7维稳定耗散LV系统性质初探*
2011-12-17张建钢
张建钢
(浙江师范大学数理与信息工程学院,浙江金华 321004)
0 引言
Lotka-Volterra系统(LV系统)是指下面的常微分方程组:

式(1)中:xi表示第i个物种的种群密度;aij表示种间作用系数;λi是与环境相关的参数.这类系统广泛存在于物理、力学、化学、工程及社会经济等领域.
由于方程的动力学性质与作用矩阵A=(aij)n×n的代数性质密切相关,因此,根据矩阵A的特点,通常将LV系统分为3类:互利合作型(或相互竞争型)、保守型及耗散型.
前两类系统已被大量研究,耗散型系统尤其是稳定耗散系统的研究则相对较少.文献[1]对3维稳定耗散系统的充要条件作了分析;文献[2]对3维实耗散矩阵的充要条件作了详尽的探讨.一般性判断一个矩阵是否为稳定耗散有相当的难度,通过分类限定条件分析稳定耗散矩阵A的条件不失为一种有效的方法.例如,文献[3]用图表示LV系统,不同的作用矩阵可以唯一地对应一个图,对作用矩阵A所表示的图G(A)进行分类是合理的.鉴于此,文献[4]进一步讨论了稳定耗散矩阵的判定问题,并提出了最大稳定耗散图的概念,对5维系统进行了拓扑分类及动力学研究.文献[5]对4维稳定耗散系统的代数条件进行了充分研究;文献[6]对6维最大稳定耗散系统作了拓扑分类及动力学研究.本文对7维稳定耗散系统进行拓扑分类,结合耗散图的特点,按大类分析了系统最大稳定耗散的代数条件,并选择2类系统进行动力学性质剖析.
1 预备知识
为便于讨论,先介绍一些基本概念.
定义1[3]若存在正定对角阵D>0,使得AD+DAT是半负定的,则称矩阵A是耗散的.
注1 定义1中的AD+DAT可由DA+ATD替代.2种定义是等价的[7].
定义2[3]若矩阵A与˜A中的元素满足˜ajk=0⇔ajk=0,则称˜A为A的一个扰动.

若作用矩阵是耗散的(稳定耗散的),则称对应的LV系统(1)是耗散的(稳定耗散的).
文献[3]按这样的规则引进作用矩阵A的图形表示G(A):G(A)共有n个顶点,若aij≠0或aji≠0(i≠j),则顶点i和j之间有边相连;若aii=0,则顶点i用◦表示;若aii≠0,则顶点i用·表示.
定义4[4]设G(A)为作用矩阵A的表示图,若A是稳定耗散的,但A^不是稳定耗散的(A^是指G(A)添加任意一条或几条边得到的图所对应的任意一个矩阵),则称G(A)为最大稳定耗散图.
对于耗散的矩阵,不难验证aii≤0,(i=1,2,…,n).关于稳定耗散矩阵,有下面结论:

命题2[7]若A为稳定耗散矩阵,i与j为G(A)相邻的2个点,则aiiajj>aijaji.
命题3[7]若A为稳定耗散矩阵,则G(A)中的每个圈至少有一个满足aii<0,ajj<0的强连接[i,j].
命题 4[4]若 ajj<0(j=1,2,…,n),则 A∈SD当且仅当存在 D=diag(d1,d2,…,dn)>0,使得 DA <0.
命题5[4]若所有的aii=0,或某个akk<0,且对所有i≠k有aii=0,则A∈SD当且仅当:1)G(A)是无圈的;2)aij≠0⇒aijaji<0.
命题6[4]若不止一个 aii<0,不失一般性,假设 aii<0(i≤k)及 ajj=0(j> k),M=(aij)(1≤i,j≤示G(A)中删除同时满足i≤k和j≤k的连接[i,j]后所得的图,则A∈SD当且仅是无圈的;2)∃diag(d1,d2,…,dn)>0,使得D0M <0,diaij+djaji=0对一切i>k或j>k成立.其中,D0=diag(d1,d2,…,dk).
2 主要结果
2.1 7维最大稳定耗散图的分类
根据稳定耗散矩阵的上述性质及最大稳定耗散图的定义,经过筛选可得定理1(鉴于篇幅所限,不再给出相应的图).
定理1 对所有7×7稳定耗散矩阵,正好对应229种不同拓扑结构的最大稳定耗散图.
2.2 稳定耗散矩阵的代数条件
结合定理1的分类结果,下面分4大类讨论矩阵成为稳定耗散的充要条件.
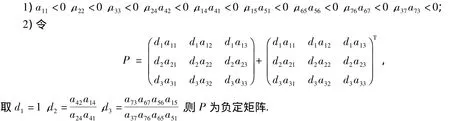
第1大类,不含黑点或只含1个黑点的图(共59种).运用命题4,易得定理2.
定理2 在所有7维最大稳定耗散图中,对不含黑点或只含1个黑点的图G(A),对应的作用矩阵是稳定耗散的充要条件是:∀i≠j,aij≠0⇒aijaji<0.
第2大类,只含2个黑点的图(共79种).此处仅以图1为例给出结论,针对其他情形,除下标及形式稍加变化外,结论都与此相类似.

图1 7维最大稳定耗散图中仅含2个黑点的例图
定理3 对图1所示的只含2个黑点的图G(A)对应的作用矩阵A是稳定耗散的充要条件是:

3)当 a12a21=0时,有

当式(2)或式(3)满足时,都有

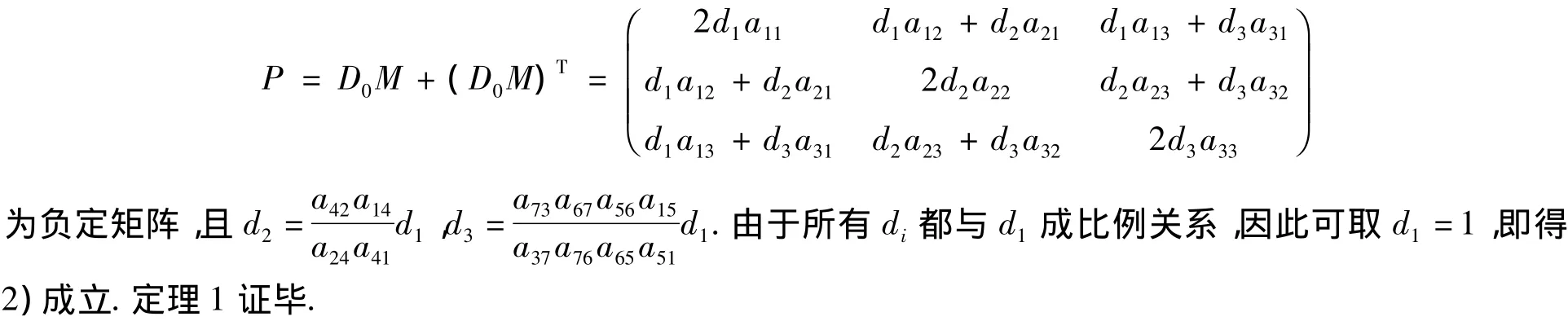
又由于d1a11<0,于是xDAxT≤0恒成立,也即有x(DA+ATD)xT=2xDAxT≤0恒成立.因此,A为耗散矩阵.对A任意充分小的扰动˜A同样满足定理3中的3个条件,于是˜A也为耗散矩阵,因此A∈SD.
必要性 由图1可知,a11≠0,a22≠0,a33=a44=… =a77=0;同时,根据 A是耗散的知,a11≤0,a22≤0,因此 a11<0,a22<0.由于 A∈SD,故由命题 2 可得 a13a31<0,…,a54a45<0.因此,1)成立.由于 A是耗散的,故可找到 D=diag(d1,d2,…,d7)>0,使得对∀x∈R7,有 xDAxT≤0,即

于是,令 x=(0,0,0,x4,1,0,0),得(d4a45+d5a54)x4≤0 对一切 x4都成立.此时,d4a45+d5a54=0.再分别令 x=(0,0,0,0,x5,1,0),x=(0,0,0,0,0,x6,1),x=(1,0,0,0,0,0,x7),x=(1,0,x3,0,0,0,0),x=(0,1,x3,0,0,0,0),得 d5a56+d6a65=0,d6a67+d7a76=0,d1a17+d7a71=0,d2a23+d3a32=0,d1a13+d3a31=0.因此,

第3大类,只含3个黑点的图(共58种).此处仅以图2为例给出结论,针对其他情形,除下标及形式稍加变化外,结论都与此相类似.

图2 7维最大稳定耗散图中仅含3个黑点的例图
定理4 对图2所示的只含3个黑点的图G(A),对应的作用矩阵A是稳定耗散的充要条件是:

必要性 由图2及命题2,易证1)成立.根据命题6,∃D=diag(d1,d2…,d7)>0,使得 D0M <0,diaij+djaji=0 对一切 i>3 或 j>3 成立.其中 D0=diag(d1,d2,d3).于是
注2 只含4,5,6个黑点的情形共有32种拓扑结构,这些系统都有与定理4类似的结论.
第4大类,全为黑点的图(共1种).
定理5 在所有7维稳定耗散图中,对全为黑点的图G(A),对应的作用矩阵A是稳定耗散的充要条件是:
1)aii<0,i=1,2,…,7;
2)∃D=diag(d1,d2,…,d7)>0,使得 D*A*<0,D*B*<0,其中 D*,A*,B*分别为将 D,A,B 删除最后一行与最后一列后所得到的矩阵,B=A-1.
证明 结合命题4及文献[7]中的定理2,容易证得本结论.
2.3 稳定耗散矩阵的动力学性质
下面讨论7维稳定耗散系统的动力学性质.由于种类太多,本文仅讨论全白点图的情况,如图3所示,将它们所对应的LV系统分别标记为S(1),S(2),…,S(11).

图3 7维最大稳定耗散图(全白点情形)
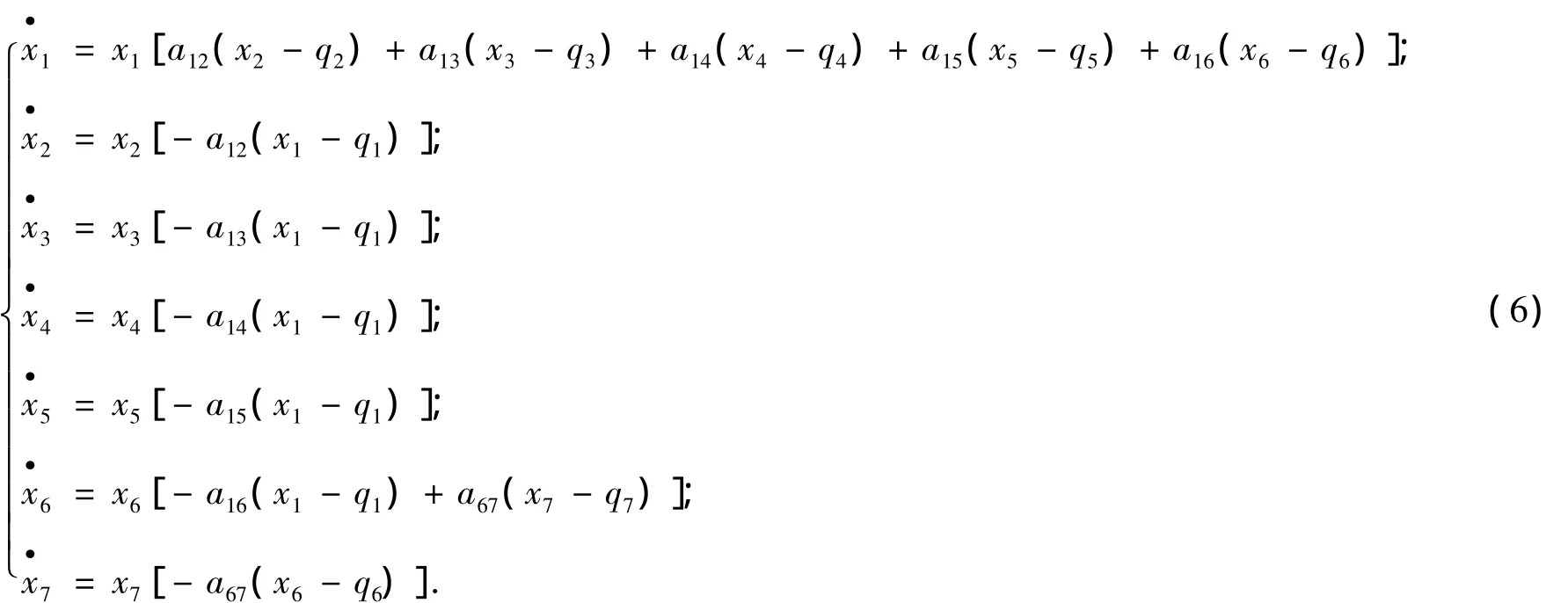
为此,假定系统有正平衡点q=(q1,q2,…,q7),于是系统(1)可表述为

由于图3中的各个图的顶点均为白点,故aii=0(i=1,2,…,7).又由于图3具备树型结构,故运用定理1及文献[8]的命题2.1可知它们对应的系统也是保守系统.因此,存在D=diag(d1,d2,…,d7)>AD为反对称矩阵.本文假设系统已经作了上述尺度变换.
针对以上系统,选择S(11),S(9)进行研究.
定理6 系统S(11)存在1个过点q的2维不变子流形,它被系统的周期轨充满;系统S(9)存在2个过点q的2维不变子流形,每个子流形被系统的周期轨充满.
证明 设作用矩阵A为反对称矩阵.系统S(11)的方程为

平衡点q处的线性化矩阵为

经计算得特征值为:

因为a21i>0,qi>0,所以λ6,λ7为一对共轭纯虚根.由Lyapunov次中心稳定性定理可知,系统 S(11)存在过q的2维不变子流形,它被系统的周期轨充满.
系统S(9)的方程为
平衡点q处的线性化矩阵为

经计算得特征值为:

其中:

因此λ4,λ5为一对共轭纯虚根,λ6,λ7为一对共轭纯虚根.由Lyapunov次中心稳定性定理可知,系统S(9)存在2个过q的2维不变子流形,每个子流形被系统的周期轨充满.
[1]Cross G W.Three types of matrix stability[J].Linear Algebra and Its Applications,1978,20(3):253-263.
[2]郭志明,周之铭,王寿松.3 ×3 实矩阵的 Volterra乘子[J].数学的实践与认识,1995,25(1):47-54.
[3]Redheffer R,Zhou Zhiming.Global asymptotic stability for a class of many-variable Volterra prey-predator systems[J].Nonl Anal T M A,1981,5(12):1309-1329.
[4]Zhao Xiaohua,Luo Jigui.Classification and dynamics of stably dissipative Lotka-Volterra systems[J].International Journal of Non-Linear Mechanics,2010,45(6):603-607.
[5]戴灿华.四阶稳定耗散Lotka-Volterra系统的分类和动力学性质[D].金华:浙江师范大学数理与信息工程学院,2010.
[6]陈莉莉.Lotka-Volterra系统及相关推广系统的耗散性及动力学[D].金华:浙江师范大学数理与信息工程学院,2009.
[7]Redheffer R.Volterra multipliers Ⅱ[J].SIAM J Alg Disc Math,1985,6(4):612-623.
[8]Duarte P,Fernandes R L,Oliva W M.Dynamics of the attractor in the Lotka-Volterra equations[J].Journal of Differential Equations,1998,149(1):143-189.
