线阵CCD在风洞轨迹测量试验技术中的应用研究
2012-04-15段丕轩刘丽萍
梁 磊,段丕轩,刘丽萍,王 丹
(中国空气动力研究与发展中心,四川 绵阳 621000)
0 引 言
线阵CCD作为非接触实时空间位移测量的技术手段在国外已经广泛应用。加拿大NDI公司的Optotrak系统精度可达0.1mm,已用于兰利中心、阿姆斯中心的静弹和颤振试验,以及德国/荷兰风洞(DNW)的机翼变形测量和投放试验[1]。国内清华大学和哈尔滨工业大学开展了类似系统的研究,主要应用于医学辅助和姿态测量,精度为0.36mm[2-4]。同线阵CCD测量技术相比,面阵CCD图像数据量大,受数据传输速度的影响,不可能做到高速实时重建坐标,精度也不够高。相对于面阵CCD,线阵CCD的数据量往往要小数千倍,同时线分辨率往往要高数倍,因此线阵CCD在获取模型姿态角、变形量、振动等参数上比面阵CCD具有更多的优势。
国内利用线阵CCD技术进行空间测量还处在研究阶段,笔者介绍了一种利用线阵CCD技术进行空间轨迹测量的方法。
1 系统组成
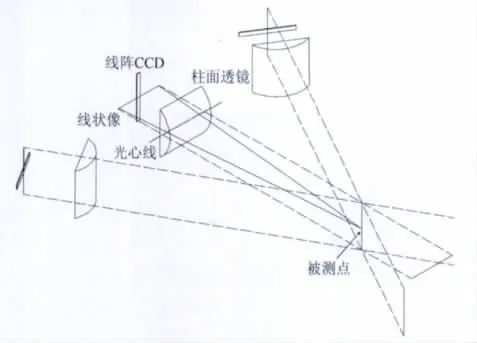
图1 光学系统结构图Fig.1 Schematic of optical system
系统原理见图1,3个一维成像单元组成光学系统,覆盖在同一区域,其中两个相机的柱面镜水平摆放,另外一个相机的柱面镜垂直摆放,能够确定3个相交平面。柱面透镜实现从点到线的光学变换,像点确定一个包含被测点的平面,由3个相交平面得到被测点的位置。一维成像单元中,采用东芝TCD1501D线阵CCD作为图像传感器,和50mm焦距的柱面透镜光心线相互垂直,线阵CCD位于柱面透镜的焦平面上。
如图2,采用7系数直接线性变换(DLT,Direct Linear Transformation)完成相机校准和坐标重建。
研制的基于线阵CCD的实时空间位移测量系统见图3。主要由有源标识、光学系统、采集处理系统、自动标定系统、采集与标定软件组成。线阵CCD测量系统结构框图见图4。
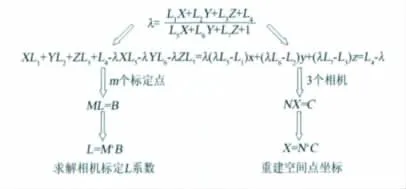
图2 直接线性变换坐标测量过程Fig.2 Measurement process using direct linear transformation

图3 基于线阵CCD的实时空间位移测量系统Fig.3 Real-time spatial displacement measurement system based on linear CCD
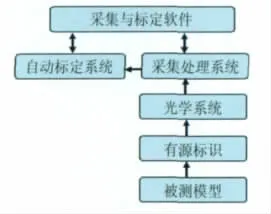
图4 系统结构框图Fig.4 System structure diagram
2 信号处理方法研究
信号处理是技术应用的关键。通过实践研究,提出了一种基于特征边缘提取的组合特征定位WBT算法,对原始信号先进行小波降噪,再使用B样条插值10倍细分,最后取3个阶梯阈值与峰值加权计算,可以有效地提高系统精确度。
2.1 小波变换降噪
Swdldens等人提出了一种完全在时空域构造小波的提升算法(Lifting scheme),5/3提升小波只有一次预测和更新的过程,系数为2的幂次,从追求运算速度和缩小硬件面积的角度看,5/3提升小波更有优势,因此小波变换降噪采用该方法。
提升公式:
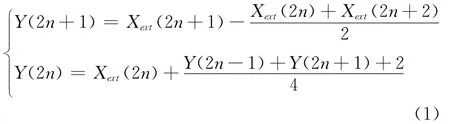
逆变换公式:

其中,X(n)为边界扩展后的输入信号;Y(n)为输出信号。
应用到线阵CCD信号处理中,波形见图5,坐标精度改善结果见表1。
小波降噪后波形进行了一定的平滑处理,虽然在总体来说修正点数不多,但处理之后,对系统精度有明显提高,x轴精确度从0.31mm提高到0.17mm。

表1 小波降噪重建坐标精确度对比Table 1 Accuracy comparison of coordinate reconstruction using wavelet de-noise
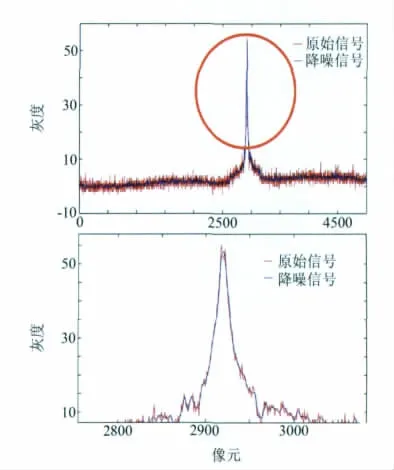
图5 小波降噪波形及局部放大Fig.5 Wavelet de-nolse wavefrom and detail view
2.2 加权阈值峰值定位
对数据深入分析,可知道信号边缘带有更多的信息。峰值也是一种特殊的边缘。单纯计算峰值可能会损失有用的信息。以峰值的0.9,0.8,0.7倍分别作为阶梯阈值,其与波形相截得到的坐标值的1/2,求得一个边缘中心平均值,将该3个值与峰值加权平均,越靠近峰值权值越重。
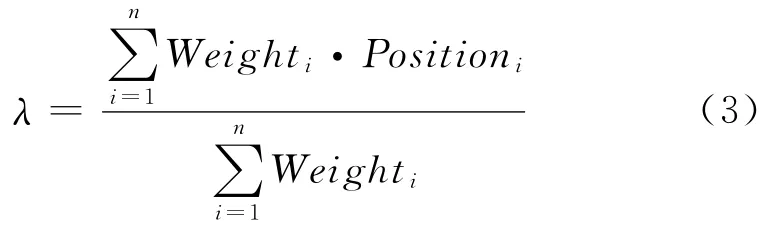
其中,λ为有源标识中心位置;Weighti为第i个阈值的权值;Positioni为第i个阈值截线中心位置;n为阈值的个数,这里取n=4。
计算结果波形见图6,坐标精度改善结果见表2,系统精度有明显改善。
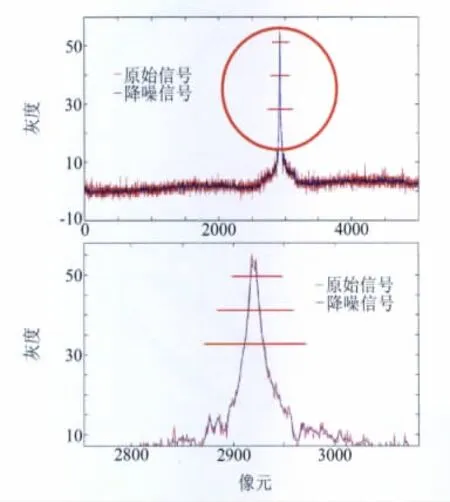
图6 加权阈值峰值定位波形Fig.6 Waveform of weighted threshold and peak positioning

表2 加权阈值峰值定位重建坐标精确度对比Table 2 Accuracy comparison of coordinate reconstruction using weighted threshold and peak positioning
2.3 B样条插值细分
小波降噪后的波形仍然是像素级的,采用加权阈值峰值默认两个像素之间是直线连接。为了得到精度高的亚像素边缘,通过B样条插值对相邻两个像素进行10倍细分,之后再用加权阈值峰值来从边缘值求中心点。

其中,y为对应内节点的坐标值;N为内节点数;ci为控制系数向量(x)为k次B样条基函数。
处理波形见图7,坐标重建精确度对比见表3,可以获得更优化的结果精确度。
图7 B样条插值细分波形Fig.7 B-spline interpolation subdivision waveform

表3 B样条插值细分重建坐标精确度对比Table 3 Accuracy comparison of coordinate reconstruction using B-spline interpolation subdivision
3 光学系统抗震研究
风洞试验现场洞壁、地板等环境振动很强,造成的相机振动对非接触测量结果有较大影响。采用B&K3625激振器模拟风洞振动源,对系统分别施加低频单一频率振动和高频随机振动,对振动影响进行研究。
如图8,在3个线阵CCD相机上分别安装B&K4524-B三轴加速度传感器,在相机测量空间静止点坐标的同时,使用FOCUSII动态信号分析仪采集振动信号。

图8 采集相机振动信号Fig.8 Camera vibration signal acquisition
实验结果如图9,分析试验结果得知,高频随机振动影响了成像质量,使得信号边缘模糊、波形展宽和变形,特征定位难度增加;低频振动对像中心位置影响较大,直接导致坐标重建误差增大。试验表明,采用组合特征定位WBT算法可以有效对抗高频噪声造成的像质模糊、波形展宽和变形,降低了高频随机噪声的影响。

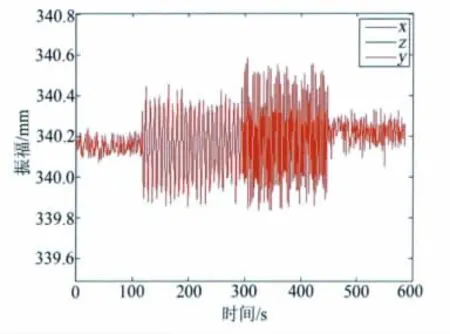
图9 振动模拟试验结果Fig.9 Result of vibration simulation test
采用多周期平均法可以有效提高低频振动时坐标重建的准确性,但对系统的实时性造成一定影响。通过对组合特征定位WBT算法和多周期平均算法的应用,可以使系统的测量精度得到保障。
4 系统应用
由于重大冰雪灾害,致使承担电力运输任务的输电线大量结冰,在覆冰导线空气动力特性和舞动特性的双重作用下,大量输电线扭断,输电塔倒塌,电力系统遭受严重破坏。本研究应用线阵CCD系统测量覆冰输电导线风洞试验中的舞动轨迹。
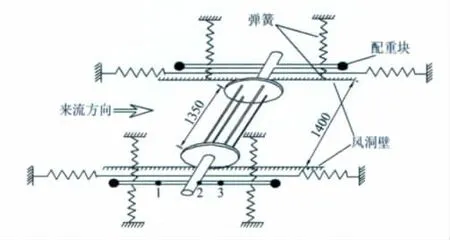
图10 导线舞动试验装置示意图Fig.10 Schematic of conductor galloping locus test device
利用线阵CCD测量系统在1.4m×1.4m风洞测量某型覆冰导线在不同的风速、不同截面形状的覆冰和不同的迎角下的导线群舞动轨迹测量试验。试验装置如图10,试验内容见表4,采集频率为80Hz,结果数据见图11~12,通过试验完成了新月形和扇形覆冰导线舞动规律研究[5]。
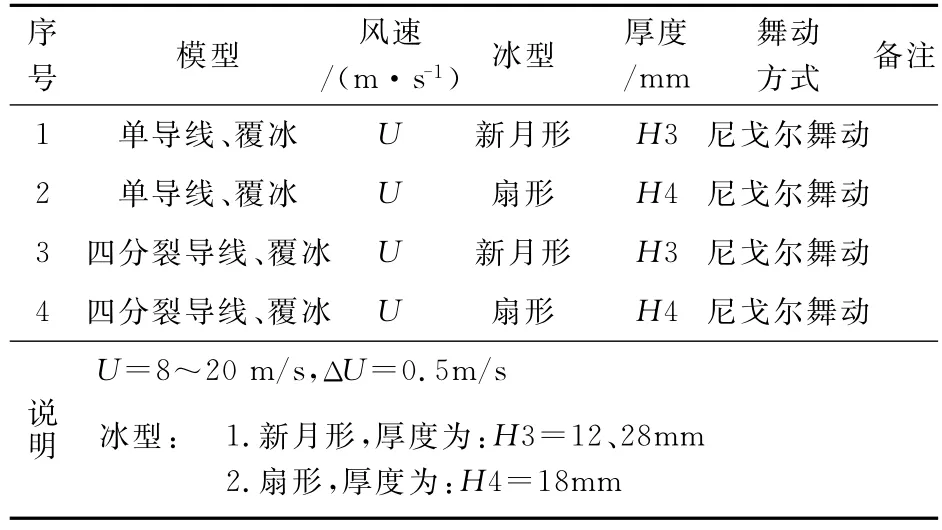
表4 舞动试验内容Table 4 Coment of conductor galloping locus test
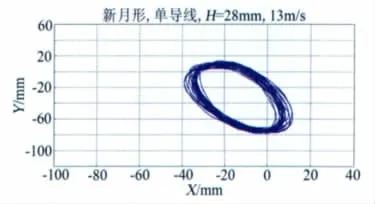
图11 某型覆冰单导线风洞试验轨迹Fig.11 Locus of single-iced-conductor in wind tunnel
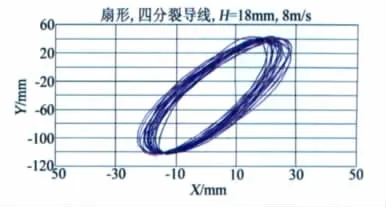
图12 某型覆冰分裂导线风洞试验轨迹Fig.12 Locus of bundle-iced-conductor in wind tunnel
5 结 论
(a)利用线阵CCD对低速风洞模型运动轨迹进行测量,具有实时性好、精度高、灵活方便、性价比高的特点,X、Y轴测量精确度可达到0.14mm,Z轴测量精确度可达到0.60mm;
(b)基于边缘特征提取的组合特征定位 WBT算法,包括小波变换、B样条插值和加权阈值峰值等复合处理技术,较好的抑制了图像噪声和外部高频振动的影响,实现了高精度的亚像素细分定位,定位精度提高54%;
(c)新月形和扇形覆冰单导线发生舞动时运动轨迹均是椭圆形,舞动达到稳定态时,水平位移和竖向位移随时间基本不变。导线舞动时最大双边振幅可达140mm,是导线直径的5倍以上。随着风速的增加,舞动轨迹振幅增大,风速增大到一定程度后舞动将失稳;新月形冰型导线舞动振幅随风速的变化相对明显一些。冰型厚度越大,舞动起始风速越低。参考文献:
[1] 周述光,温渝昌,金启刚.风洞模型位移光学测量技术应用综述[J].实验流体力学,2009,23(2):94-99.
[2] 吴剑,王广志,丁海曙,等.三维测量系统中线性CCD相机的直接线性变换[J].清华大学学报(自然科学版),2004,44(6):860-863.
[3] 艾莉莉,袁峰,丁振良.应用线阵CCD的空间目标外姿态测量系统[J].光学精密工程,2008,16(1):161-165.
[4] 李晶,袁峰,丁振良.基于BP神经网络的外姿态测量系统线阵CCD标定[J].仪器仪表学报,2010,31(5):1138-1141.
[5] 王丹,黄汉杰.覆冰导线模型1.4米×1.4米风洞试验报告[R].CARDC报告,2009.
