无源高阶终端滑模控制双馈风力发电系统
2012-02-10郑雪梅李晓磊任毅何金梅李秋明
郑雪梅, 李晓磊, 任毅, 何金梅, 李秋明
(哈尔滨工业大学电气工程与自动化学院,黑龙江哈尔滨 150001)
无源高阶终端滑模控制双馈风力发电系统
郑雪梅, 李晓磊, 任毅, 何金梅, 李秋明
(哈尔滨工业大学电气工程与自动化学院,黑龙江哈尔滨 150001)
为了简化双馈风力发电系统模型并且使得系统具有抗干扰的特性,依据无源性理论和滑模控制理论从能量和鲁棒性的角度研究了变速恒频双馈风力发电系统。首先建立了基于Euler-Lagrange(EL)方程的双馈风电系统数学模型,使得双馈风电系统分解为电气和机械两个无源子系统的反馈互联。在设计控制器时只需考虑电气子系统,而机械子系统是一个能量耗散系统,通过选择适合的参数可以保证稳定,因此简化了控制算法。针对速度环响应速度慢,鲁棒性差的问题设计了高阶非奇异滑模速度控制器。仿真结果表明了所提控制算法简单有效,能够保证风力发电系统输出恒定频率的同时,电机转速也能快速的跟踪参考转速,提高了整个系统的动静态性能。
双馈风力发电机;鲁棒性;无源性控制;滑模变结构控制;欧拉方程
0 引言
随着石油、天然气、煤炭等传统化石燃料的枯竭及其燃烧对环境造成的严重污染,作为可再生绿色能源的风能的开发利用具有十分重要的意义。目前各种风力发电技术的发展方兴未艾,而其中采用双馈感应发电机(doubly-fed induction generator,DFIG)实现变速恒频(variable speed and constant frequency,VSCF)控制的发电方式,以其优良的性能得到广泛的应用[1-5]。DFIG是一个典型的非线性、多变量、强耦合系统,传统的矢量控制方法具有依赖系统参数的不足,且在负载变化时容易产生电流畸变,风速变化的不确定性甚至会导致系统的不稳定。目前,新出现的无源性控制(passivity - based control,PBC)方法[6-9],展现了优越的控制性能。它以全局稳定为控制目标,以无源系统的能量平衡为设计准则,找出不影响系统稳定的“无功力”,迫使系统总能量跟踪期望的能量函数,并使系统的状态变量渐近收敛至设定值[10]。由于这种方法只注重系统的物理特征所体现出来的自然属性,不依赖于对象模型精确线性化的设计方法,能有效地简化控制器的设计,提高系统的鲁棒性。文章[10]从α-β坐标系对变速恒频双馈风力发电系统进行了分析,取得了较好的控制效果,但是在实际应用中需要大量的旋转变换,用数字控制器实现起来复杂;文章[11]采用d-q坐标系对风力发电系统进行了深入的分析,设计了自适应控制器,实现了对时变风速的跟踪,然而由于外环采用PI控制器鲁棒性不佳,容易受到干扰。
本文从DFIG的数学模型入手,将DFIG的无源性控制方法与高阶非奇异终端滑模控制相结合,并应用于双馈风力发电系统中。首先,建立双馈变速恒频风力发电系统无源性模型及其描述方法,然后,通过在无源性控制方法中引入高阶滑模控制器,有效提高系统的鲁棒性,解决其它控制方法中普遍存在的发散奇点等问题和PI控制环节易受外部干扰的问题,最后,通过仿真实验研究,验证了所设计控制器的有效性。
1 DFIG的无源性
在两相同步旋转坐标系下,DFIG的电气和机械子系统可分别由一个四阶电气微分方程和一个一阶机械微分方程[11]表示为
式中:usd、usq为定子 d -q 轴电压,urd、urq为转子 d -q轴电压;isd、isq为定子 d-q轴电流;ird、irq为转子 d-q轴电流;Rs、Rr为定转子电阻;Ls、Lr为定转子电感;Lm为定转子之间的互感;p为微分算子;J为转动惯量;k为阻尼系数;np为电机的极对数;Te、TL为电磁转矩和负载转矩;ω1为定子同步电角速度;ωm表示转子机械角速度;ωs=ω1-ωm表示转差电角速度;B为阻尼系数。
为了得到DFIG的无源性模型,将式(1)改写成EL 形式[12]为
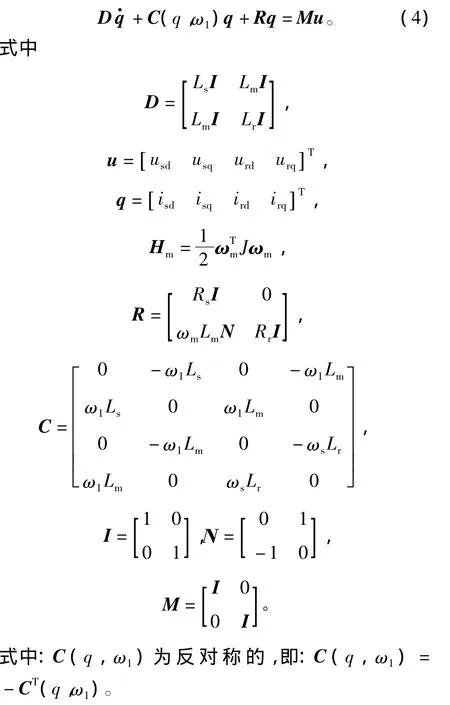
在忽略绕组的电容效应的前提下,可以定义电机的电气子系统的能量函数为

将上式对时间求导可得
由于C具有反对称性,则“qTCq”项对系统的能量变化不起作用,也就不影响系统的稳定性。因此,在电机的控制中就不需要抵消这一部分非线性因素。这一过程可以认为是配置系统无功分量。
将方程(7)两边积分可得
上式左边是电气子系统能量的增量,右边是电源供给电机的能量。若将[usdusqurdurq]T作为电气子系统的输入,[isdisqirdirq]T作为电气子系统的输出,则映射u|→i为输出严格无源,即DFIG的电气子系统是严格无源的。
假设电机轴是刚性的,即电机的机械部分存储能量只有动能,则其能量函数为

将其求导后代入式(2),对方程两边积分得t
上式左边是机械子系统能量增量,右边是机械子系统输入能量。若将(Te-TL)作为机械子系统的输入,ωm作为机械子系统的输出,则映射(Te-TL)|→ωm为输出严格无源,即DFIG的机械子系统是严格无源的。
DFIG可表示为电气和机械无源子系统的反馈互联。根据无源性原理[12],整个DFIG系统可认为是严格无源的,如图1所示。
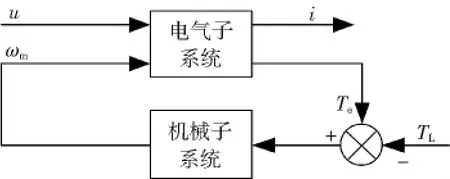
图1 DFIG系统分解Fig.1 Decomposition of DFIG system
通过分解,可把机械子系统作为电气子系统的一个无源干扰项,只把电气子系统作为被控系统处理,从而简化了控制器的设计。
2 控制器设计
2.1 转矩控制器设计

为实现定子磁链渐近矢量控制和电磁转矩渐近跟踪,控制目标制定为:
1)电磁转矩渐近跟踪,
2)定子磁链渐近定向,


为此,定义实际状态与状态参考值之间的跟踪误差为e=q-q*,由方程(4)得系统的误差方程为

其中ξ为扰动量,形式为

若选择Lyapunov函数Hd=1/2eTDe,其导数
由磁链渐近矢量控制的控制目标可得
3)定子磁链幅值渐近跟踪,
设期望的ψs为常数值,若要控制DFIG定子侧无功功率为零,取=0。由式(11),式(15)可以得到

为了保证整个控制系统严格无源,改善系统动态响应,并降低控制系统对参数变化的灵敏度,在方程(17)中增加了阻尼项。式中:k1,k2为阻尼系数。通过适当调节k1,k2可使定子磁链、电磁转矩实际值快速跟随参考值,实现负载转矩时变未知情形下控制系统期望的动、静态性能。
2.2 转速控制器设计
由于无源性控制器可以渐近的跟踪时变的转矩,转速控制器的目标是精确跟踪给定的转速信号,对外界负载扰动以及摩擦阻力等参数摄动具有完全鲁棒性,输出平滑的转矩给定信号T*e。由于传统的控制策略如PID,很难满足高精度的要求,本文采用二阶终端非奇异滑模控制策略实现外环的转速控制。令速度给定信号为ω*,假设ω*足够平滑,即处处具有二阶连续导数,定义误差状态:e=ω*-ω,根据式(2),得

可得转速误差系统状态方程为

本文设计如下2阶非奇异滑模超曲面
定理 对于转速误差系统(19),如果选取二阶滑模面(20),面(21),并设计如下控制律,则系统是渐进稳定的。
式中,等效控制分量为
证明 选取Lyapunov函数为

整个控制系统结构图如图2所示。
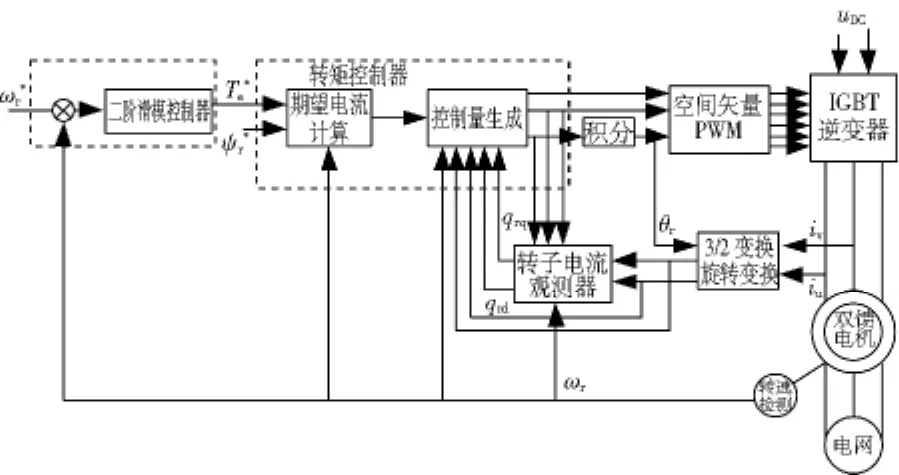
图2 基于无源和高阶滑模控制的DFIG控制系统Fig.2 The block diagram of DFIG control system based on the passivity and higher-order SMC
3 仿真研究
为了效验所设计控制器的有效性,采用Matlab/SIMULINK进行仿真,系统参数如下:双馈发电np=3,Rs=0.314 Ω,Rr=0.379 Ω,Ls=0.0 449 H,Lr=0.0 438 H,Lm=0.0 427 H,J=0.39 kg·m2。取 k1=k2=300,k3=1,k4=5,ρ=25,p=5,q=3,为了验证所设计DFIG控制系统无源方法的动静态性能,起始转速设定为636 r/min,进入稳态之后,在t=5 s时转速突增至同步速1 000 r/min,并对PI调节和滑模调节过程进行对比,实验结果如图3~图9所示。

图3 转子电压波形Fig.3 Rotor voltage waveform

图4 转子电压波形局部放大图Fig.4 Partially enlarged of the rotor voltage waveform
图3为DFIG转子电压波形,转子电流的频率随机组的转速的变化而变化。图3(a),图3(b)分别为PI控制下和滑模控制下的转子电压波形。由图可见当DFIG低于同步速时转子输入交流电流,而当DFIG转速变化至同步速时,转子电流频率为零。而且在滑模控制下系统的收敛速度明显的加快。图4为转子电流在5 s转速突变时波形的局部放大图。从图中可以看出二阶滑模控制比PI控制相比具有更高的鲁棒性和快速性。图5为定子电压波形,可以看出在整个过程中定子电压频率恒定基本保持不变。图6是定子电压在5 s转速突变时波形的局部放大图,通过对比可以看出二阶滑模控制在转速突变时具有更高的鲁棒性。图7为转子转速波形。可以看出虽然滑模控制具有较高的快速性,但是在初始阶段具有较大的波动,因此在实际应用中应加限幅环节来避免对电机造成损坏。
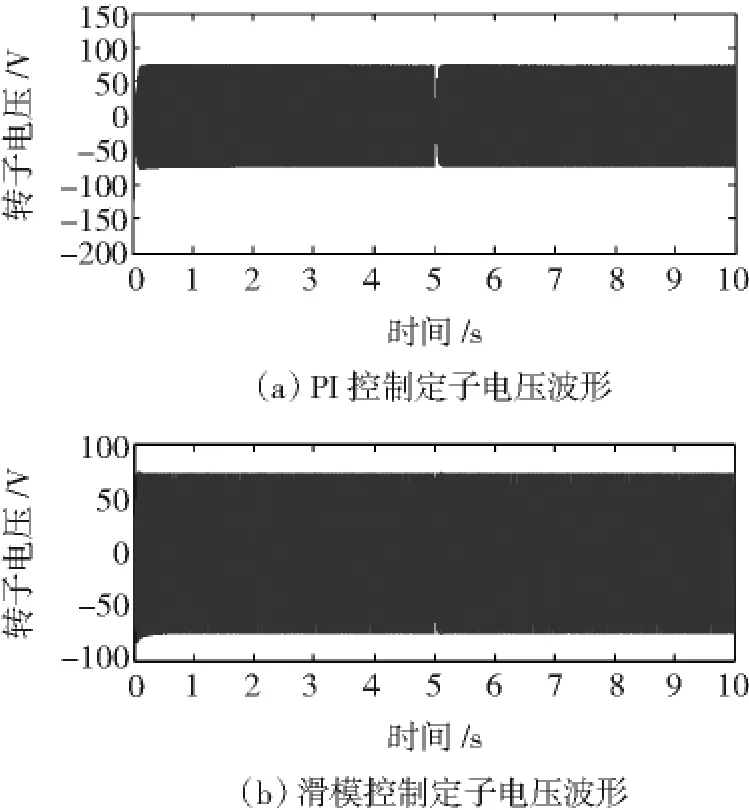
图5 定子电压波形Fig.5 Stator voltage waveform
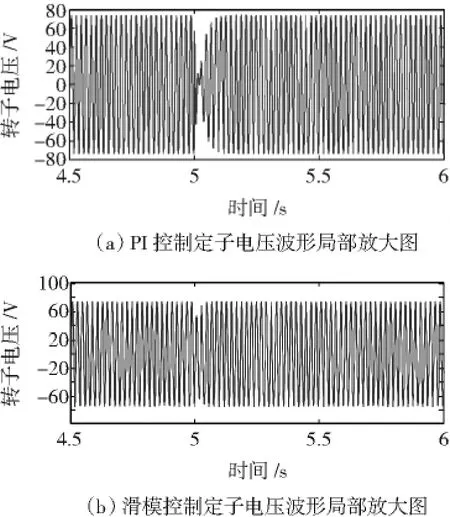
图6 定子电压波形局部放大图Fig.6 Partially enlarged of the stator voltage
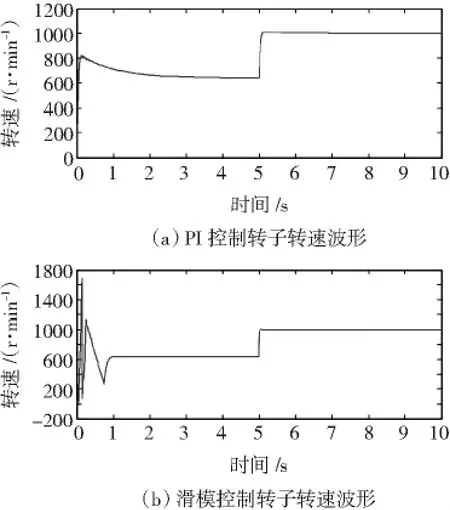
图7 转子转速波形Fig.7 Rotor speed waveform
4 结语
变速恒频双馈风力发电系统采用无源性控制方案可保证系统具有全局稳定性,本文将无源性和二阶非奇异终端滑模相结合推导出用于控制DFIG的控制策略,与传统的控制方法相比较,该控制方法具有算法简单,良好的响应速度和鲁棒性强等诸多优点。仿真结果表明在风速不断变化的情况下,该控制方法与传统的PI控制方法相比的有效性。研究结果为变速恒频双馈发电系统的控制提供了有价值的参考。
[1] HE Yikang,ZHENG Kang,PAN Zaiplng,et al.Investigation on an AC excited variable-speed constant-frequency wind power generation system[J].Automation of Electric Power Systems,2004,28(13):55-59.
[2] 郑雪梅,李琳,徐殿国.双馈风力发电系统低电压过渡的高阶滑模控制仿真研究[J].中国电机工程学报,2009,29:178-182.
ZHENG Xuemei,LI Lin,XU Dianguo.Simulation study on higher-order sliding mode control of DFIG wind energy system under low voltage ride through[J].Proceedings of the CSEE,2009,29:178-182.
[3] 徐殿国,王伟,陈宁.基于撬棒保护的双馈电机风电场低电压穿越动态特性分析[J].中国电机工程学报,2010,30(22):29-36.
XU Dianguo,WANG Wei,CHEN Ning.Dynamic characteristic analysis of doubly-fed induction generator low voltage ridethrough based on crowbar protection[J].Proceedings of the CSEE,2010,30(22):29-36.
[4] 张学广,徐殿国,李伟伟.双馈风力发电机无速度传感器控制[J].太阳能学报,2009,30(10):1234 -1239.
ZHANG Xueguang,XU Dianguo,LI Weiwei.Research on speed sensorless control of doubly fed wind power generator[J].Acta Energiae Solaris Sinica,2009,30(10):1234-1239.
[5] 蔚兰,陈国呈,曹大鹏,等.电网对称故障时双馈感应发电机低电压穿越控制[J].电机与控制学报,2010,14(7):1 -6.
WEI Lan,CHEN Guocheng,CAO Dapeng,WU Guoxiang.Low voltage ride-through control of doubly fed induction generator during symmetric voltage sag [J].Electric Machines and Control,2010,14(7):1-6.
[6] CECATI C,ROTONDALE N.Torque and speed regulation of induction motors using the passivity theory approach[J].IEEE Trans.on Industrial Electronics.1999,46(1):119 -127.
[7] 荀尚峰,李铁才,周兆勇.飞轮储能系统放电单元无源化控制方法研究[J].电机与控制学报,2010,14(7):7-12.
XUN Shangfeng,LI Tiecai,ZHOU Zhaoyong.Study on passivity control method for flywheel energy storage system discharging unit[J].Electric Machines and Control,2010,14(7):7 -12.
[8] 王孝洪,吴捷,杨金明,等.矩阵式变换器电流环无源性控制[J].控制理论与应用,2008,25(2):341 -347.
WANG Xiaohong,WU Jie,YANG Jinming,et al.Passivity control for current-loop of matrix converter[J].Control Theory & Applications,2008,25(2):341 -347.
[9] 陈峰,徐文立.基于无源性的异步电动机转速控制[J].清华大学学报:自然科学版,1999,39(7):29 -32.
GHEN Feng,XU Wenli.Passivity based speed control of induction motors[J].Journal of Tsinghua University:Science and Technology,1999,39(7):29-32.
[10] 高勇,张文娟,杨媛,等.基于无源性的变速恒频双馈风力发电机控制系统[J].电工技术学报,2010,25(7):130 -136.
GAO Yong,ZHANG Wenjuan,YANG Yuan,et al.Passivitybased control system for VSCF doubly fed wind power generator[J].Transactions of China Electrotechnical Society,2010,25(7):130-136.
[11] 钱平,葛翔.双馈感应风力发电机的无源性控制方法研究[J].太阳能学报,2009,30(11):1540 -1545.
QIAN Ping,GE Xiang.Study on passivity-based control strategies of doubly fed induction wind power generator[J].Acta Energiae Solaris Sinica,2009,30(11):1540-1545.
[12] ORTEGA R,VAN DER SHAFT A J,MAREELS I,et al.Putting energy back in control[J].IEEE Control Systems Magazine,2001,21(2):18-33.
(编辑:刘琳琳)
Passivity and higher-order sliding mode control for doubly-fed induction generator wind power system
ZHENG Xue-mei, LI Xiao-lei, REN Yi, HE Jin-mei, LI Qiu-ming
(School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin 150001,China)
In order to simplify the model of doubly-fed induction generator(DFIG)and improve the robustness,variable speed and constant frequency(VSCF)DFIG wind power generation systems from the perspective of energy and robustness based on passivity and sliding mode control(SMC)theory were studied.Firstly,the model of DFIG based on Euler-Lagrange(EL)equations was established,so the original DFIG wind turbine system is divided into electrical and mechanical subsystem.For two subsystems,the electrical subsystem was designed;while the mechanical subsystem is a energy-consuming system and stable through selecting the suitable design parameters,so the system control algorithm is simplified.A high-order terminal SMC to get a faster speed and the better robustness for the speed loop was designed.Simulation results show that the proposed controller is simple and effective,and it not merely can guarantee the wind power system output constant frequency and the motor speed can also track the reference speed quickly,so the static and dynamic performance of the whole wind turbine system is improved.
doubly-fed induction generators;robustness;passivity based control;sliding mode control;Euler-Lagrange equation
TP 273
A
1007-449X(2012)08-0081-07
2011-10-11
国家自然科学基金(51077017);黑龙江省自然科学基金(E200918)
郑雪梅(1969—),女,副教授,硕士生导师,研究方向为变结构控制、鲁棒控制、风力发电;
李晓磊(1989—),男,硕士研究生,研究方向为电力电子技术的应用、非线性控制;
任 毅(1988—),女,硕士研究生,研究方向为电力电子技术的应用、非线性控制;
何金梅(1987—),女,硕士研究生,研究方向为电力电子技术的应用、非线性控制;
李秋明(1970—),男,副教授,硕士生导师,研究方向为电力电子方向。
郑雪梅