基于局域参考站网络伪距观测的钟差估计及应用
2011-12-03李浩军王解先刘三枝
李浩军,王解先,刘三枝
(1.同济大学 测量系,上海200092;2.中国科学院 上海天文台,上海200030;3.同济大学 现代工程测量国家测绘局重点实验室,上海,200092;4.南京工业大学 土木工程学院,江苏 南京210009)
目前,IGS(international global service)在全球建立了近100个实时观测站,大部分都是IGS参考站.除此之外,很多国家和地区建立了局域性的观测站 网 络,例 如 德 国 的SAPOS 网 络[1-2]、日 本 的GRAPES网络[1-2]等,我国近年也启动了陆态网络工程,将在全国范围内建立约250个实时连续参考站.随着全球以及局部GNSS(global navigation satellite system)参考站网络数量的增多,近年来,基于网络服务及相关算法的研究受到了国内外学者的重视.基于GNSS参考站网络观测分析、估计与卫星相关的误差、观测量特性的研究较多.有学者基于全球IGS参考站网络,研究了精密单点定位中影响模糊度参数不为整数的UPD(uncalibrated phase delays,未检校的相位延迟),进而以整数的特性来固定非差模糊度[3-4];也有的基于全球GNSS 网络相位、伪距观测进行卫星钟差的估计,解算需要一定时间来初始化[5-6].伪距和相位观测都是GPS接收机观测量之一,二者最大的区别就是相位观测中存在整周模糊度,因而增加了以相位观测定位及其他解算时估计参数的个数,并且整周模糊度参数的收敛需要一定的时间,会影响实时钟差的发送及相应用户的使用.笔者以局域参考站网络的伪距观测估计GPS卫星的实时钟差,可以避免钟差求解、单站定位时参数的收敛问题,达到快速服务、定位的目的,同时研究相应服务的可靠性,分析对应结果的精度.
1 基于伪距观测的卫星钟差估计
伪距无电离层观测组合为

式中:Pj为接收机对GPS卫星j的无电离层伪距观测 值;c为 光 速;ρj为 站 星 之 间 距 离;δ为 接 收 机 钟差;δj为卫星钟差;tj为对流层延迟;ε(PIF)j为其他误差项,包括潮汐改正、地球自转等以及未被模型化的误差.对同一历元进行星间差分,消去接收机钟差,整理得到

进一步整理得到

式中:Pj,i为卫星i与卫星j伪距观测值之差;ρj,i为站星之间距离的星之间差;tj,i为对流层延迟的星间差;ε(PIF)j,i为卫星i与卫星j其他误差项之差,包括潮汐改正、地球自转等以及未被模型化的误差之差.对流层延迟可以采用模型来改正,GPS卫星轨道可以采用IGS 中心提供的超快速预报星历IGU(Ultra-PRD)[7-8],因此,只要观测站的坐标已知,就可以估计得到GPS卫星钟差的星间差,即相对钟差.由于局域参考站的坐标已知,基于参考站网络观测,可以实时估计GPS卫星钟差.
2 基于伪距观测和实时钟差的单站定位模型
对伪距无电离层组合星间差分公式(2)线性化,得到


由式(5)可以得到,只要卫星数大于等于4 颗时,就可以采用最小二乘或卡尔曼滤波估计位置参数.
3 实时单点定位及精度分析
实时单站定位,必须以基于参考站网络观测的实时精密钟差估计和超快速轨道(IGU)的下载为前提.其流程见图1.

图1 实时单站动态定位流程图Fig.1 Flow chart of real-time kinematic point positioning
通过实时下载或接收每个基准站的伪距观测数据,并利用下载的IGU、各种改正模型(固体潮、地球自转、对流层延迟等模型),即可按照式(3)估计卫星钟差.假设参考站网络中基准站数为k,每个基准站估计得到的卫星钟差为δj,i,n(n=1,…,k),一般情况下,最终的钟差估计值可以写为

由于伪距观测噪声以及难以模型化误差的存在(其对每个基准站钟差估计值的影响不同),在以每个基准站的观测值估计得到卫星钟差δj,i,n(n=1,…,k)之后,采用选权的方法计算最终的卫星钟差.采用的权函数[11]为

在估计得到卫星钟差之后,发送到接收机,接收机结合IGU、伪距观测,以实时钟差进行实时动态定位.2009年1月11号,以上海9个基准站的采样、间隔为30 s的实时观测数据,实时估计钟差.选择11号卫星为基准星时,估计跟踪到卫星的钟差.限于篇幅,列举个别卫星对应的结果.其中8 号和28 号卫星的结果如图2a,b所示.

图2 8号和28号卫星钟差结果Fig.2 Clock error of number 8and 28satellite
基于估计得到的实时钟差,以同济大学基准站24h采样间隔为30s的实时观测数据,采用最小二乘估计方法解算实时位置.以同济大学基准站为站心坐标系,北、东、上三个方向的RMS(root mean square,均方根)值分别为0.445,0.529,1.124m,对应结果见图3.
从图3得到:基于局域参考站网络伪距观测估计实时钟差,并采用估计得到的钟差结合伪距观测单点定位时,单历元动态定位在北、东方向精度优于2m,上向的绝大部分精度优于2m.对2009年1月12号到21号10d的观测数据进行解算,其RMS定位结果见表1.
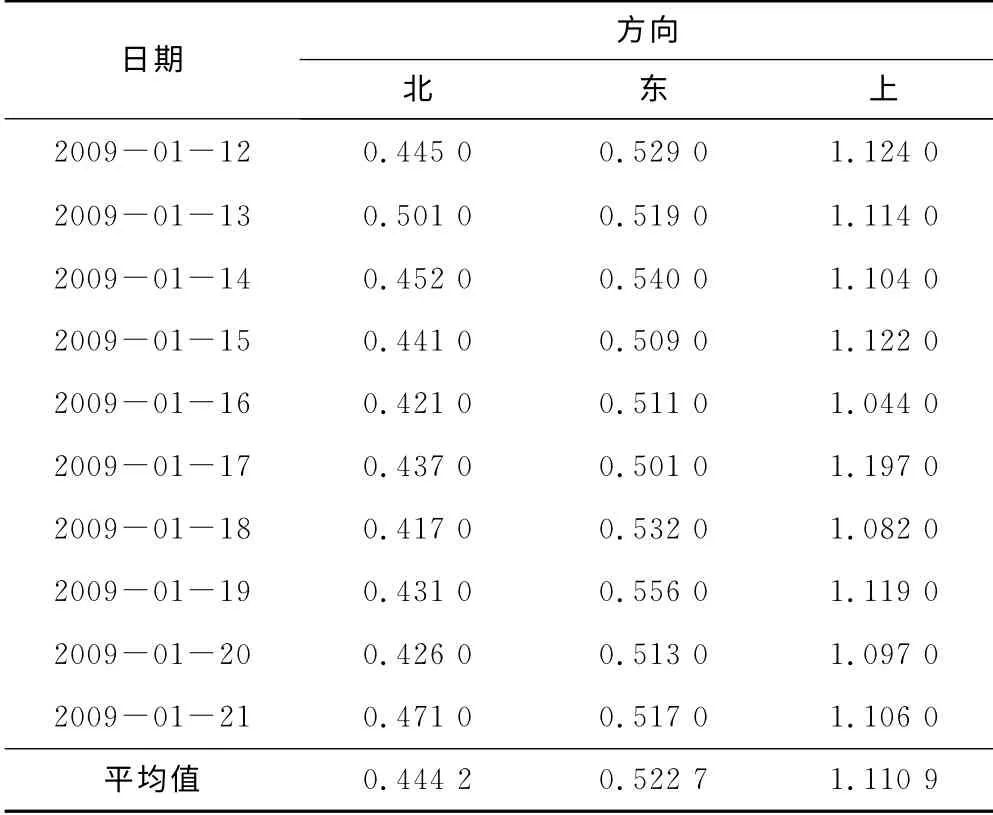
表1 各日期的定位结果Tab.1 Positioning solutions of different days m
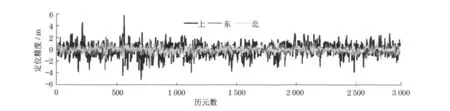
图3 动态定位结果Fig.3 Kinematic positioning results
从表1可以得到,基于局域参考站网络伪距观测估计卫星钟差,然后采用伪距观测定位时,其定位结果在北、东方向的RMS可以达到0.444 2m,上向可以达到1.110 9m.基于局域参考站网络解算得到的钟差,结果中包含了一些难以用模型改正的误差、系统偏差.采用估计的钟差结果定位时,这些误差、偏差会投影到伪距的定位结果中,可减弱这些难以改正、消除的误差对定位结果的影响,从而提高定位的精度.这一思维可以应用到的类似相位观测定位中,进一步降低相位单站定位中的误差影响,提高定位精度.
4 结论
定位在北、东、上三个方向对应的RMS值分别为:0.444 2,0.522 7,1.110 9m.基于局域参考站网络伪距观测的卫星钟差估计及实时动态单点定位的实现,对于高精度卫星导航的发展及应用都具有重要的意义.研究发现[2],若以相位观测采用相似于本文实时钟差估计方法的算法进行定位,精度会更高,北、东两个方向优于2cm,上向优于4cm.随着我国陆态网络的建立,以及相关服务的逐渐拓展,基于参考站网络大范围定位服务相关方面的研究尤为重要.基于参考站网络相位、伪距观测的卫星钟差估计及相应定位技术的实现,对我国大范围、广域实时定位的实现和使用,具有一定的现实意义.
[1] 李浩军.实时精密单点定位及其相关理论研究[D].上海:同济大学土木工程学院,2010.LI Haojun.The research on real-time precise point positioning and related theory[D].Shanghai:Tongji University.College of Civil Engineering,2010.
[2] 李浩军,王解先,陈俊平,等.基于GNSS网络的实时精密单点定位及精度分析[J].地球物理学报,2010,53(6):1302.LI Haojun,WANG Jiexian,CHEN Junping,et al.Realization and analysis of GNSS network based real-time precise point positioning[J].Chinese Journal of Geophysics,2010,53(6):1302.
[3] Ge M,Gendt G,Dick G,et al.Improving carrier-phase ambiguity resolution in global GPS network solutions[J].Journal of Geodesy,2005,79(13):103.
[4] Ge M,Gendt G,Rothacher M,et al.Resolution of GPS carrierphase ambiguities in precise point positioning(PPP)with daily observations[J].Journal of Geodesy,2007,82(7):389.
[5] 耿涛,赵齐乐,刘经楠,等.基于PANDA 软件的实时精密单点定位研究[J].武汉大学学报:信息科学版,2007,32(4):312.GENG Tao,ZHAO Qile,LIU Jingnan,et al.Real-time precise point positioning based on PANDA software[J].Journal of Wuhan University:Geomatics and Information Science,2007,32(4):312.
[6] 楼益栋,施闯,周小青,等.GPS卫星钟差估计与分析[J].武汉大学学报:信息科学版,2009,34(1):88.LOU Yidong,SHI Chuang,ZHOU Xiaoqing,et al.Realization and analysis of GPS precise clock products[J].Journal of Wuhan University:Geomatics and Information Science,2009,34(1):88.
[7] Andre’Hauschild,Oliver Montenbruck.Kalman-filter-based GPS clock estimation for near real-time positioning[J].GPS Solutions.2009.13:173.
[8] Li H,Chen J,Wang J,et al.Network based real-time precise point positioning[J].Adv Space Res,2010,46(9):1218.
[9] Jensen A,Ovstedal O.The Effect of different tropospheric models on precise point positioning in kinematic model[J].Survey Review,2008,40(308):173.
[10] 李浩军,王解先,胡丛玮.GPS对流层延迟的历元间差分分析[J].同济大学学报:自然科学版,2010,38(3):448.LI Haojun,WANG Jiexian,HU Congwei.Analysis of epochdifference values of GPS troposphere delay[J].Journal of Tongji University:Natural Science,2010,38(3):448.
[11] Yang Y.Robust estimation of geodetic datum transformation[J].J Geod,1999,73:268.
