2RPU-2SPS全柔顺并联机构构型设计及刚度的研究
2012-01-09朱大昌李培崔祥府严智敏
朱大昌,李培,崔祥府,严智敏
(江西理工大学机电工程学院,江西赣州341000)
2RPU-2SPS全柔顺并联机构构型设计及刚度的研究
朱大昌,李培,崔祥府,严智敏
(江西理工大学机电工程学院,江西赣州341000)
2RPU-2SPS型并联机构由RPU支链和SPS支链组成的非对称结构,具有2转动2平移运动特性的并联机构.文中基于2RPU-2SPS并联机构的运动特性,采用替换法设计出与之对应的柔性并联机构.应用ANSYS软件建立2RPU-2SPS型柔性并联机构、全柔顺并联机构的支链模型,并对全柔顺并联机构的支链进行拓扑优化,进而设计出具有全柔顺特性的新型的2RPU-2SPS型空间全柔顺并联机构.实验仿真对比结果表明:全柔顺支链在整体刚度性能方面优于柔性并联机构支链,该设计方法为全柔顺并联机构整体设计提供了理论依据.
柔性并联机构;全柔顺并联机构;运动特性;支链刚度;建模仿真
0 引言
并联机构由于刚度大、精度高、承载能力强、操作速度高等优点,得到迅猛的发展和广泛的应用.但是,传统的并联机构由于其运动支链是由刚性连杆以运动副连接而成,这在高速、高精度、微型化等要求下不可避免的会暴露出其固有缺陷,比如自身惯性所带来的振动,运动副与刚性连杆联接所产生的间隙、摩擦、润滑、装配、误差等.柔顺机构的出现为这些问题的解决提供了一种新的方法.柔顺机构主要依靠机构中柔性构件的自身变形来实现机构的运动、力和能量的传递和转换,从而实现机构全部的运动和功能.因此,柔顺机构大大减少了或是消除了上述问题.目前,国内外的许多学者将柔性机构相关理论与并联机构理论相结合,对空间柔顺并联机构进行了深入的研究.Jae-Jong Lee等的6自由度自适应定位工作台[1]和5-DOF自适应承片台[2].王华等[3]设计出一种整体式空间三自由度柔顺并联微动平台.荣伟彬等[4]提出了一种由压电陶瓷驱动的具有3-PPSR结构的六自由度柔顺并联机构.目前对空间柔顺并联机构的大部分研究都只是将并联机构各运动支链的运动副以柔性铰链代替,再用柔性连杆将各个柔性铰链连接在一起形成相对应的柔性支链,从而构成柔顺并联机构.如杨启志等[5]所设计的一种非对称全柔性3-RRRP平移微动并联机构,通过这种方法设计的柔顺并联机构将并联机构与柔顺机构理论相结合,可实现所要求的运动与功能,但在超精密定位等要求高精度的应用上,还存在些许不足.因此,设计出一种具有更高刚度的柔顺并联机构类型,就显得很有必要.
文中对2RPU-2SPS并联机构的运动特性进行了分析.同时根据2RPU-2SPS[6]并联机构,利用替换法设计出2RPU-2SPS柔性并联机构,并在此基础上设计出2RPU-2SPS全柔顺并联机构.利用ANSYS软件分析柔性机构和全柔顺机构的支链.同时,使用ANSYS软件的拓扑优化功能,使得所设计的全柔顺并联机构的支链的结构更加合理.通过优化分析对比,得出所设计的全柔顺支链在刚度上有所提高,为超精密定位平台的精度研究提供帮助.
1 结构简介
2RPU-2SPS是非对称的4自由度并联机构.它是由2条RPU支链和2条SPS支链构成的(如图1所示),并且相同的支链相邻的组装在基座上.RPS支链由转动副(R)、移动副(P)和虎克较(U)组成,且具有wR⊥vP⊥wvU的几何关系,其中U副是由两个转动副(即wR和vR)组成.SPS支链由两个球副(S)和移动副(P)组成.S是由3个R副(即wR,vR,wR)组成.

图1 2RPU-2SPS并联机构
2 运动特性分析
在分析并联机器人机构[7-8]中,螺旋S是一个非常有效的工具.螺旋的基本形式可以表示为:[S S0]T,S为沿螺旋轴线方向的单位矢量,S0为对偶数.当螺旋S 的两矢量表示为标量时,可用plcu咬ker坐标(l,m,n,o,p,q)来表示.如果有两个螺旋若它们满足下述条为反螺旋,式中“·”表示互易积.从物理意义上讲,互易积为零的两个螺旋,一个可用来表示物体的运动,另一个则表示物体的受力.0节距的力螺旋描述的是力,无穷大节距的力螺旋则为力偶.
在动平台上建立基础坐标B-XYZ如图2所示,X轴和Y轴在动平台内,Z轴垂直于动平台.在定平台上建立支链RPU的坐标系B1-x1y1z1,其中z1垂直于定平台,x1轴与转动副R的轴线平行.同时建立支链SPS的坐标系B2-x2y2z2,它的x、y和z轴分别和基座上的组成S副的3个R副的轴线同轴,即x轴与R1同轴,y轴与R2同轴,z轴与R3同轴.
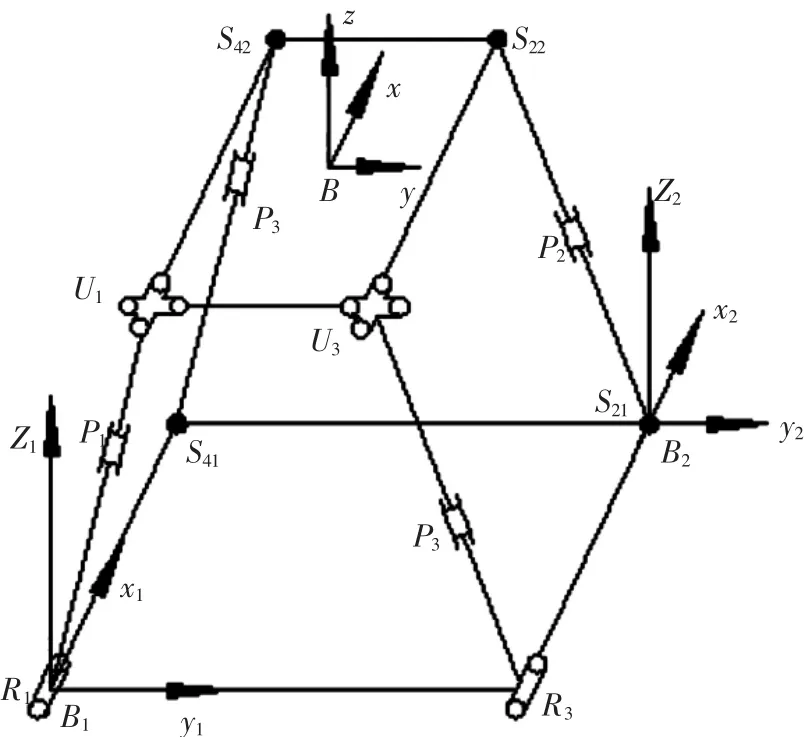
图2 2RPU-2SPS并联机构结构简图
在RPU支链上,U是由两个R副组成,所以支链的运动螺旋系为:

该支链的末端杆有4个自由度,并受到两个约束.对应这两个约束的反螺旋可以由螺旋的互易积为零求得,其运动反螺旋为:

由分析得出,该支链提供一个约束力偶和一个约束力,约束了支链的一个绕y轴转动和一个沿x轴移动的自由度.由于机构具有两个相同的RPU支链,所以均对动平台提供一个约束力偶和一个约束力,并且,所有的约束力偶相互平行和力线矢共轴.
在SPS支链上,S由3个R副组成,所以该支链的运动螺旋系为:
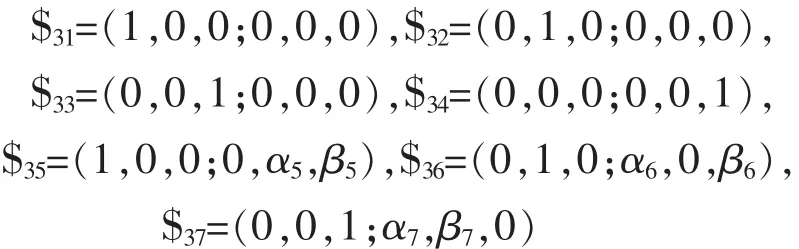
其运动的反螺旋为:

从SPS支链的反螺旋系可以看出,支链SPS对动平台不提供约束,为无约束支链,只起到支撑作用.因机构具有两条相同的SPS支链,它们对动平台均不提供约束.
综上所述,在4条支链中,只有两条RPU对动平台提供2个约束,限制了动平台绕Y轴的转动和沿X轴的移动.故2RPU-2SPS具有4个自由度[9],即绕X、Z轴转动和沿Y、Z轴的移动.
32 RPU-2SPS柔性并联机构的设计及支链刚度分析
3.1 柔性并联机构设计的原则
并联机构转化为柔性并联机构的原则:
(1)组成柔性并联机构的各个柔性支链的相对位置并联机构的相对位置一致;
(2)各柔性并联机构支链上的运动副与相应的并联机构的运动副相对应;
(3)柔性并联机构上的各柔性运动副的位置设计满足并联机构所要求的几何条件.
3.22 RPU-2SPS柔性并联机构的设计
文中采用替换法在2RPU-2SPS并联机构的基础上设计了2RPU-2SPS柔性并联机构.满足并联机构转化柔顺并联机构设计的原则.首先设计相应的RPU和SPS型柔性支链,然后相同的支链相邻的固定在定平台上,即成了2RPU-2SPS型柔性并联机构平台,如图3所示.
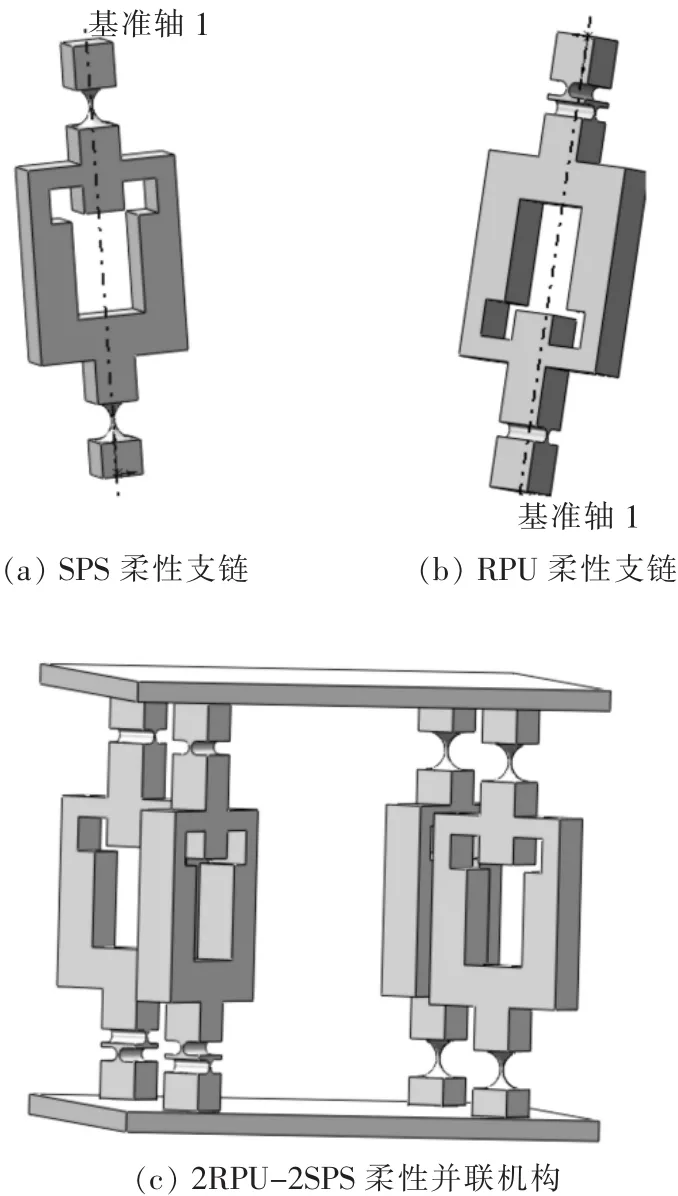
图32 RPU-2SPS支链及柔性并联机构
42 RPU-2SPS全柔顺并联机构的设计
根据柔性并联机构设计全柔顺并联机构时,应注意以下两点:①主要几何尺寸设定一致,便于比较刚度;②设定相同的约束及载荷.
在2RPU-2SPS型柔顺并联机构的基础上设计与之相对应的2RPU-2SPS型全柔顺并联机构.首先设计相应的RPU和SPS型全柔顺支链.全柔顺支链是在选定合适的一整块材料上通过先进切割技术分别切割出各个相应的柔性铰链和柔性连杆,如图4所示,在选定材料上通过先进切割技术按要求切割出一个柔性虎克铰U、一个柔性移动副P、一个柔性转动副R,从而形成RPU型全柔顺支链,如图4(a)所示.SPS型柔性支链是在选定材料上按要求切割出两个柔性球副S和一个柔性移动副P,如图4(b).按照2RPU-2SPS柔性并联机构的安装的几何特点安装2RPU-2SPS型全柔顺并联机构[10],如图4(c).
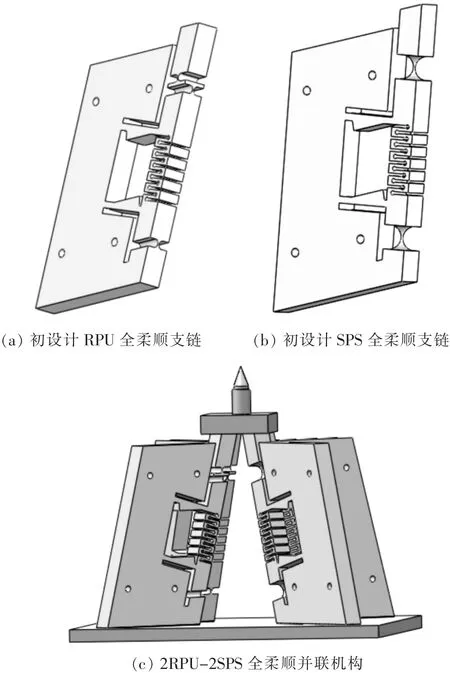
图42 RPU-2SPS全柔顺并联机构
5 2RPU-2SPS型柔性并联机构和全柔顺并联机构的刚度分析
5.1 RPU柔性支链和RPU型全柔顺支链的刚度分析及对比
5.1.1 RPU柔性支链的刚度分析
应用ANSYS软件从SOLIDWORKS中导入RPU型柔性并联机构支链模型,定义机构材料属性和单元类型,进行网格划分.将支链上的一个支点设定自由度为0,并在支链上施加驱动力和外加载荷为1000 N.
对机构的ANSYS模型进行计算和后处理,得到机构支链总位移变形图如图5所示.

图5 RPU柔性支链的总位移变形图
选取支链输出平面上的若干关键节点,在外力作用下这些节点的位移变形如图6.
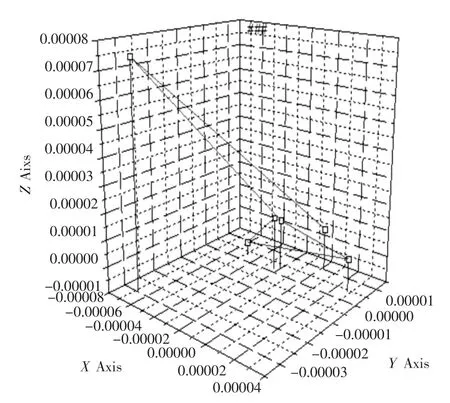
图6 输出平面结点位移变形
对图6中的UX、UY、UZ分别求平均值,可得到位移:
5.1.2 RPU柔性支链的刚度计算
RPU型柔性支链的静刚度模型表示为:

式(1)中:FW—终端外载荷的驱动力;
KS—支链的静刚度矩阵,其包括机构传动刚度和柔性铰链刚度;
ΔP—终端位移变形.使:

将RPU柔性并联机构的支链仿真过程中的数值及结果代入式(3)中,由式(1)可计算出,RPU柔性并联机构支链的静刚度矩阵为:

5.1.3 RPU全柔顺支链的拓扑优化
应用ANSYS软件[11]从SOLIDWORKS中导入RPU型柔性并联机构支链模型,定义机构材料属性和单元类型,进行网格划分[12].将支链上的一个支点设定自由度为0,并在支链上施加驱动力[13]和外加载荷为1000 N.减少面积的80%,削减后的伪密度的范围在0.1~1之间,同时进行10次累加迭代.变形后的图形如图7所示.
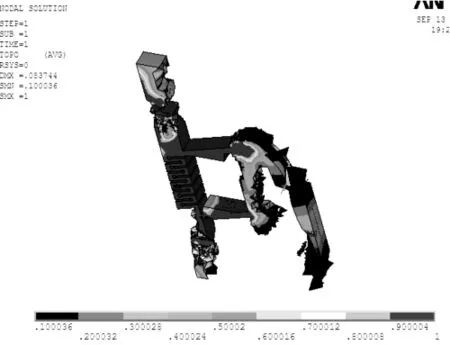
图7 RPU支链拓扑优化后的全柔顺支链
5.1.4 RPU全柔顺支链的刚度分析
在同等条件下对机构的ANSYS模型进行计算和后处理,得到机构支链应变变形图如图8所示.

图8 RPU全柔顺支链的应变变形图
选取支链输出平面上的若干关键节点,在外力作用下这些节点的位移变形如9所示.

图9 输出平面结点位移变形
对上图中的UX、UY、UZ分别求平均值,可得到:

由式(1)、式(2)和式(3)得出,RPU全柔顺支链的静刚度为:

5.2 SPS型柔性支链和SPS型全柔顺支链的刚度分析及对比
5.2.1 SPS柔性支链的刚度分析
该支链应用ANSYS软件分析刚度的设置与RPU型柔性支链的刚度分析设置完全相同.对机构的ANSYS模型进行计算和后处理,得到机构支链总位移变形图如图10所示.

图10 SPS柔性支链的总位移变形图
选取支链输出平面上的若干关键节点,在外力作用下这些节点的位移变形如图11所示.
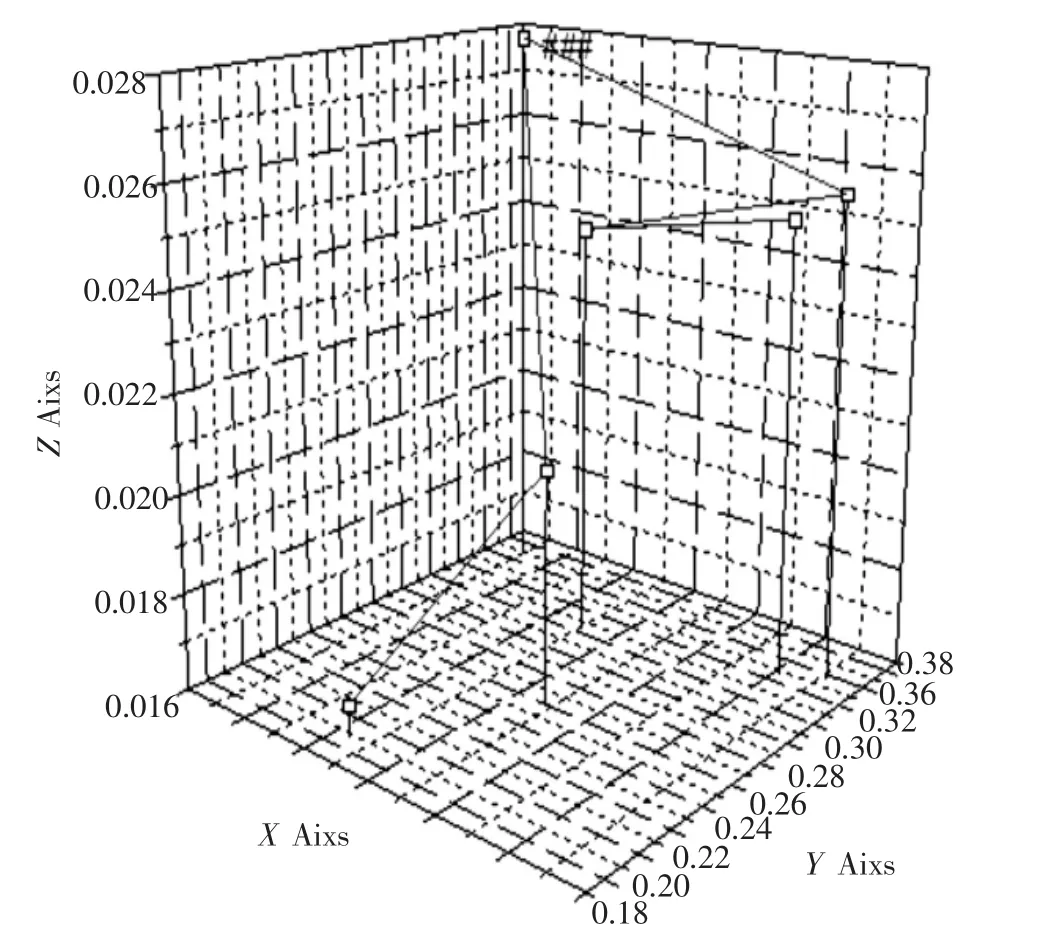
图11 输出平面结点位移变形
对上图中的UX、UY、UZ分别求平均值,可得到:

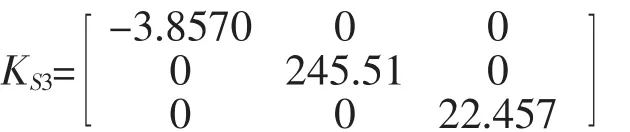
由式(1)、式(2)和式(3)得出,SPS柔性支链的静刚度为:
5.2.2 SPS全柔顺支链的拓扑优化
该支链的所有的优化设置与RPU全柔顺支链的设置相同.优化后的图形如图12所示.
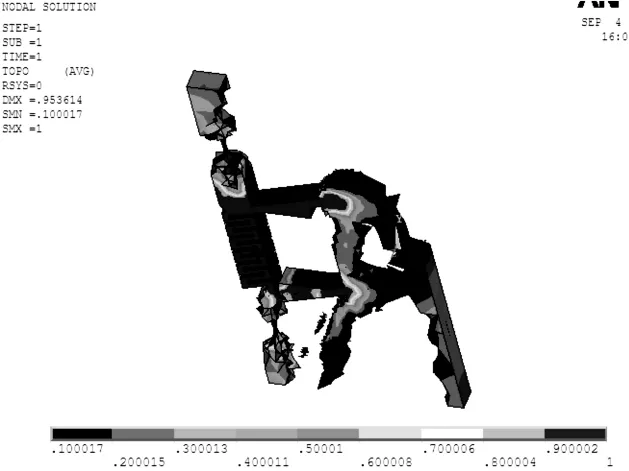
图12 SPS支链拓扑优化后的全柔顺支链
5.2.3 SPS全柔顺支链的刚度分析
在同等条件下对机构的ANSYS模型进行计算和后处理,得到机构支链应力变形图如图13所示.
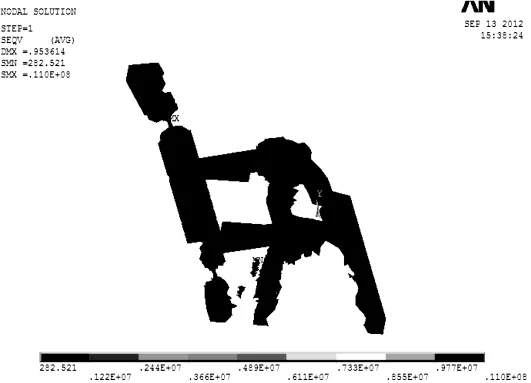
图13 SPS全柔顺支链的应力变形图
选取支链输出平面上的若干关键节点,在外力作用下这些节点的位移变形如图14所示.对上图中的UX、UY、UZ分别求平均值,可得到位移

由式(1)、(2)和(3)得出,SPS全柔顺支链的静刚度为:

5.3 对比分析结论
根据刚度KS1和KS2的数据,可以得到对比图如图15(a)和(b).
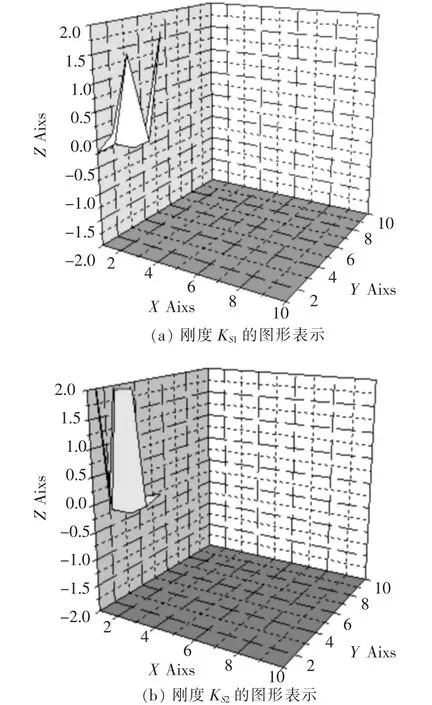
图15 刚度KS1和KS2的对比图
由图15可以看出KS2在X轴、Y轴、Z轴的数值均大于KS1的,得出RPU型全柔顺支链的刚度大于RPU型柔性支链的刚度.从而证明全柔顺支链的设计方法在刚度方面更优,并且此种设计方法的可行性.
SPS柔性支链的刚度KS3和SPS全柔顺支链的刚度KS4的刚度对比图如图16(a)和(b)所示.
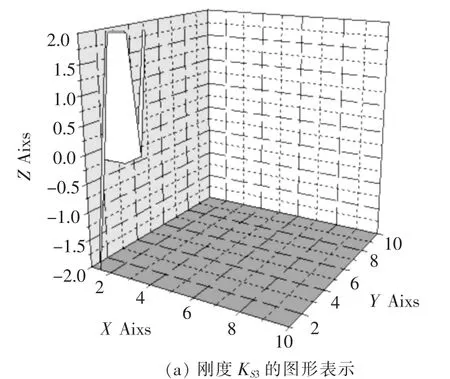
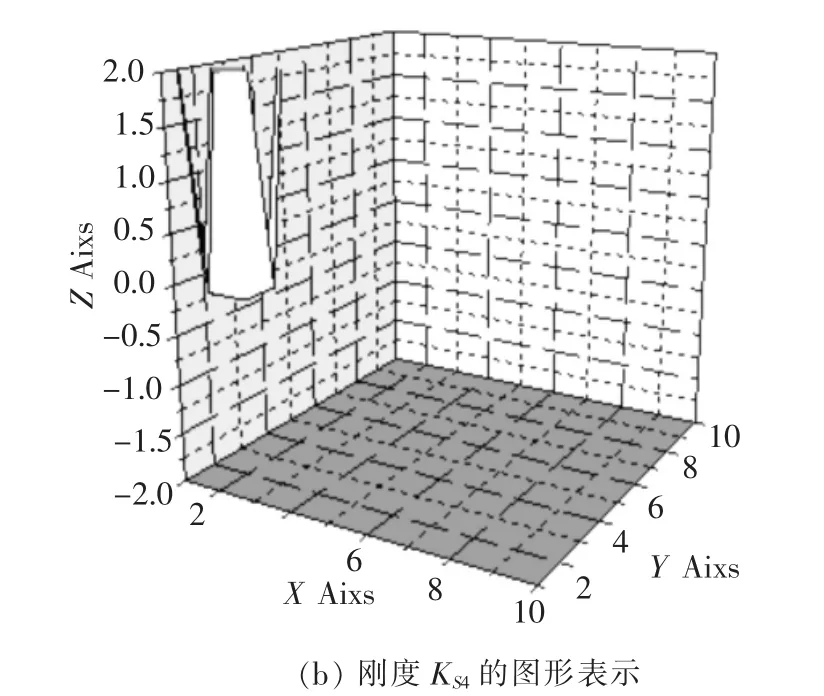
图16 刚度KS3和KS4的对比图
由图16可知:KS4的最小值远远大于KS3的最小值;KS4的变化范围远远小于KS3的范围.从而得出SPS全柔顺支链优于SPS柔性支链,设计全柔顺支链的方法可行性.
6 结论
文中对2RPU-2SPS并联机构作了分析.先根据并联机构设计出柔性并联机构,然后再在此基础上设计出全柔顺并联机构.利用ANSYS软件对全柔顺并联机构的支链进行拓扑优化,综合各方面的因素,得出全柔顺机构的各个支链的构型.分析柔性并联机构和全柔顺并联机构支链的刚度,并对结果进行对比,得出:①全柔顺并联机构的支链刚度大于柔性支链的刚度;②全柔顺并联机构设计的必要性;③为全柔顺并联机构的整体设计提供了依据;④为全柔顺并联机构的整体刚度大于柔性并联机构的整体刚度的假设提供帮助.
[1]Lee Jae-Jong,Choi Kee-Bong,KimGee-Hong.Design and analysis of the single-step nanoim printing lithography equipment for sub-100 nm linewidth[J].Current App lied Physics,2006(6):1007-1011.
[2]Lee Jae-Jong,Choi Kee-Bong,Kim Gee-Hong,et al.The UV-nanoim print lithography with multi-head nanoim printing unit for sub-50nm half pitch patterns[C].Korea:SICEICASE International Joint Conference,2006:4902-4904.
[3]王华,张宪民.整体式空间3自由度精密定位平台的优化设计与试验[J].机械工程学报,2007,43(3):65-71.
[4]荣伟彬,王乐峰,孙立宁.3-PPSR并联微动机器人静刚度分析[J].机械工程学报,2008,44(1):13-24.
[5]杨启志,马履中,郭宗和,等.全柔性并联机器人支链静刚度矩阵的建立[J].中国机械工程,2008,19(10):1156-1159.
[6]范彩霞,刘宏昭,张彦斌.基于构型演变和李群理论的2T2R型四自由度并联机构构型综合[J].中国机械工程学报,2010,5(9):1101-1105.
[7]黄真,赵永生.赵铁石.高等空间机构学[M].北京:高教出版社,2006:1-300.
[8]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997:1-350.
[9]刘宏伟.基于螺旋理论的少自由度并联机构运动分析[J].制造业自动化,2009,31(7):101-103.
[10]江涛,朱大昌.空间三平移柔顺并联超精密定位平台设计与分析[J].煤矿机械,2011,32(10):49-52.
[11]高耀东,刘学杰.ANSYS机械工程应用精华50例[M].北京:电子工业出版社,2011:1-599.
[12]周文闻,何广平.平面全柔性并联机构柔性铰链的优化分析[J].北方工业大学学报,2007,19(1):20-27.
[13]梁毓明,陈德海.轮式移动机器人调速系统的设计[J].江西理工大学学报,2008,29(4):13-16.
Research of the Stiffness and structure design for 2RPU-2SPS whole compliant parallel manipulator
ZHU Da-chang,LI Pei,CUI Xiang-fu,YAN Zhi-ming
(School of Mechanical and Electrical Engineering,Jiangxi University of Science and Technology,Ganzhou 34100,China)
2RPU-2SPS type parallel mechanism is an asymmetrical structure composed of RPU branched chain and SPS branched chain,and has a kinetic characteristic of two-dimension translations and two-rotation.Based on kinetic characteristic of the 2RPU-2SPS parallel mechanism,2RPU-2SPS flexible parallel mechanism is designed by using a substitution method.With ANSYS software,the 2RPU-2SPS flexible parallel mechanism and whole compliant parallel manipulator modeling are built,and the topology optimization of 2RPU-2SPS whole compliant parallel manipulator is carried out.Then the new type 2RPU-2SPS whole compliant parallel manipulator which has whole complaint characteristics is designed.The contrastive results show as following:the stiffness of the whole compliant chain is bigger than the flexible chain's,and the design method provides theoretical basis for an integral design of spatial whole compliant parallel manipulator.
flexible parallel mechanism;whole compliant parallel manipulator;kinetic characteristic;stiffness of a chain;simulation analysis
TH112
A
2012-09-16
国家自然科学基金资助项目(50965007、51165009);江西省教育厅科技计划项目(GJJ11484)
朱大昌(1973-),男,副教授,主要从事并联机器人及控制等方面的研究,E-mail:zdc98998@163.com.
2095-3046(2012)05-0044-07
