2-X2Y2Z2;滑鞍为B3体(Y轴):O3-X3Y3Z3;滑枕为B4体(Z轴):O4-X4Y4Z4;回转工作台为B5体:O5-X5Y5Z5。

图1 龙门机床结构示意图
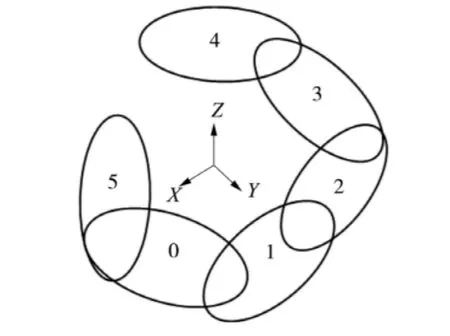
图2 龙门机床拓扑结构图
2 龙门机床几何误差分析
由于零部件几何误差的存在,当机床运动部件在移动或者转动时,使得机床在三维空间6个自由度上表现出6项误差元素。如图3所示在移动副运动时,表现出的6项误差元素为:在沿X轴运动方向的线位移误差 δx(x)及2个直线度误差 δy(x)、δz(x),还有3个转角误差分量,即滚转角误差εx(x)、仰俯角误差εy(x)和偏摆角误差εz(x)。如图4所示转动副转动时,表现出的6个误差元素为:在坐标系3个方向的移动误差 δx(z)、δy(z)、δz(z);绕坐标轴3个轴的转角误差 εx(z)、εy(z)、εz(z)。其中下标为误差运动方向。同时运动部件之间还存在垂直度误差和平行度误差。
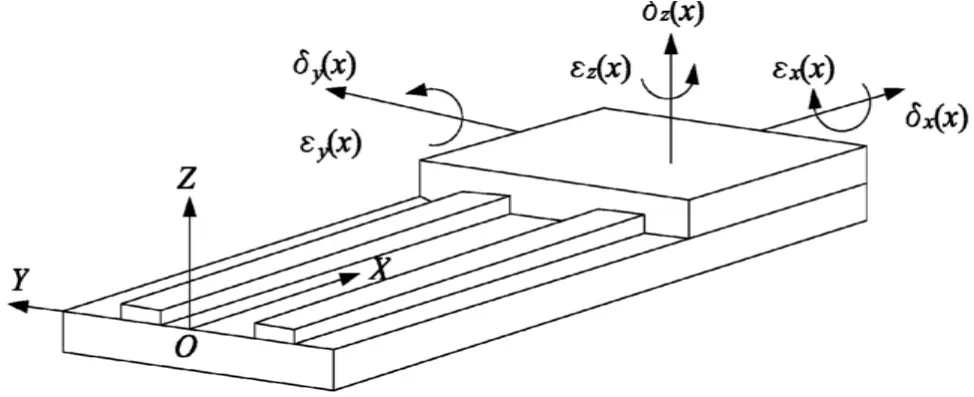
图3 X向移动副运动误差元素
本文通过对龙门机床各个主要运动部件包括X方向龙门(立柱)、W方向横梁、Y方向滑鞍、Z方向滑枕和绕C轴回转工作台的分析得出了龙门机床的34项几何误差元素。所有的误差元素具体如表1所列:

图4 绕Z轴转动副误差元素
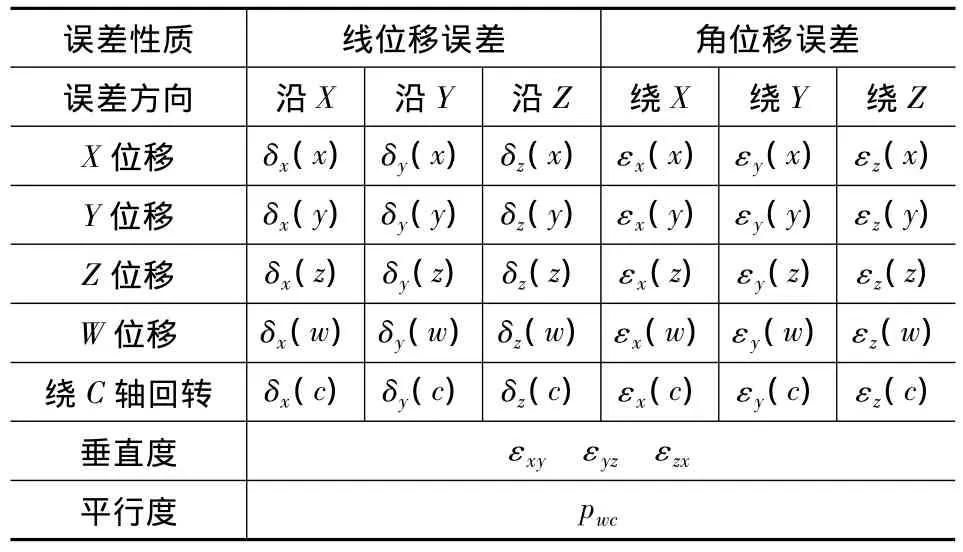
表1 龙门机床34项误差元素
对于各类误差的方向作如下规定:对于位移误差,误差方向与对应的坐标轴同向时为正;对于转角误差,规定误差角度转动的方向与其所绕转轴成右螺旋时为正;对于垂直度误差,规定使发生误差的两轴之间的夹角大于90°时为正;对于平行度或与平面角度误差,规定误差角度转动的方向与其所绕转轴成右螺旋时为正。
3 建立龙门机床几何误差数学模型
根据多体运动学理论,推导龙门加工中心几何误差模型。从龙门加工中心结构示意图和拓扑结构可以看出,对于工件-床身运动链有1个运动副串连而成,且为转动副;对于刀具-床身运动链有4个运动副串连而成,且都为移动副。
首先,分别沿床身-工件和床身-刀尖2条传动链建立误差运动方程:
(1)床身-工件

其中 Tw=[WXWYWZ1]T,(WXWYWZ)为工件上被加工点在O5-X5Y5Z5中的坐标。为坐标系O5-X5Y5Z5到坐标系O0-X0Y0Z0的运动特征矩阵;PW=(XWYWZW)为工件上被加工点在床身坐标系中的坐标。
(2)床身-刀具

其中Tt=[TXTYTZ1]T。 (TXTYTZ)为刀尖在O4-X4Y4Z4中的坐标。为坐标系O1-X1Y1Z1到坐标系O0-X0Y0Z0的运动特征矩阵为坐标系O2-X2Y2Z2到坐标系O1-X1Y1Z1的运动特征矩阵为坐标系O3-X3Y3Z3到坐标系O2-X2Y2Z2的运动特征矩阵为坐标系O4-X4Y4Z4到坐标系O3-X3Y3Z3的运动特征矩阵;Pt=(XtYtZt)
为刀尖在床身坐标系中的坐标。
如图5所示,在实际加工过程中,龙门加工中心产生的空间几何误差:

式中:Pe,r=(ΔxΔyΔz),Δx、Δy、Δz为龙门加工中心三个方向上几何误差分量。
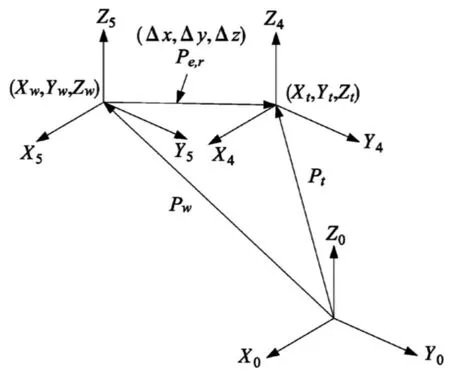
图5 刀具末端几何误差示意图
根据坐标系特性矩阵形成的规律,建立运动部件之间的误差运动特征矩阵。各矩阵如下所示:


式中:O10X、O10Y、O10Z为坐标系原点O1相对于坐标系原点 O0在 X、Y、Z 方向的初始位置偏移,O50X、O50Y、O50Z为坐标系原点O5相对于坐标系原点O0在X、Y、Z方向的初始位置偏移,O21X、O21Y、O21Z为坐标系原点O2相对于坐标系原点O1在X、Y、Z方向的初始位置偏移,O32X、O32Y、O32Z为坐标系原点O3相对于坐标系原点O2在 X、Y、Z 方向的初始位置偏移,O43X、O43Y、O43Z为坐标系原点O4相对于坐标系原点O3在X、Y、Z方向的初始位置偏移。x为龙门在坐标系中X方向上的位移;y为滑鞍在坐标系中Y方向上的位移;z为滑枕在坐标系中Z方向上的位移;w为横梁在坐标系中Z方向上的位移。
将(4)(5)(6)(7)(8)代入(1)(2)(3)可得:
式中龙门加工中心34项误差元素可利用对角线位移法或激光分步对角矢量法测得。将测得的误差元素代入(9)可求出龙门加工中心实际加工点相对于工件理想加工点在三个方向上的整体几何误差分别为 Δx、Δy、Δz。
4 龙门机床几何误差补偿策略
由于所研究的龙门控机床在实际加工过程中龙门(立柱)一般情况下是不移动的,即空间X方向相关的几何误差必定很小且位于误差非敏感方向,对加工精度影响可忽略。因此可以对龙门机床几何误差数学模型进行简化,认为沿X方向即龙门移动方向几何误差 δx(x)、δx(x)、δx(x)、εx(x)、εx(x)、εx(x)都为0。此时 Δx=0,同时对 Δy、Δz也进行了简化,因此在龙门机床几何误差补偿时仅对Y、Z方向的整体几何误差Δy、Δz进行补偿。龙门机床的几何误差补偿方案如图6所示,利用激光干涉仪装置用来测量龙门机床34项几何误差(沿X方向6项误差元素为0),然后将测量结果输入龙门机床几何误差模型,将求得的龙门机床Y、Z方向整体几何误差Δy、Δz用于机床Y、Z轴位置的调整,然后将经误差补偿后的机床Y、Z位置输入机床系统控制器。最后实现龙门加工中心几何误差的补偿。
图6 龙门机床的几何误差补偿方案
5 结束语
(1)本文针对龙门加工中心,根据多体运动学理论建立了该龙门加工中心的几何误差数学模型,分析了机床34项几何误差,为龙门机床几何误差的检测提供了依据。
(2)针对实际加工过程,简化了龙门机床几何误差模型,有效的减少了计算和误差元素测量时间,最后提出了几何误差补偿策略,为龙门加工中心几何误差实时补偿做好了准备。
[1]Ni Jun.A perspective review of CNC machine accuracy enhancement through real-time error conpensation[J].China Mechanical Engineering,1997,8(1):29 -33.
[2]M.Sharif Uddin,Soichi Ibaraki,Atsushi Matsubara,Tetsuya Matsushita.Prediction and compensation of machining geometric errors of five-axis machining centers with kinematic errors.Precision Engineering,2009,33:194 -201.
[3]Abdul Wahid Khan,Chen Wuyi.Systematic Geometric Error Modeling for Workspace Volumetric Calibration of a 5-axis Turbine Blade Grinding Machine.Chinese Journal of Aeronautics 23(2010):604-615.
[4]Yung-Yuan Hsu.Kinematic Parameter-Independent Modeling and Measuring of Three-Axis Machine Tools.World Academy of Science,Engineering and Technology,2011,79.
[5]粟时平,李圣怡,王贵林.基于空间误差模型的加工中心几何误差辨识方法[J].机械工程学报,2002,38(10):121-125.
[6]张虎,周云飞,唐小琦,等.基于激光干涉仪的数控机床运动误差识别与补偿[J].中国机械工程,2002,13(21):1838-1841.
[7]任永强,杨建国,窦小龙,等.五轴数控机床综合误差建模分析[J].上海交通大学学报,2003,37(1):70-75.
[8]粟时平,李圣怡.五轴数控机床综合空间误差的多体系统运动学建模[J].组合机床与自动化加工技术,2003(5):15-18.
[9]刘又午.多体动力学在机械工程领域的应用[J].中国机械工程,2000,11(1):144-149.
