深空自主导航光学敏感器及其验证*
2012-04-17郝云彩王大轶
郝云彩,王大轶
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术重点实验室,北京 100190)
著名的美国DS-1火星探测器于1999年4月成功结束了其飞行任务,验证了20项先进技术,其中一项重要的技术是光学自主导航技术[1-2].此后,深空光学自主导航就由理论方法研究走向了工程实际应用.目前深空自主导航技术已经由传统的地面测量向基于探测器自身携带光学自主导航敏感器的自主导航方向发展,光学自主导航已成为当前国内外深空自主导航发展趋势[3].
深空自主导航敏感器一般分为3类:一是巡航段自主导航敏感器,它在地球启程奔向深空目标的巡航段通过观测多颗小行星角方位,通过滤波计算自主确定飞行探测器在地球惯性坐标系中的位置和速度;二是避障和着陆自主导航敏感器,用于深空着陆寻地的成像识别与着陆导航敏感器;三是环天体自主导航敏感器,指环绕深空天体飞行的自主环绕导航敏感器.本文讨论的是第一种类型.
经过项目调研,了解了近年来国际上对深空巡航光学自主导航敏感器的开发和应用状况,其中与本文所述类型相近,且见诸报道的主要有以下表1所列几种类型.

表1 近年来国外主要巡航段自主导航光学敏感器Tab.1 Some of main overseas optical sensors for autonomous navigation on cruise phase in the recent years
从表1可见,深空光学导航敏感器的共同特点是焦距长、视场小、精度高,针对不同深空探测任务的具体需要,美国、欧空局等发展了一系列的光学导航敏感器,已经具备了比较成熟的深空探测光学自主导航技术,导航敏感器精度高达2μrad(0.41″).
本文首次阐述了所研制的光学导航敏感器原型样机设计、研制情况和关键指标验证问题.
1 光学导航敏感器的特点和技术指标分解
1.1 用于深空自主导航的光学敏感器特点
与其他航天器姿态和导航测量敏感器相比较,深空自主导航光学敏感器的特点如下:
(1)观测量为小行星或者天体表面特征;
(2)具有较高的探测极限灵敏度和动态范围;
(3)优于1″的测量精度;
(4)长焦距和小视场角;
(5)长曝光时间带来复杂的目标像拖影;
(6)更高的消杂光技术要求.
1.2 光学自主导航敏感器原型样机技术指标及其分解
表2为经过论证的光学导航敏感器原理样机的技术指标及其分解.
2 光学系统
2.1 光学系统选型
深空光学导航敏感器光学系统经常选择折反式和反射式.折反式因其消色差和复消色在设计难度、镜头重量、材料和造价上的劣势一般很少采用.考虑了折反式和反射式的优缺点,结合实际要求,选择折反式.因其在设计、加工、装调、小尺寸下大视场角等方面具有较大优势.如图1所示,选择的光学系统结构型式是一种类施密特 -卡塞格林系统[4-5],但是在此基础上进行了改进,其特点是除了保护窗兼作施密特校正板是1个高次非球面外,其余光学面均为球面,且窗口玻璃为平板,便于修磨、安装和调试,且低成本.如图1所示.

表2 光学导航敏感器原理样机的技术指标及其指标分解Tab.2 Technical specification and its details of the ONS’s prototype example
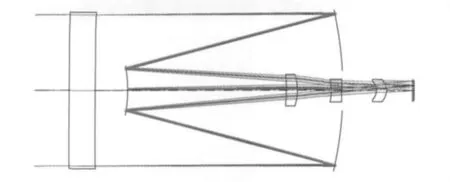
图1 深空光学导航敏感器光学系统结构型式Fig.1 Optical layout of the ONS’s optical system
2.2 光学系统设计结果
经过基于三级像差理论的初始结构参数解算,根据技术性能指标,反复像差平衡和系统优化,得到了满足设计要求的设计结果.其中最大光学畸变设计值为1.3μm,畸变图如图2所示,得到的MTF曲线如图3所示,这是已经考过样板之后的结果,并得到100%概率下MTF平均值大于0.45的公差分配,参见图4.消杂光方案采用2个内部遮光罩和1个外部遮光罩完成消杂光设计.
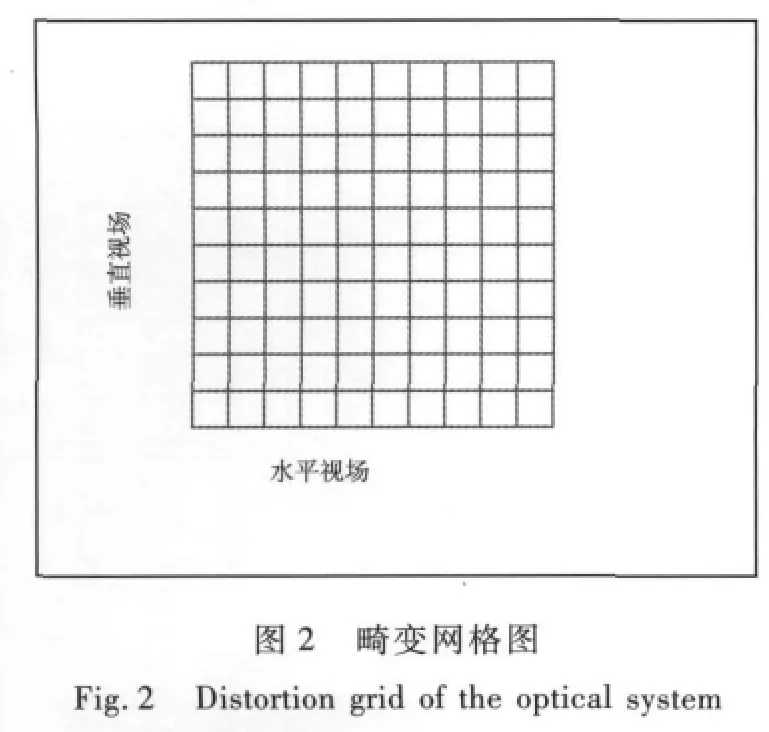


图4 光学系统公差MTFFig.4 The MTF curves vs optical system tolerances
2.3 光学系统结构设计与研制
结构设计有主镜部件、次镜部件、非球面窗口部件、遮光罩、CCD接口等几部分组成,零件约30余件,材料选择考虑光机匹配和热补偿效应,主体镜筒采用钛合金材料,反射镜片采用熔石英玻璃,按照环境力学要求进行全面的光机结构的有限元力学分析,各结构零件均按光机要求完成了加工和表面处理等,结构设计如图5所示,加工实物图如图6所示.这部分工作是与苏州大学现代光学技术研究所协作完成的.


3 整机一体化结构设计和研制
以镜头承力的结构布局方案要求镜头结构既要光学稳定又要承受发射力学条件,所以将比较重,而且将来安装也不方便.为此本文提出了一种模块集成一体化的结构布局方案,如图7所示.主体结构由3部分模块集成,包括镜头模块、支撑模块和电路盒模块.
这一方案要求:保证镜头结构自身的结构稳定性和热稳定性;保证镜头结构安装法兰面位于镜头质心;支撑结构保证整机力学条件下的刚度、强度和整机散热通道;基准镜安装在镜头之上,探测器安装在镜头后端结构上;电路盒保证自身的结构刚度和强度,保证电路板内部连接方便和电磁兼容性,保证散热通道和热控方便,保证接插件位置使用方便合理;整机结构需要进行力学有限元分析,确认设计合理和正确,再进行优化减重处理.实际研制的整机结构如图8所示.

4 电子学系统设计
电子学系统主要包括CCD图像采集电路和数据处理单元(DPU)电路两大部分,前者主要包括差分去直流、两次放大、增益变换、采样保持、AD转换、内部接口等子电路;后者主要包括DSP板电路、图像采集板电路、二次电源电路.电子学系统工作原理图如图9所示.其中DSP板的工作原理图如图10所示.


实际原理样机系统中CCD相机通过DPU输出视频图像还采用了Camera Link接口,通过安装于PC中的图像采集卡进行视频图像的采集与处理.
5 信息处理算法的设计
光学自主导航敏感器的信息处理算法主要是通过对所摄取的小行星及其周边的恒星图像进行处理,获取小行星在测量时刻的惯性空间指向.由于小行星及其周边恒星星等较高,能量很弱,因此所需曝光时间很长,一般在几秒到几十秒,由于深空探测器的姿态指向在曝光时间内发生慢变,因此使得小行星星图呈现“拖尾”复杂形状,因此其处理算法与普通星敏感器有很大区别,也是制约敏感器精度提高的一个关键因素.
深空光学自主导航敏感器信息处理算法主要包括图像预处理、匹配和交叉相关、角距计算、星图识别等几个模块,如图11所示.

图11 信息处理算法流程Fig.11 Flow diagram of the information processing
图12是一个卫星姿态慢变下的小行星和恒星在光学导航敏感器像平面上扫过的仿真轨迹,通过图像与处理得到同一滤波算法下的各个轨迹节点,然后进行匹配和交叉相关运算,得到各个有效节点之间的角距,通过星图识别算法得到小行星在惯性空间的指向,其物理实验仿真精度达到0.2″(1σ),运用有助于精度提高的插值法和模板滤波算法,采用亚像元提取方法确定节点位置.
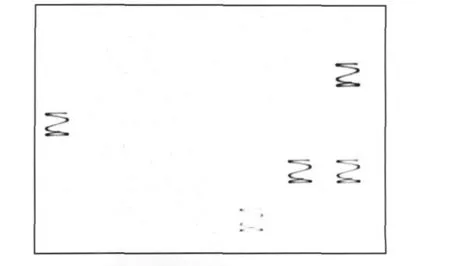
图12 长曝光下的采集的动态星图Fig.12 Dynamic star map captured in long exposing time
6 技术指标验证试验
深空导航光学敏感器原理样机研制完成后,对其整机进行了技术指标测试和性能验证试验.主要验证结果见表3.
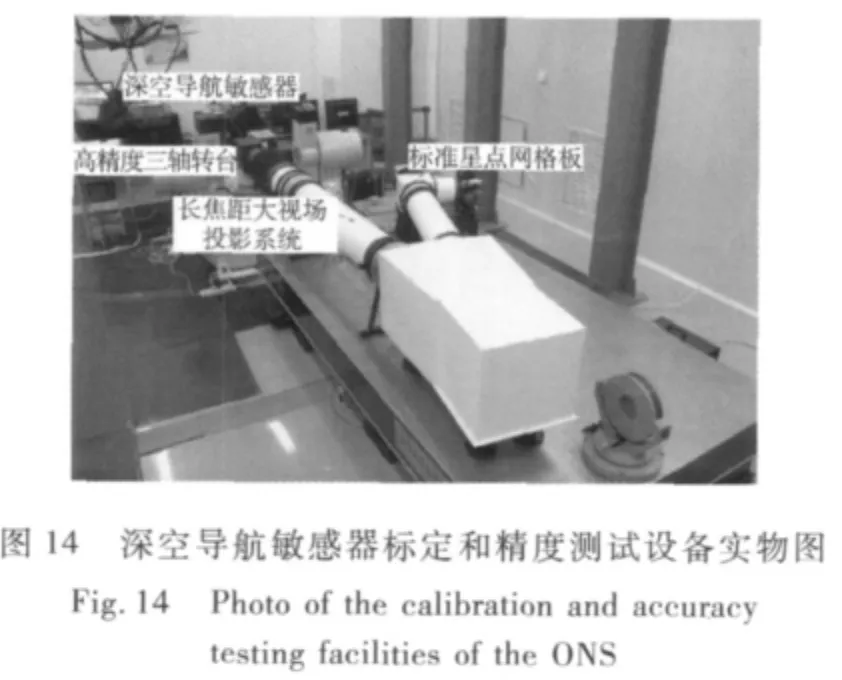
在以上诸多技术指标测量中,其他指标均可按照通常的测量方法完成,唯独精度指标的测量必须采用专门研制的测量设备,限于篇幅在此仅简介精度测量方法.其原理如图13所示,其实物如图14所示,该设备是与长春理工大学协作完成.

表3 参数指标以及验证方法Tab.3 Parameters and validated methods
测量精度涵盖了两方面的误差:一是敏感器静态星点成像误差;二是星点动态成像处理算法误差.
敏感器静态星点成像误差是通过敏感器标定后,利用标准星点网格目标作为比测量,采用实际标定模型在全视场范围内对于网格覆盖各种视场的网格点组合进行敏感器成像测量,得到多组敏感器成像测量的角距值均方差σ1,其均值与标准网格上标准点对角距值非常接近,远小于敏感器精度要求,可以忽略.由于标准网格上标准点对角距测量值均方差为σ2,得到敏感器星点静态成像的误差不大于σ1+σ2.
星点动态成像处理算法误差主要采用动态星图仿真处理的方法,计算同一幅星图在不同指向下的算法精度或者同一个指向不同星点动态成像仿真后的算法精度,用σ3表示.

敏感器最终的精度可表示为:

在测试试验中,得到 σ1=0.2″;σ2=0.183″;σ3=0.2″,按照上式计算得:σ =0.432″.
7 结论
本文在国内首次讨论了深空自主导航光学敏感器的设计和研制问题,提出了其光学设计、整机结构、电子学、信息处理算法等关键技术的技术途径和方案,并在课题组的共同努力下,完成了原理样机的研制,技术指标达到了国际先进水平,为未来我国深空探测自主导航任务的实施奠定了坚实的理论和工程基础.
[1] Rayman M.Results from the Deep Space 1 technology validation mission[C].IAF,the 50thInternational Astronautical Congress,Amsterdam,Netherlands,Oct.4-8,1999
[2] Rayman M D,Varghese P.The Deep Space 1 extended mission[C].IAF,the 51stInternational Astronautical Congress,Rio de Janeiro,Brazil,Oct.2-6,2000
[3] Wright J A,Hilton R J.Multispectral image capture and archival system(MICAS)system description[R].ADA291393
[4] Stauder J L.Off-axis scatter measurement of the mars reconnaissance orbiter(MRO)optical navigation camera(ONC)[C].SPIE 58740L,Bellingham,WA,2005
[5] 潘君骅.一种新型泛卡塞格林系统[J].光学精密工程,2003,11(5):438-441 Pan J H.New pan-Cassegrain telescope system[J].Optics and Precision Engineering,2003,11(5):438-441