旋转变压器在数字伺服舵机系统中的应用
2011-11-20朱沛洪张昆峰
朱沛洪,张昆峰
(中国空空导弹研究院,河南洛阳471009)
0 引 言
在舵机系统中,对舵面角位移的实时准确检测是实现控制的关键,目前舵机普遍采用带接触电刷的电位器作为角位移传感器,但电位器在恶劣环境下容易出现输出抖动等不良现象,影响到产品可靠性,因此,可以考虑采用旋转变压器替代电位器。旋转变压器作为角位移传感器,具有结构简单、动作灵敏、抗冲击振动和温度湿度变化能力强的优点,适用于恶劣的工作环境[1]。但是旋转变压器是一种模拟机电元件,其输出为两路与角位移呈某一函数关系的模拟信号,因此,为适应数字舵机系统的需要,需要对输出的模拟信号进行解码处理并将其转换为对应的包含角位移信息的数字量,才能与控制芯片接口[2]。美国AD公司、日本多模川公司研制的旋转变压器/数字转换器(RDC)均可以将旋转变压器输出的模拟信号解码并获取数字位置信息,但是对于需要测量多个角位移的舵机系统而言,可能需要多个RDC,成本高,同时造成舵机的控制电路体积增大,不利于系统的小型化和集成化。
1 正余弦旋转变压器
当励磁绕组以一定频率的交流电压励磁时,正余弦型旋转变压器的输出绕组的电压幅值与转子转角呈正弦、余弦关系[3]。旋转变压器的原理图如图1所示,它由定子和转子组成。图中D1-D2和D3-D4为旋转变压器的初级励磁绕组,一般安装于转子上;Z1-Z2和Z3-Z4为旋转变压器的次级输出绕组,一般安装于定子上。D1-D2与D3-D4和Z1-Z2与Z3-Z4电气角度均互差90°。为消除交轴磁通的影响,提高精度,一般将初级绕组的D3-D4短接。
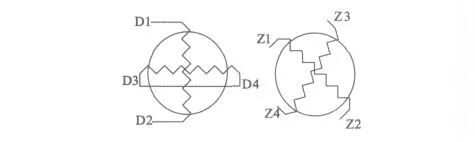
图1 旋转变压器
设ω为激励电压的角频率,U为激励电压的最大幅值,初级绕组和次级绕组的变比为K。当初级激励绕组D1-D2绕组外加交流激励电压ED1-D2=Usinωt,设激磁信号与次级绕组输出信号的相位差为α,处于空间某一位置的转子与定子夹角为θ,则次级两正交输出绕组中便感应出感应电势EZ1-Z2、EZ3-Z4,EZ1-Z2=KUsin(ωt+α)sin θ,EZ3-Z4=KUsin(ωt+α)cos θ。图2为激励频率为400 Hz时的EZ1-Z2、EZ3-Z4和激励信号ED1-D2。可以看到,旋转变压器的输出信号EZ1-Z2、EZ3-Z4的频率和激励信号ED1-D2的频率一样,而EZ1-Z2、EZ3-Z4的包络信号即为sinθ、cosθ[4]。
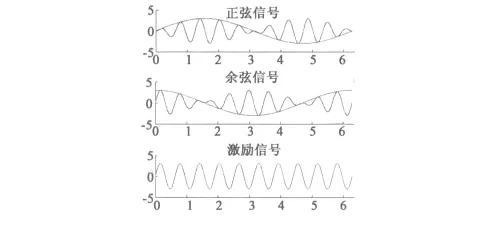
图2 激励频率为400 Hz时旋转变压器的激励信号和输出信号
旋转变压器解码就是通过检测EZ1-Z2、EZ3-Z4这两组输出信号的幅度获取旋转变压器的位置信息的。图3为旋转变压器解码电路的所普遍采用的解码方案。该方案不仅可以解算角位移,还可以解算角速度。
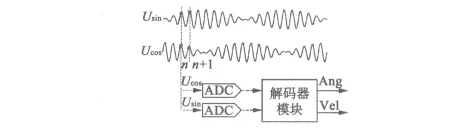
图3 旋转变压器解码电路
2 系统总体设计
本文实现了一个基于单极正余弦旋转变压器的数字舵机系统,采用国内某公司研制的一款用于电机控制的SOC G105作为控制核心,如图4所示。该芯片内部已经集成了4路旋转变压器激励和4路旋转变压器解码电路,可以同时支持4路旋转变压器信号的解码,并实时精确地提供角位移信息和速度信息,同时可以省去片外RDC,简化了舵机控制电路。
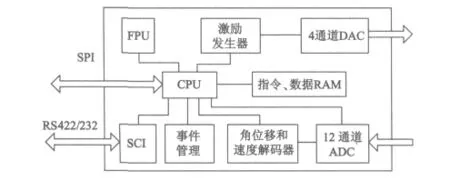
图4 G105内部原理框图
图5为采用G105完成的舵机系统框图。舵面的角位移检测采用旋转变压器作为测量传感器,旋转变压器与舵轴通过齿轮副联接,齿轮副传动比为3.78∶1。旋转变压器的激励信号由G105提供。旋转变压器输出包含舵面角位移信息的正弦信号sin和余弦信号cos,然后输入到G105的片内ADC进行模数变换,变换后的数字量再进入解码模块解码便得到舵面角位移。
舵机通过G105的SCI接收控制指令,与舵面反馈角位移综合后形成误差信号。误差信号在G105经过控制算法处理,输出控制电机的PWM和DIR方向信号,驱动电机转动,再通过传动机构驱动舵面到达指定的位置。
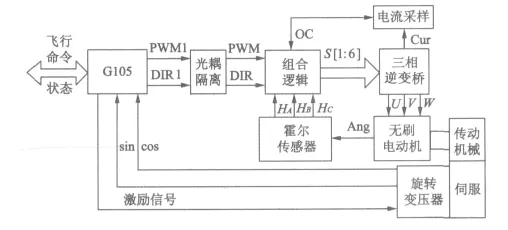
图5 舵机系统原理实现框图
3 系统分析与实现
3.1 旋转变压器激励模块设计
系统采用的旋转变压器所允许的激磁电压峰-峰值为16±0.5 V,变比为0.8±0.12。G105的激磁信号产生器的激磁频率可编程设置,这里选用的激磁信号的频率为19 kHz,产生的正弦激磁信号由G105的DAC输出。G105的DAC为电流输出型,支持单端输出和差分输出。考虑到激磁信号采用线缆传输到旋转变压器,激磁信号这里选择差分输出,从而增强激磁信号的抗共模干扰能力和驱动能力。G105差分输出驱动电流可以选择-8 mA、-16 mA、-32 mA、-64 mA。为降低G105的功耗,这里选择G105的输出电流为-8 mA,此时DAC的差分输出端电压应满足≥6 V,从而保证G105有足够的能力从外围电路吸收电流。这里对DAC的正相和反相输出端提供一个14 V的直流偏置,上拉电阻为1 kΩ。这里选用的直流偏置电源要求噪声小、纹波低,上拉电阻要求精度等级高、温漂低。如果偏置电源噪声和纹波大,或者两个上拉电阻的阻值有较大的偏差,将直接导致旋转变压器初级线圈的输入正弦激励信号的品质,进而导致解码结果出现偏差。所以,这里的偏置电源由LDO提供,上拉电阻的精度等级为+0.01%,电阻温度系数为±5 ppm/℃。G105 DAC的输出信号再经过运算放大器进行电压跟随,这里选用AD公司的低噪声高速集成运放AD8022。为避免信号通过AD8022时饱和,这里选择AD8022的供电电压为20 V,如图6所示。这样经过直流偏置、电压跟随后,DAC的正相端正弦电流信号和反相端正弦电流信号变为峰-峰值为8 V、电压范围在4~14 V的正交正弦电压信号DAC_P1、DAC_N1。然后,DAC_P1、DAC_N1分别作为旋转变压器初级线圈的正相端、反相端,则次级线圈输出电压的峰-峰值为UPP=12.8 V,电压范围为-6.4~6.4 V。

图6 旋转变压器激励模块原理图
3.2 旋变解码电路设计
G105内部有12通道的ADC,分辨率为14 bit,采样速率为1 MHz,支持单端输入和差分输入。在单端输入模式下,输入信号范围为0~15 V。而旋转变压器的输出电压信号的范围为-6.4~6.4 V,因此,必须对旋转变压器的输出信号进行直流偏置。为充分利用ADC的量程,这里选用的直流偏置电压为7.5 V,旋转变压器输出的电压信号范围变为1.1~13.9 V。设置ADC为单端输入模式,这样,经直流偏置的旋转变压器的输出信号可以直接进入G105进行角位移解码,考虑到进入G105的片内ADC的sin和cos信号质量将直接影响角度解码的结果,这里采用低压差稳压源为旋转变压器的输出信号提供一个低纹波的偏置电压。如图7所示。
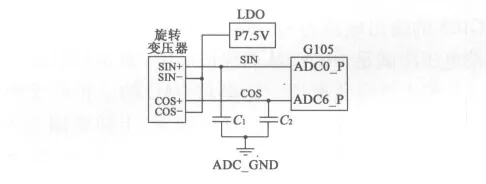
图7 旋转变压器解码接口电路原理图
4 试验测试结果
为了克服角度随机测量误差,这里采用中值滤波对测量数据进行处理[5]。实现中值滤波的方法为:G105对舵面的某一位置连续采样4次,去掉采样值中的最大值和最小值,然后对中间的2个值取平均作为本次测量的有效值。
考虑到舵面的零位和旋转变压器的零位在安装时未必能够精确对准,所以,当舵面处于零位时,舵机系统对旋转变压器的角位置采集四次,得到的结果分别为200.864 3°,200.850 4°,200.864 3°,200.850 4°。采用中值滤波,得到舵面在零位时的旋转变压器的角位置为200.857 4°。舵面角位置位移解算时,需要将G105解算得到的旋转变压器的角位置减去舵面在零位时旋转变压器的角位置,再除以舵轴与旋转变压器之间的传动比3.78。
由主控计算机向舵机发送-35.5°,-5.5°,18.0°,34.5°的控制指令,得到旋转变压器的初级线圈的正相端DAC_P1、反相端DAC_N1和次级绕组的输出感应电动势正弦输出和余弦输出测试波形,如图8所示。
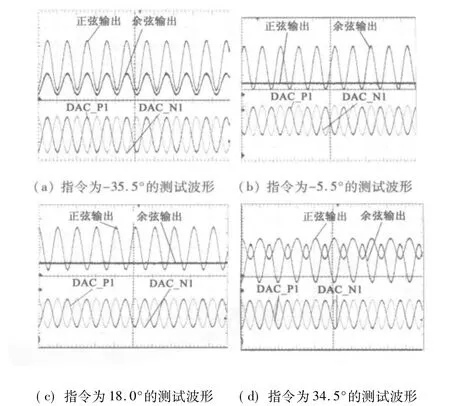
图8 旋转变压器的初级线圈的正相端、反相端和次级绕组的波形
在这个四个指令角度数据上,G105解码输出的结果如表1所示。

表1 G105的解码输出结果
由测试结果看出,该系统的实际解算出来的舵面位移与指令结果的误差绝对值小于0.1°,舵机的控制响应精度完全满足舵机系统的指标要求。
5 结 语
本文设计完成一个数字舵机系统,采用单极正余弦旋转变压器测量舵面角位移,并利用SOC G105的内部旋转变压器解码实现角位移的解码。试验结果证明,该数字舵机系统的控制接口电路和信号处理方法简单,避免了采用专门的RDC芯片实现角度的解码,有利于实现控制系统的小型化,并降低成本。同时,该方案测量精度比较高,完全能够满足大部分伺服舵机的性能要求,是一种比较实用的实现方案。
[1] 范祝霞,欧阳红林.基于旋转变压器的PMSM驱动系统位置反馈的研究[J].电气传动,2010,40(3):40-43.
[2] 吴红星,洪俊杰.基于旋转变压器的电动机转子位置检测研究[J].微电机,2008,41(1):1-3,9.
[3] 程明.微特电机及系统[M].中国电力出版社,2004.
[4] 黄科元,董恒,黄守道.旋转变压器在高速永磁同步电动机中的应用[J].微特电机,2008,(2):10-11,37.
[5] 罗德荣,周成,黄科元.基于AD2S1200的旋变接口电路设计及信号处理[J].电力电子技术,2008,42(8):68-70.