空间通视性对高速公路隧道路段驾驶行为的影响
2011-12-03戴忧华郭忠印
戴忧华,郭忠印
(1.同济大学 交通运输工程学院,上海201804;2.广州市高速公路有限公司,广东 广州510028)
隧道是高速公路穿越山岭重丘区的比较经济的工程方案,有别于以往深挖路堑和盘山绕行的方式,具有改善路线线形、缩短行车里程、提高运行效率及保护环境的重要作用.隧道作为中间封闭两端开口的特殊结构物,运行环境有别于一般开放性路段,因此,研究隧道路段的驾驶行为,对于研究事故发生机理,改善隧道路段交通安全状况具有重要意义.
国内外曾开展一些隧道路段驾驶行为的相关研究.世界道路协会(PIARC)及联合国经社理事会隧道安全专家组等机构提出了在各种情况(正常、拥塞、事故、火灾)应遵循的最佳行为.Ir.Evert Worm研究了隧道内人的行为是如何影响隧道安全的,以及怎样去影响驾驶行为以达到较好的交通安全水平[1-2].Boer L C 分析了在隧道交通拥堵、烟雾等情况下,驾驶行为对隧道安全的影响[2].荷兰应用科学研究组织(TNO)认为,隧道的特殊设计包括隧道的长度、类型、宽度,隧道路线曲线的数目、曲度及波动,以及照明情况等,在很大程度上影响着驾驶员的行为以及主观安全感[3].Geva Vashitz等人研究了公路隧道内车载信息系统的应用,认为较多情报的显示能够提供给驾驶员信息,从而减少经过隧道产生的心理不安和烦躁[4].潘晓东、杜志刚等基于驾驶员生理反应,研究公路隧道进出口视觉与行车安全的关系[5-6].同济大学郭忠印课题组对隧道进出口的运行安全进行了研究,认为进出口线形过渡、照明过渡、路面抗滑性能过渡是隧道安全的主要影响因素[7].
笔者从隧道空间通视性对驾驶行为的影响出发,分析空间通视性的影响要素,并对隧道空间通视性临界条件进行理论计算.通过研究空间通视性对驾驶行为的影响结果,提出了基于空间通视效应的隧道类型划分.隧道路段驾驶行为研究为隧道几何线形安全设计、运行安全管理提供了基础依据.
1 空间通视性概念的提出
1.1 驾驶员的前视策略
驾驶员在车辆行驶过程中要不断注视前方,观察环境变化.其视觉随着运行速度和运行环境的变化而变化的特性称为视觉特性[8].隧道作为一种中间封闭两端开口的结构物,其运行环境与开放型路段、立交、桥梁等不同,行驶过程中驾驶员视野和视距受诸多因素限制.一般来说,视野随车速的变化而变化,同样,车速随视野的变化而变化,即驾驶员总是根据其视野大小来选择行驶速度.当前方出现转弯、纵坡、隧道洞口等使视野变小时,驾驶员会相应的降低速度;当前方为长直线或者大半径平曲线通视良好时,视野增大,驾驶员会提高速度.
1.2 空间通视性的定义
隧道空间通视性,是指在隧道路段三维空间中,车辆以一定速度行驶时,驾驶员在动视角范围内(夜晚时为车辆前灯照射范围),沿着道路前进方向,从隧道进口外5S处开始搜索直至进口处,在该路段范围内驾驶员识别隧道出口的几率.如图1,2所示.
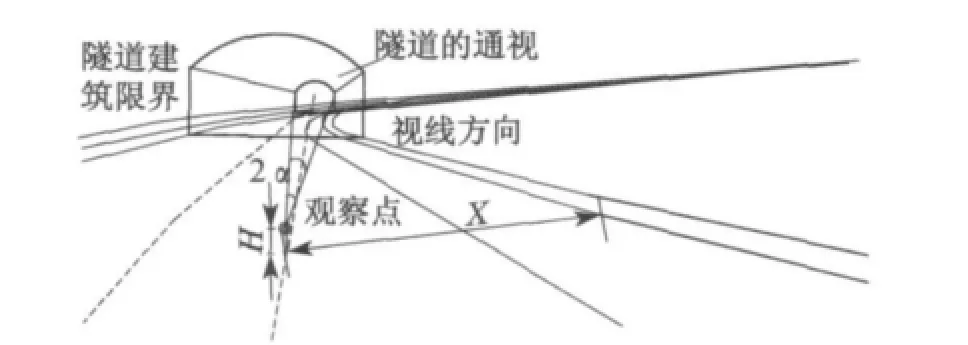
图1 空间通视性隧道水平示意图Fig.1 Horizontal diagram of tunnel spatial visual pattern

图2 通视搜索范围纵向示意图Fig.2 Vertical diagram of spatial visual searching range
图中,H为视点高度,是驾驶员眼睛与路面之间的距离;视线方向即为三维空间曲线上视点的切线方向;α是驾驶员横向于路面方向的视线偏角,用于确定清晰视野的范围;X为驾驶员视点的水平横向距离;不同设计速度的隧道对应于不同的隧道建筑限界;S为空间通视性纵向搜索范围,根据现场试验调查结果,驾驶员感知隧道并采取相应驾驶操作的位置;L为隧道全长.
从隧道空间通视性的定义可见,隧道路段空间通视的概念与道路工程领域已有的很多视距概念不同.这些视距概念是根据人的反应时间、行车速度和路面磨擦系数确定的,是一种极限情况.通常速度确定,不管在哪条路上,计算出的视距都是近似相等的.
隧道空间通视性则是驾驶行为的致因,即通视与否与驾驶行为的变化规律紧密联系.在隧道空间通视性的研究中,可以对不同道路条件的隧道空间通视性进行理论分析.如果隧道通视,驾驶员认为隧道各环境要素满足驾驶预期,一般不减速或者减速幅度极小;反之,驾驶员主观认为存在驾驶未知因素,驾驶小心谨慎,在隧道进口路段采取减速行为.
从以上分析可知,隧道的空间通视性表达了两层含义:①人的视觉特性和隧道运行环境要素决定了隧道的通视性;②空间通视性与人的驾驶心理的关系,体现了对交通安全的影响.
1.3 假设条件
将空间通视性概念应用于隧道路段交通安全研究时,仍然有不足之处.例如:①前方有大货车行驶,且前后车相距不远,则对后车来说,无论是小客车还是大货车,因前车造成的视线遮挡,可能都无法达到空间通视的效果;②交通量较大,驾驶员的驾驶行为主要受交通流密度的影响,而无法按照驾驶员的实际期望采取相应的驾驶行为;③出现车辆故障、前面超重车辆爬坡等情况.这三类情况都是比较常见的,但对于研究隧道路段本身的空间通视性来说却是不必考虑的.
驾驶行为是个复杂的过程,只有将这个复杂的过程简化到理想状态,才能进行理论上的分析.因此,只有当其他干扰因素都忽略的时候,隧道空间通视性才对驾驶行为起主导作用.为了将空间通视性概念应用于道路安全领域,对隧道空间通视性理论计算模型做出以下假设:①在自由流和正常的路面情况下,小型车和大型车均按规定车道行驶;②不考虑交通流中大货车和大客车等对视点的遮挡;③隧道空间通视性反映了驾驶员眼中隧道的物理特性,诸如半径、转角、亮度的过渡.
2 空间通视性影响要素分析
2.1 空间通视性的纵向搜索范围
我国《公路隧道设计规范》[9]规定,隧道洞口外连接线应与隧道洞内线形相协调;隧道洞口内外各3S设计速度行程长度范围内的平面线形应一致;隧道洞口内外各3S设计速度行程长度范围内的纵面线形应保持一致性,有条件时,宜取5S设计速度行程长度.根据郭忠印课题组的研究[7],隧道洞内外5S设计速度形成范围内平面线形应保持一致.见图3.
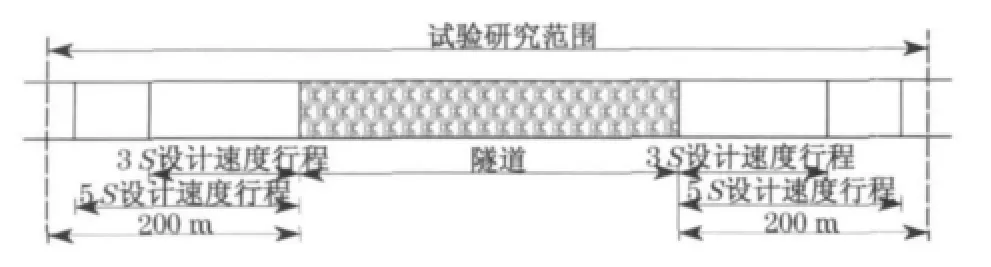
图3 隧道路段研究范围Fig.3 Research range of tunnel section
根据杨志清等人关于小汽车加减速性能的研究,取A 型车加速度为0.9m·s-2,按照加、减速距离公式(a为加速度,V1为制动后速度,V2为初始速度,s为制动距离),得出加、减速距离为200m,即后方线形影响范围[10].阎莹等人建立了基于公路线形综合指标的运行车速预测模型,确定前、后线形对当前断面运行车速的影响范围,前方线形影响范围为[100m,250m],后方线形影响范围近似都取200m[11],如图4所示.

图4 车速影响分析图Fig.4 Schematic diagram of speed influence range
在现场调研中发现,通过采用AM-2 600S机动车道路试验数据处理系统实测隧道路段连续运行车速的变化规律,可以发现,从驾驶员感知隧道的存在并采取明显的减速行为的区段,为洞外160~200m范围.综合实测数据中有关运行车速变化区段和车辆加减速性能确定的路段长度,以160 m 断面作为隧道空间通视性测算断面,即S=160m.
2.2 隧道路段几何线形及建筑限界
《公路隧道设计规范》[9]规定了隧道平、纵线形极限设计条件,高速公路隧道建筑限界如图5所示,其中LL,LR为左、右行车道侧宽度,取值见表1.
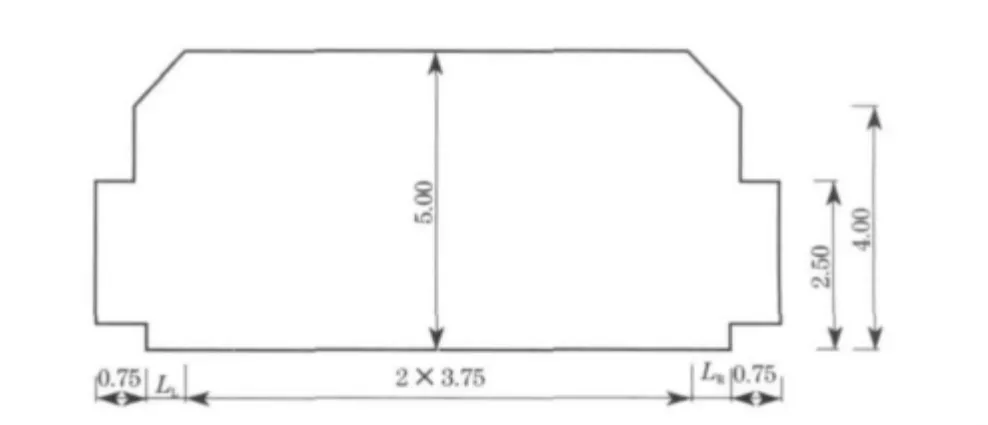
图5 高速公路隧道建筑限界(单位:m)Fig.5 Construction clearance of expressway tunnel(unit:m)
高速公路隧道建筑限界及横断面组成尺寸见表1,LR>LL,中国公路实行右侧行驶,驾驶人位于驾驶室左侧.故在考虑隧道建筑限界对空间通视性的影响时,应按左转曲线和右转曲线分别计算.W为车道宽度,Vs为设计速度.

表1 高速隧道建筑限界组成一览表Tab.1 Construction clearance of expressway tunnel
2.3 驾驶员视点及视线偏角的位置
车辆在隧道路段行驶时,由于隧道空间幽闭导致了“向墙效应”,故驾驶员在隧道内外的行驶位置是不同的,对隧道空间通视性进行计算时,只涉及隧道过渡段驾驶员视点计算,故对洞内车辆行驶位置不予计算.依据假设条件,计算驾驶员的视点位置时,按小型客车、大型货车车型分别行驶在内外车道进行计算.作为道路设计依据的小客车和载重货车的宽度分别为1.8m 和2.5m.根据调查,小客车的视点大约在其左侧0.5m 的位置,载重汽车的视点大约在其左侧0.6m 的位置,如图6所示.

图6 隧道过渡段车辆的视点位置示意图(单位:m)Fig.6 Driver visual position of tunnel transition section(unit:mm)
2.4 人体在明暗过渡环境的视觉特性
通过调研和分析知道,洞口内50m 范围内的亮度B递减速度主要受洞外亮度、太阳入射角、洞口朝向、路面和墙壁反射系数、灯具间距等的影响.大量研究表明,隧道口的亮度还受洞口绿化环境的影响较大.物体与其背景之间的亮度差ΔB与背景亮度Bb之比,称为亮度对比度,其中以洞外天空亮度为背景亮度,以各种工况下隧道出口亮度为物体亮度.对隧道出口辨识时,采用一定亮度对比度下的识别几率进行表征.
3 隧道空间通视性的理论计算
3.1 基于平曲线要素的隧道空间通视性理论计算
由于小型客车和大型货车的计算行驶车道和驾驶员相对于汽车的视点不同,导致两种车型在公路上行驶时的视线轨迹不同,因此,验算隧道的空间通视性时应根据小型客车和大型货车的特性分别计算.图7列举其中两种类型.如果计算结果显示不同车型计算所得隧道平曲线要素值相差不大,则确定隧道空间通视性时合并不同车型,否则对不同车型分别提出隧道平曲线要素.

图7 右、左转平曲线小型客车空间通视性验算示意图Fig.7 Spatial visual pattern checking of right and left horizontal of vehicle
因此,X=R(1-cosα/2).其中:R为视距轨迹所在曲线对应半径;α为临界平曲线半径对应在的曲线圆心角.依据cosα=1-α2/2!+α4/4!-…+(-1)n α2n/(2n)!,可直接计算平曲线半径.其中,α≈[(S+L)/R](180/π),得出X≈(S+L)2/8R.另外,不同的隧道设计速度对应于不同的隧道建筑限界.在计算设计速度120,100,80,60km·h-1下,极限状况通视性隧道半径和隧道长度关系如表2所示.
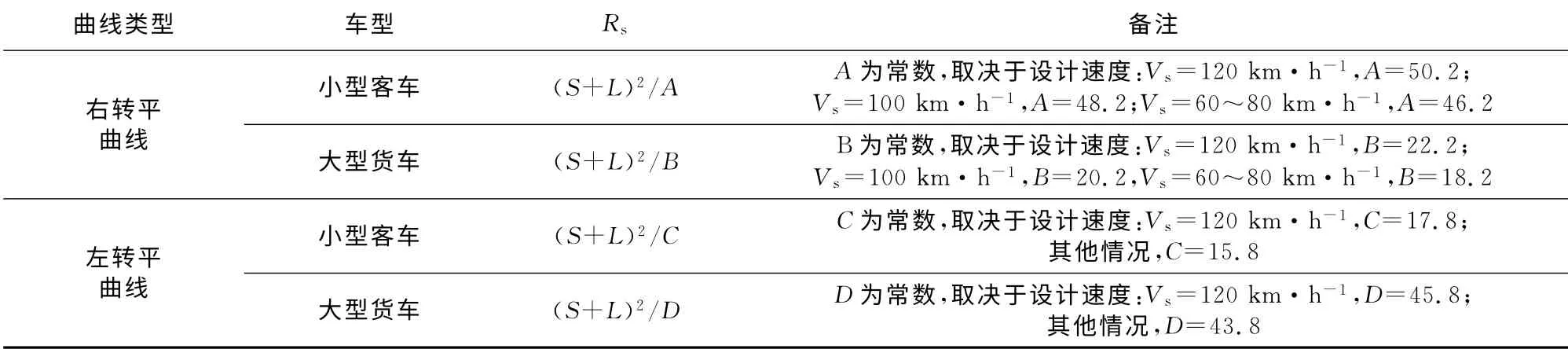
表2 平曲线路段不同车型的隧道空间通视性计算结果Tab.2 Spatial visual pattern calculation result of horizontal of different vehicle types
3.2 基于竖曲线要素的隧道空间通视性理论计算
对于隧道路段来说,凹形竖曲线易产生积水问题,对于地下水发育的路段不宜设计这种线形.凸曲线存在视线诱导性差的问题,故将其作为计算重点.当隧道处于凸竖曲线上时,其通视性受诸多约束条件限制,其中最关键的就是隧道在凸形竖曲线的位置.寻找通视性计算极限条件时,首先定义隧道所处的三种不同位置:①隧道进口位于竖曲线起点;②隧道有部分路段属于直坡段,部分位于竖曲线内;③车辆视点位置和隧道均位于竖曲线范围内.
根据规范[9],当设计速度为60km·h-1时,凸形竖曲线型隧道半径R的一般设计值为2 000 m;80 km·h-1时,为4 500m;100km·h-1时,10 000m;120km·h-1时,17 000m.对于R≥2 000m的弧来说,其曲率≤0.000 5,接近直线.故研究凸形竖曲线上隧道的通视性时,可简化以上三种工况.这里仅计算第一种,如图8所示.
图中,T为隧道建筑限界高度,C为极限通视视线切点,A点为空间通视性验算断面,α为隧道所在弧对应的圆心角,γ为BC弧所对应的圆心角,F为AB延长线与C点切线EC延长线的交点,因此FB=FC,即∠β=∠γ.令lDE=T,故tanβ=H/S+lBF.其中,H即为隧道空间通视性验算断面到隧道洞口距离,取H=160m,另外tanγ/2=lBF/R.由倍角公式tan 2θ=2tanθ/(1-tan2θ)推出lBF=(-RS+R由于H为驾驶员视点的高,相对于竖曲线半径可以忽略不计,经进一步简化,可得

图8 凸形竖曲线上空间通视性计算示意图Fig.8 Spatial visual pattern checking schematic diagram of convex vertical curve
根据图8中的三角关系,α=arc cosR/(R+T),可得

则隧道临界总长为

3.3 基于驾驶员视觉特性的空间通视性理论计算
观察物体时,通常背景不会绝对黑暗,总有一定亮度.假设物体的亮度为Bt,背景亮度为Bb,当亮度差ΔBj=(Bt-Bb)使得物体刚刚可见时,称为临界亮度差ΔBj.以三种不同的物体亮度为例,得到临界亮度差与背景亮度的关系如图9.

图9 临界亮度差与背景亮度Fig.9 Relationship between critical luminance difference and background luminance
若物体与背景之间的亮度差为ΔB≥ΔBj,物体就能被发现.亮度差越大,越容易看见.ΔB与Bb之比,称为亮度对比度,用C表示,C=ΔB/Bb.
识别几率是一种视觉生理阈限的度量,是正确识别的次数与识别总次数的比率,一般采用50%.另外,感知几率是指在一定的观察时间内能感知物体存在的比率.对隧道出入口,Sermin ONAYG_IL在论文中指出,隧道中障碍物的尺寸为20 cm×20 cm 时(能对车辆造成破坏的最小尺寸),驾驶员在100 m位置观察障碍物0.1 s,对物体的感知度基本在75%左右是具有代表性的感知能力.
上面提到了决定视觉过程的3个基本参量:C,α和Bb.若固定其中的1个量,就可以通过实验做出另外2 个量之间的关系曲线,见图10 的识别几率P=50%时的关系曲线.图中,以P=50%为阈限,曲线上面的P>50%,下面的P<50%.
根据隧道通视性的定义,通视性判断的搜索位置在隧道洞口外5S设计速度行程以外,故驾驶员判断时间远大于上面三图中的试验时间.故此,考虑正常情况下不同洞外光强检测仪所测得的天空亮度,将光强检测值E分为5 级:晴天光强,E>1 200;晴天光弱阴天光强,E=140~1 200;阴天光弱,E=114~140;光弱E=68~114;弱,E<68.每一等级中分别考察三种不同对比度——0.02,0.05,0.10.对照图10可见,识别几率均大于50%.

图10 识别几率相同时任意2个参数之间的关系Fig.10 Relationship between any two parameters of the same identification percentage
4 基于空间通视性的隧道路段驾驶行为
根据以上空间通视性理论计算结果,在现场实测实验中,分别选取空间通视型和非通视型隧道样本,提取驾驶员在两类隧道中行驶时的驾驶行为变化规律,如图11,12所示.同时,根据试验结果,两类典型隧道中驾驶员运行车速变化规律如图11,12所示.
第一类,空间通视型隧道.整个隧道有5个特征断面,分别为S0,SJ,S1,SC,S2.其中,SJ为隧道进口,SC为隧道出口.将整个隧道长度分为2个区段:①区段一,即进口调整段,其过渡性规律受线形和黑洞效应的影响;②区段二,即出口调整段,其过渡性规律受线形和白洞效应的影响.

图11 通视型、非通视型隧道驾驶行为变化区段划分示意图Fig.11 Driving behaviour variation under spatial visual pattern and un-spatial visual pattern

图12 空间、非空间通视型隧道运行车速变化规律Fig.12 Operation speed variation under spatial visual pattern tunnel and un-spatial visual pattern
第二类,非空间通视型隧道.有6 个特征断面,分别为:S0,SJ,S1,S2,SC,S3.特征点为6个,分为3个区段:①区段一,进口调整段,过渡性规律主要受线型和黑洞效应影响;②区段二,洞内适应段,过渡性规律只受线型影响;③区段三,出口调整段,过渡性规律受线型和白洞效应的影响.
5 结语
研究表明,空间通视型隧道具有显著相似的运行车速变化规律.从空间通视性角度对隧道路段驾驶行为的研究,对于分析隧道路段交通安全性、隧道群路段不同类型隧道组成、对交通流的影响,具有重要的参考价值.笔者将依据空间通视性、过渡段线形对隧道路段驾驶行为进行视频检测,进一步量化不同类型隧道其他驾驶行为特征的变化规律.
[1] Ir Evert Worm.Human behavior influent safety[R].Utrecht:Dutch Ministry of Transport,2006.
[2] Boer L C.Behavior by motorists on evacuation of a tunnel[R].[S.l.]:TNO,2002.
[3] Marjolein Baart,Hans Driever.Tunnel safety[J].TNO Traffic and Transport,2002(3):1.
[4] Geva Vashitz, David Shinar, Yuval Blum.In-vehicle information systems to improve traffic safety in road tunnels[J].Transportation Research Part F,2008(2):61.
[5] 杜志刚,潘晓东,郭雪斌.公路隧道进出口行车安全评价指标应用研究[J].同济大学学报:自然科学版,2008,36(3):325.DU Zhigang,PAN Xiaodong,GUO Xuebin.Evaluation index’s application studies on safety at highway tunnel’s entrance and exit[J].Journal of Tongji University:Natural Sicence,2008,36(3):325.
[6] 杜志刚,潘晓东,杨轸,等.高速公路隧道进出口视觉震荡与行车安全研究[J].中国公路学报,2007,20(5):101.DU Zhigang,PAN Xiaodong,YANG Zhen,et al.Research on visual turbulence and driving safety of freeway tunnel extrance and exit[J].China Journal of Highway and Transport,2007,20(5):101.
[7] 郭忠印,孔令旗,王琰,等.隧道进出口运行安全研究报告[R].上海:同济大学交通工程学院,2007.GUO Zhongyin,KONG Lingqi,WANG Yan,et al.Research on operating safety of the tunnel entrance and exit zone[R].Shanghai:Tongji University.College of Transportation Engineering,2007.
[8] 刘浩学.交通心理学[M].西安:陕西科技出版社,1992.LIU Haoxue.Traffic psychology[M].Xi’an:Shanxi Technogy Press,1992.
[9] 中华人民共和国交通部.JTG D70—2004 公路隧道设计规范[S].北京:人民交通出版社,2004.Ministry of Transport of the People’s Republic of China.JTG D70—2004Code for design of road tunnel[S].Beijing:China Communications Press,2004.
[10] 杨志清.高速公路空间视距与运行车速关系研究[D].上海:同济大学交通运输工程学院,2004.YANG Zhiqing.Research on the relation between expressway spacial sight-distance and operating speed [D].Shanghai:Tongji University.College of Transportation Engineering,2004.
[11] 阎莹.高速公路运行车速预测模型及其应用研究[D].上海:同济大学交通运输工程学院,2009.YANG Ying.Research on operating speed prediction model and application of freeway[D].Shanghai:Tongji University.College of Transportation Engineering,2009.
